

§ 49.3 Складання обертань навколо осей, що перетинаються
П
Рис.
149 Рис.
150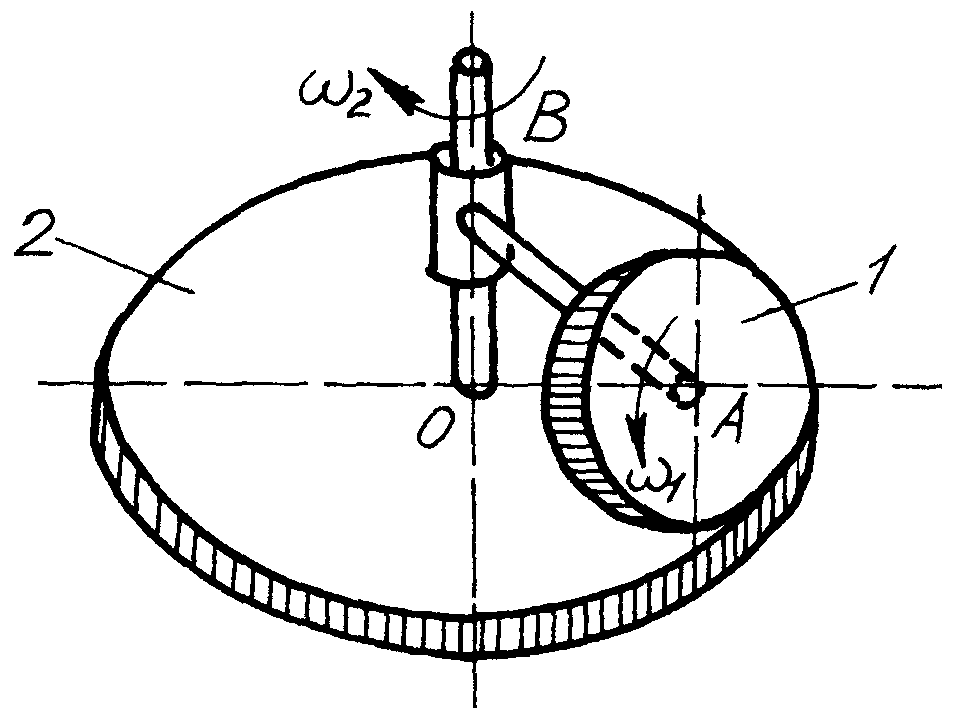

![]() (рис. 149). Елементарний аналіз руху
шестірні 1 показує, що вона одночасно
здійснює два обертання: обертається
навколо кривошипа
з кутовою швидкістю
і разом з кривошипом обертається навколо
вертикальної осі
(рис. 149). Елементарний аналіз руху
шестірні 1 показує, що вона одночасно
здійснює два обертання: обертається
навколо кривошипа
з кутовою швидкістю
і разом з кривошипом обертається навколо
вертикальної осі
![]() з кутовою швидкістю
.
Осі перетина-ються в точці
.
з кутовою швидкістю
.
Осі перетина-ються в точці
.
Для
визначення результуючого руху розглянемо
тверде тіло (рис. 150), яке одночасно
обертається навколо двох осей: навколо
осі
![]() з кутовою швидкістю
і навколо осі
з кутовою швидкістю
і навколо осі
![]() – з кутовою швидкістю
.
– з кутовою швидкістю
.
З точки перетину осей вздовж відповідних осей відкладемо вектори і і на цих векторах побудуємо паралелограм. Визначимо швидкості точок і – вершин цього паралелограма. Оскільки тіло здійснює складний рух, то кожна його точка також здійснює складний рух, а це означає, що швидкості кожної його точки можна обчислювати за теоремою про складання швидкостей
. (а)
Якщо одне обертання, наприклад, навколо осі , прийняти за переносний рух, а інше (навколо осі ) – за відносний, то матимемо:
для
точки
:
![]() ;
,
бо точка
знаходиться
як на осі переносного обертання
,
так і на осі відносного обертання
;
;
,
бо точка
знаходиться
як на осі переносного обертання
,
так і на осі відносного обертання
;
для
точки
:
![]() ,
,
![]() .
.
Враховуючи це, на підставі формули (а), отримаємо
![]()
![]()
![]()
тобто, абсолютні швидкості точок і в даний момент часу дорівнюють нулеві. Якщо через дані точки провести вісь , то вона буде геометричним місцем точок, абсолютні швидкості яких в даний момент часу дорівнюють нулеві, а це означає, що вона є миттєвою віссю абсолютного обертання.
Таким чином,
при складанні двох обертань твердого тіла навколо осей, які перетинаються, результуючий (абсолютний) рух тіла в кожний момент часу є обертальним навколо миттєвої осі, положення якої визначається діагоналлю паралелограма, побудованого на векторах кутових швидкостей складових обертань (рис. 150).
Позначимо
кутову швидкість абсолютного обертання
![]() і визначимо її. Для цього знайдемо
швидкість точки
,
положення якої визначається радіус-вектором
(рис. 150)
і визначимо її. Для цього знайдемо
швидкість точки
,
положення якої визначається радіус-вектором
(рис. 150)
. (б)
Оскільки переносний і відносний рух є обертальними, то вектори переносної і відносної швидкостей визначаються за формулою Ейлера
![]() ;
;
![]() .
.
З другого боку, як тільки що було доведено, абсолютний рух тіла є обертальним навколо миттєвої осі , а це означає, що і абсолютна швидкість точки буде визначатись формулою Ейлера
![]() .
.
Враховуючи сказане, формула (б) набуває вигляду
![]() .
.
Оскільки точка , отже і її радіус-вектор довільні, то матимемо
![]() .
(2.101)
.
(2.101)
Кутова швидкість результуючого (абсолютного) обертання дорівнює геометричній сумі кутових швидкостей складових рухів.
Звернемо увагу на те, що геометрично визначаючи кутову швидкість абсолютного обертання за формулою (2.101), знаходимо не тільки її величину і напрям, а й вказуємо положення миттєвої осі абсолютного обертання (див. рис. 150).
Очевидно, базуючись на принципі незалежності рухів, доведене вище можна узагальнити на рух твердого тіла, який складається з трьох і більше миттєвих обертань навколо осей, що перетинаються в одній точці, тобто:
сукупність обертань тіла навколо осей, що перетинаються в одній точці, еквівалентна одному обер-танню з кутовою швидкістю, яка дорівнює геометричній сумі кутових швидкостей складових рухів
![]() .
(2.102)
.
(2.102)
Отримане обґрунтовує векторну природу кутової швидкості твердого тіла , оскільки кутові швидкості твердого тіла підпорядковуються правилу векторного складання. Припущення, які були зроблені в §43.4 про кутову швидкість як про ковзний вектор, отримало тут повне обґрунтування. До того ж воно підтверджує теорему Ейлера–Даламбера (див § 47.2), згідно з якою сферичний рух тіла, який є сукупністю трьох обертань, в кожний момент часу можна розглядати як обертання навколо миттєвої осі з кутовою швидкістю , яку, якщо задані рівняння обертання твердого тіла навколо нерухомої точки (рів. 2.77) згідно з (2.102), можна визначити за формулою
![]() ,
(2.103)
,
(2.103)
в
якій
![]() ,
,
![]() ,
,
![]() – миттєві алгебраїчні кутові швидкості
тіла відповідно навколо осей
,
,
;
,
– миттєві алгебраїчні кутові швидкості
тіла відповідно навколо осей
,
,
;
,
![]() ,
,
![]() – орти відповідних осей (див. рис 134).
– орти відповідних осей (див. рис 134).