

Питання для самоконтролю
1. Яка система сил називається довільною?
2. Що називається головним вектором довільної системи сил?
3. Що називається головним моментом системи сил відносно деякої точки?
4. Як геометрично визначається головний вектор довільної системи сил?
5. Запишіть формули, за допомогою яких аналітично визначається головний вектор довільної системи сил.
6
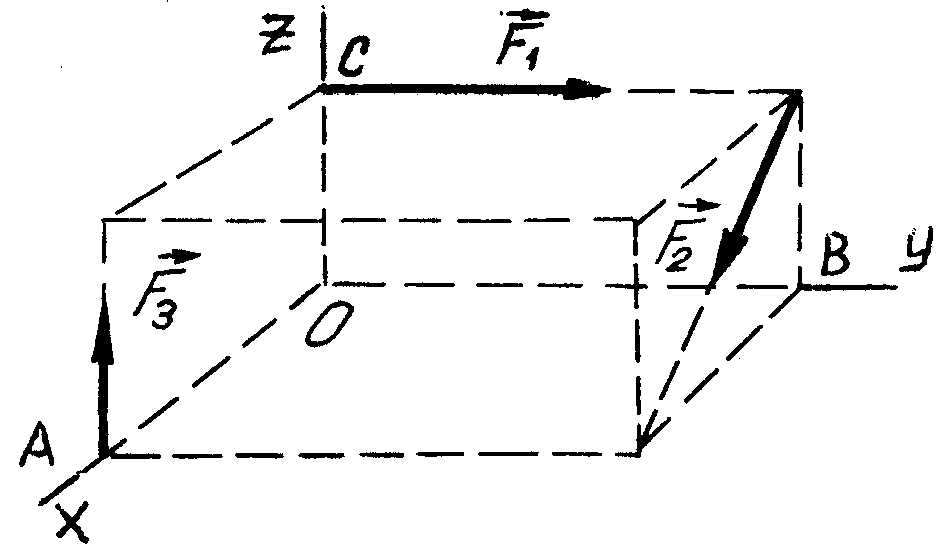
![]() Н,
Н,
![]() Н,
Н,
![]() Н,
Н,
![]() м,
м,
м,
![]() м.
м.
7. Запишіть формули, за допомогою яких аналітично визначається головний момент довільної системи сил відносно деякої точки.
8. Визначіть головний момент системи сил відносно початку координат, яка задана в прикладі № 6.
9. Що називається парою сил?
10. Сформулюйте теорему про момент пари сил відносно довільної точки.
11. Який напрям має вектор моменту пари сил?
12. Запишіть формулу, яка чисельно визначає момент пари сил відносно деякої точки.
13. Які пари сил називається еквівалентними?
14. Сформулюйте теорему про додавання пар сил.
15. До якого канонічного вигляду зводиться система пар сил?
16. Сформулюйте необхідну і достатню умову рівноваги системи пари сил.
17. Запишіть аналітичні умови рівноваги системи пар сил.
18. Сформулюйте лему про паралельний перенос сили в деяку точку.
1
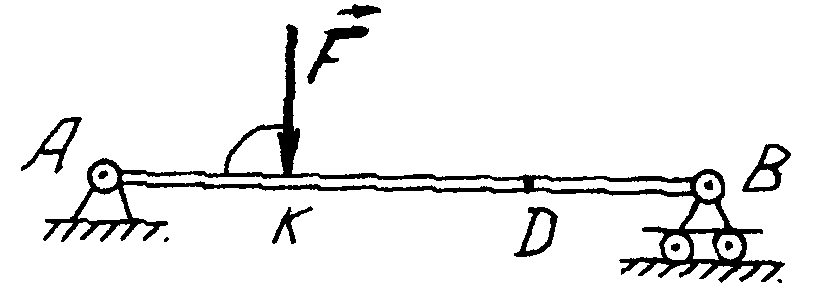
![]() паралельно перенесли з точки К
в точку D.
Що треба зробити, щоб величини реакцій
шарнірів А
і В
не змінились, якщо
паралельно перенесли з точки К
в точку D.
Що треба зробити, щоб величини реакцій
шарнірів А
і В
не змінились, якщо
![]() м,
KD
= 0,4 м ?
м,
KD
= 0,4 м ?
20. Якщо довільну систему сил звести до деякого центра, що в загальному випадку отримаємо?
21. Коли довільна система сил зводиться до пари сил?
22. В яких випадках канонічним виглядом довільної системи сил є рівнодійна?
23. Що таке динама?
24. Сформулюйте необхідну і достатню умову рівноваги довільної системи сил.
25. Запишіть аналітичні умови рівноваги довільної просторової системи сил.
26. Запишіть аналітичні умови рівноваги довільної плоскої системи сил.
27. В яких формах можна записати аналітичні умови рівноваги довільної плоскої системи сил?
28. Що називається інваріантом довільної системи сил?
29. Які Ви знаєте інваріанти довільної системи сил?
30. Запишіть формулу, яка відображає залежність головного моменту системи сил від центра зведення.
31. Які задачі називаються статично означеними?
32. Як класифікуються сили, що діють на систему тіл, з’єднаних між собою?
33. Задано систему двох тіл, з’єднаних між собою. На одне тіло діє довільна плоска система сил, на інше – плоска система паралельних сил. Скільки найбільше невідомих можна визначити в цій задачі?
1.4 Деякі спеціальні питання статики
В попередніх розділах були розв’язані основні задачі теоретичного курсу статики – це зведення систем до канонічного вигляду і визначення умов (рівнянь) їх зрівноваження. Тепер розглянемо деякі питання, котрі, з одного боку, розширюють коло задач, які розв’язує статика в напрямку їх реальності, а, з другого боку, стануть прикладом практичного застосування от-риманих положень для розв’язування конкретних задач. Одним із напрямків реалізації задач статики є врахування сил тертя.
Опір, що виникає при русі або намаганні рухатися одного тіла по поверхні іншого, називається тертям.
Оскільки найчастіше одне тіло може ковзати або котитись по поверхні іншого тіла, то в теоретичній механіці розглядають два види тертя: тертя ковзання і тертя кочення.