

§ 43.4 Вектор кутової швидкості
Для спрощення майбутніх теоретичних викладок зробимо одне припущення. Припустимо, що кутова швидкість – це вектор.
Вектором кутової швидкості твердого тіла, яке обер-тається навколо нерухомої осі, будемо називати вектор, який чисельно дорівнює модулю алгебраїчної кутової швидкості і напрямлений вдовж осі обертання в бік, звідки обертання тіла видно проти руху годинникової стрілки (рис. 104).
В
Рис. 104
![]() є ковзним вектором, бо його можна
відкласти з будь-якої точки осі.
є ковзним вектором, бо його можна
відкласти з будь-якої точки осі.
Задання вектора кутової швидкості повністю визначає обертальний рух тіла, адже він вказує на положення осі обертання, напрям обертання і швидкість обертання. Сам вектор швидкості можна виразити так:
![]() (2.50)
(2.50)
де – одиничний вектор осі обертання.
Оскільки кутове пришвидшення дорівнює першій похідній за часом від кутової швидкості, то:
перша похідна за часом від вектора кутової швидкості визначає вектор кутового пришвидшення
![]() (2.51)
(2.51)
або,
використовуючи формулу (2.50) і знаючи,
що
![]() ,
матимемо
,
матимемо
![]() (2.52)
(2.52)
З формули (2.52) випливає, що вектор кутового пришвидшення тіла, що обертається навколо нерухомої осі, також напрямлений по осі обертання, а можливі випадки взаємного розміщення векторів і показані на рис. 105).
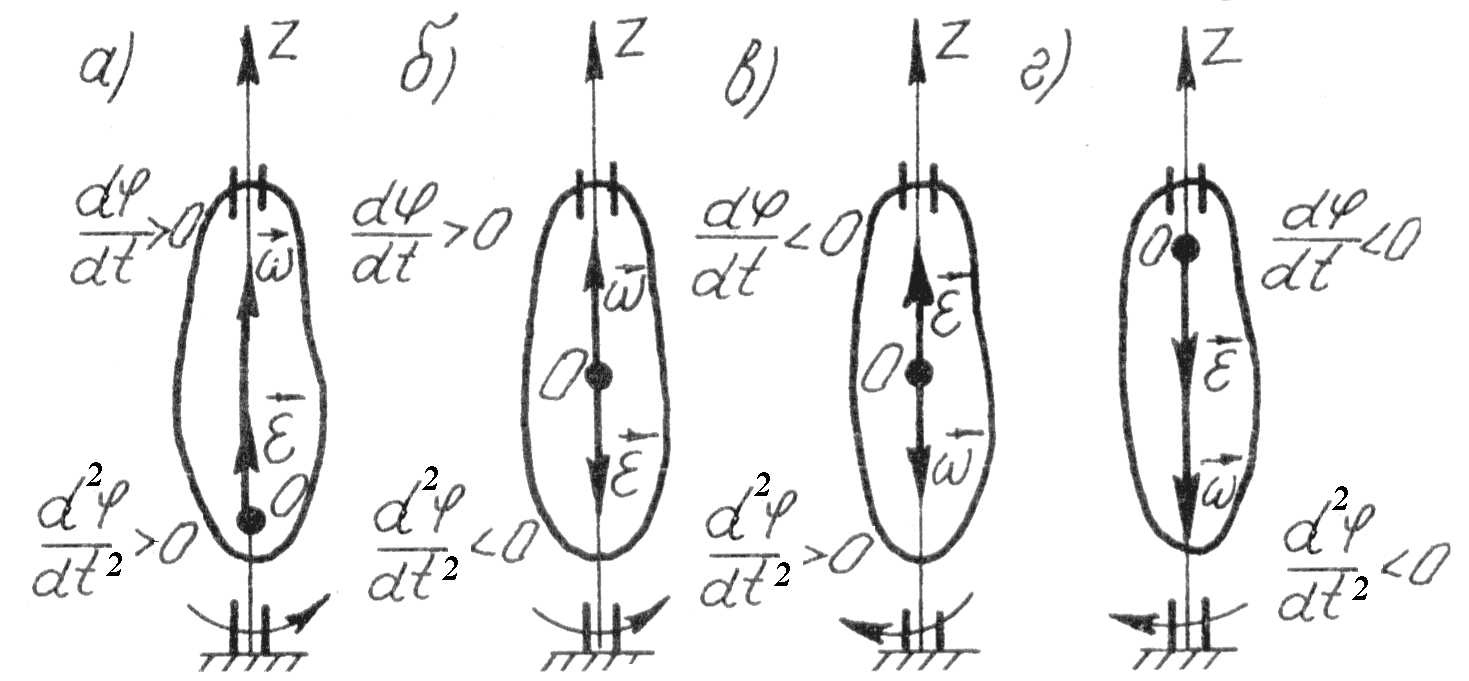
Рис. 105
§ 43.5 Векторні вирази швидкості, доцентрового і обертального пришвидшень точки тіла при обертальному русі
Розглянемо тверде тіло, що обертається навколо нерухомої осі (рис. 106), на якому також зображено:
– траєкторію довільної точки тіла;
– вектор її швидкості , дотичний до траєкторії і напрямлений в бік обертання;
– вектор кутової швидкості тіла з довільної її точки в бік, звідки обертання тіла видно проти руху годинникової стрілки;
– радіус-вектор точки . Початок його знаходиться в центрі .
З
Рис. 106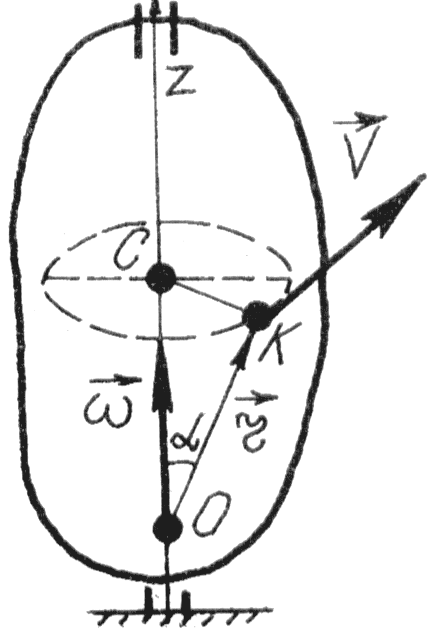
![]() (бо вектор швидкості перпендикулярний
до радіуса обертання) і
(бо вектор швидкості перпендикулярний
до радіуса обертання) і
![]() (тому що вектор швидкості знаходиться
в площині траєкторії, яка в даному
випадку перпендикулярна до осі обертання).
Отже, вектор
є перпендикулярним до площини
(тому що вектор швидкості знаходиться
в площині траєкторії, яка в даному
випадку перпендикулярна до осі обертання).
Отже, вектор
є перпендикулярним до площини
![]() ,
тобто до площини, яка проходить через
вектори
і
.
Величина вектор швидкості визначається
за формулою (2.44)
,
тобто до площини, яка проходить через
вектори
і
.
Величина вектор швидкості визначається
за формулою (2.44)
![]()
 (а)
(а)
З
![]() маємо
маємо
![]() .
.
Підставивши значення у формулу (а), отримаємо
![]() .
.
Отже,
модуль швидкості дорівнює модулю
векторного добутку
і
,
який можна записати двояко:
![]() або
або
![]() .
З визначення векторного добутку випливає,
що тільки добуток
.
З визначення векторного добутку випливає,
що тільки добуток
![]() буде визначати вектор, який співпадає
за напрямом з вектором швидкості
,
тобто
буде визначати вектор, який співпадає
за напрямом з вектором швидкості
,
тобто
![]() ,
,
або
![]() .
(2.53)
.
(2.53)
Вектор швидкості точки тіла, яке обертається навколо нерухомої осі, дорівнює векторному добутку кутової швидкості на радіус-вектор точки, початок якого знаходиться в довільному центрі на осі.
Формулу (2.53) часто називають формулою Ейлера. Зауважимо, що за часів Л. Ейлера (1707-1783) поняття векторного добутку ще не існувало, але ним були отримані формули
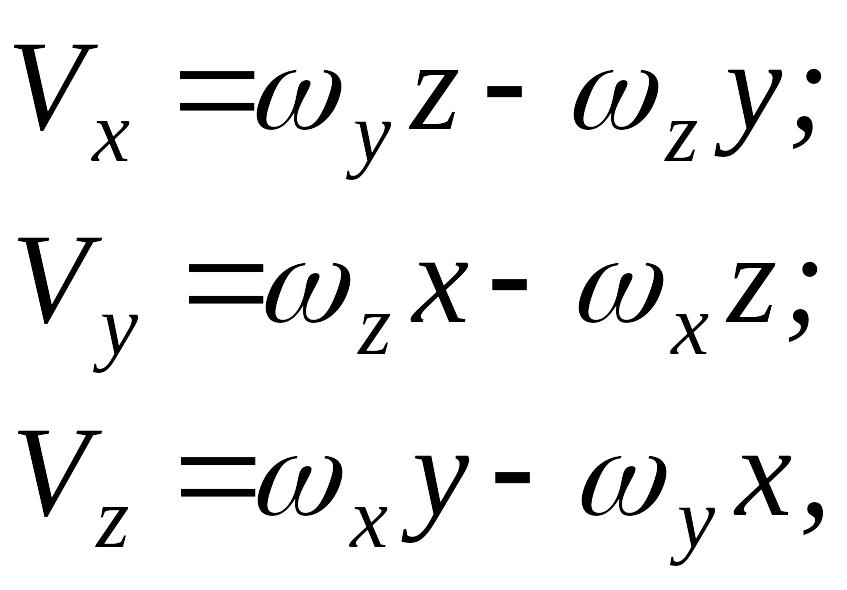 (2.54)
(2.54)
які є фактично проекціями векторного добутку (2.53) на декартові осі координат.
Оскільки
![]()
то враховуючи формулу (2.53), отримаємо формулу, яка визначає значення першої похідної за часом від радіуса-вектора, який змінюється тільки за напрямом
![]() .
(2.55)
.
(2.55)
Взявши першу похідну за часом від формули (2.53)
![]()
і
враховуючи, що
![]()
![]()
![]() отримаємо
отримаємо
![]()
Легко
показати (пропонується кожному читачеві
це зробити самостійно), що векторний
добуток
![]() визначає вектор обертального
(тангенціального) пришвидшення, а
векторний добуток
визначає вектор обертального
(тангенціального) пришвидшення, а
векторний добуток
![]() визначає вектор доцентрового (нормального)
пришвидшення, тобто
визначає вектор доцентрового (нормального)
пришвидшення, тобто
![]() ,
(2.56)
,
(2.56)
![]() .
(2.57)
.
(2.57)
Формули (2.53), (2.56), (2.57) є векторними виразами швидкості, тангенціального (обертального) і нормального (до-центрового) пришвидшень.