

Питання для самоконтролю
1. Який рух точки називається складним?
2. Який рух точки називається абсолютним?
3. Чи можна вважати складним рух штучного супутника навколо Землі? Обгрунтувати.
4. Наведіть два приклади складного руху точки.
5. Точка здійснює складний рух. Який рух точки називається переносним?
6. Який рух точки називається відносним?
7. Сформулюйте теорему про складання швидкостей точки в складному русі.
8. Запишіть формулу, яка визначає абсолютну швидкість точки, котра здійснює складний рух.
9.
По вагону, що рухається з швидкістю
![]() м/с, йде людина з швидкістю
м/с, йде людина з швидкістю
![]() м/с. Який рух людини буде відносним? Яка
швидкість відносного руху людини?
м/с. Який рух людини буде відносним? Яка
швидкість відносного руху людини?
10. В деякий моменти часу точка має переносну швидкість 4 м/с, відносну швидкість 3 м/с. Визначити абсолютну швидкість точки, якщо кут між напрямами відносної і переносної швидкостей дорівнює 0, 90, 180.
11. Сформулюйте теорему про складання пришвидшень точки в складному русі у випадку переносного поступального руху.
12. Запишіть формулу, за допомогою якої визначається величина пришвидшення Коріоліса.
13. Запишіть формулу, яка визначає вектор пришвидшення Коріоліса.
14. Сформулюйте теорему, за допомогою якої визначається пришвидшення точки в складному русі.
15. Запишіть формулу, за допомогою якої визначається пришвидшення токи в складному русі.
16. В яких випадках пришвидшення Коріоліса дорівнює нулю?
17. Як визначається напрям пришвидшення Коріоліса?
18. Точка здійснює складний рух. Вектор її відносної швидкості напрямлений вздовж осі абсцис. Вектор кутової швидкості переносного обертання напрямлений вздовж осі ординат. Знайти напрям вектора пришвидшення Коріоліса.
19. Чому дорівнює абсолютне пришвидшення точки, коли кут між і дорівнює 180?
2.4 Кінематика складного руху твердого тіла
§ 45 Складний рух твердого тіла
Складним рухом твердого тіла називається такий рух, при якому тіло одночасно здійснює два або декілька рухів.
Наприклад, автомобільне колесо здійснює складний рух: рухається поступально разом з автомобілем і одночасно обертається навколо своєї осі. Земля здійснює складний рух. Як відомо з астрономії, вона одночасно обертається навколо трьох осей, до того ж рухається по еліптичній орбіті навколо Сонця і т.д.
Фактично в природі всі тіла здійснюють складний рух.
Вивчення складного руху твердого тіла залежно від задач, які ставляться, можна проводити двома методами: методом аналізу або методом синтезу. Метод аналізу полягає в розкладанні заданого руху твердого тіла на прості (поступальний і обертальний) рухи. В методі синтезу складний рух твердого тіла отримується шляхом складання простих рухів. Як в першому, так і в другому методах всі кінематичні характеристики руху тіла визначаються через кінематичні характеристики складових рухів, що і є основним завданням кінематики складного руху тіла.
§ 46 Плоскопаралельний (плоский) рух твердого тіла
§ 46.1 Основні поняття і визначення
Плоскопаралельним (плоским) рухом твердого тіла називається такий його рух, при якому всі точки тіла рухаються в площинах, паралельних деякій нерухомій площині.
Частковим випадком плоскопаралельного руху є обертання твердого тіла навколо нерухомої осі, адже в даному русі, як відомо з попереднього, всі точки тіла рухаються в площинах, які перпендикулярні до осі обертання, тобто в паралельних площинах.
Більш загальним прикладом плоскопаралельного руху є рух призми (на рис. 110 зображено частковий випадок призми – паралелепіпед), основа якої довільно переміщається по нерухомій площині Н. При такому русі всі її точки переміщаються в площинах, паралельних площині Н. Плоскопаралельний рух широко розповсюджений в техніці. Переважна більшість механізмів, які зустрічаються на практиці, є сукупністю твердих тіл, що з’єднані між собою, і рухаються паралельно деякій площині, тобто здійснюють плоскопаралельний рух. Таким є, наприклад, рух окремих ланок кривошипно-шатун-ного механізму (рис. 111). Всі точки кожної з його ланок рухаються паралельно нерухомій площині (площині рисунка). Але плоский рух кривошипа ОА є обертальним, бо він має закріплену точку О . Плоский рух повзуна В є поступальним, тому що будь-яка пряма цього повзуна переміщається паралельно своєму початковому положенню. Рух шатуна АВ є найбільш загальним прикладом плоскопаралельного руху, бо його рух не є ні обертальним (оскільки шатун не має нерухомої точки), ні поступальним (оскільки пряма АВ не залишається при русі шатуна паралельною своєму початковому положенню).
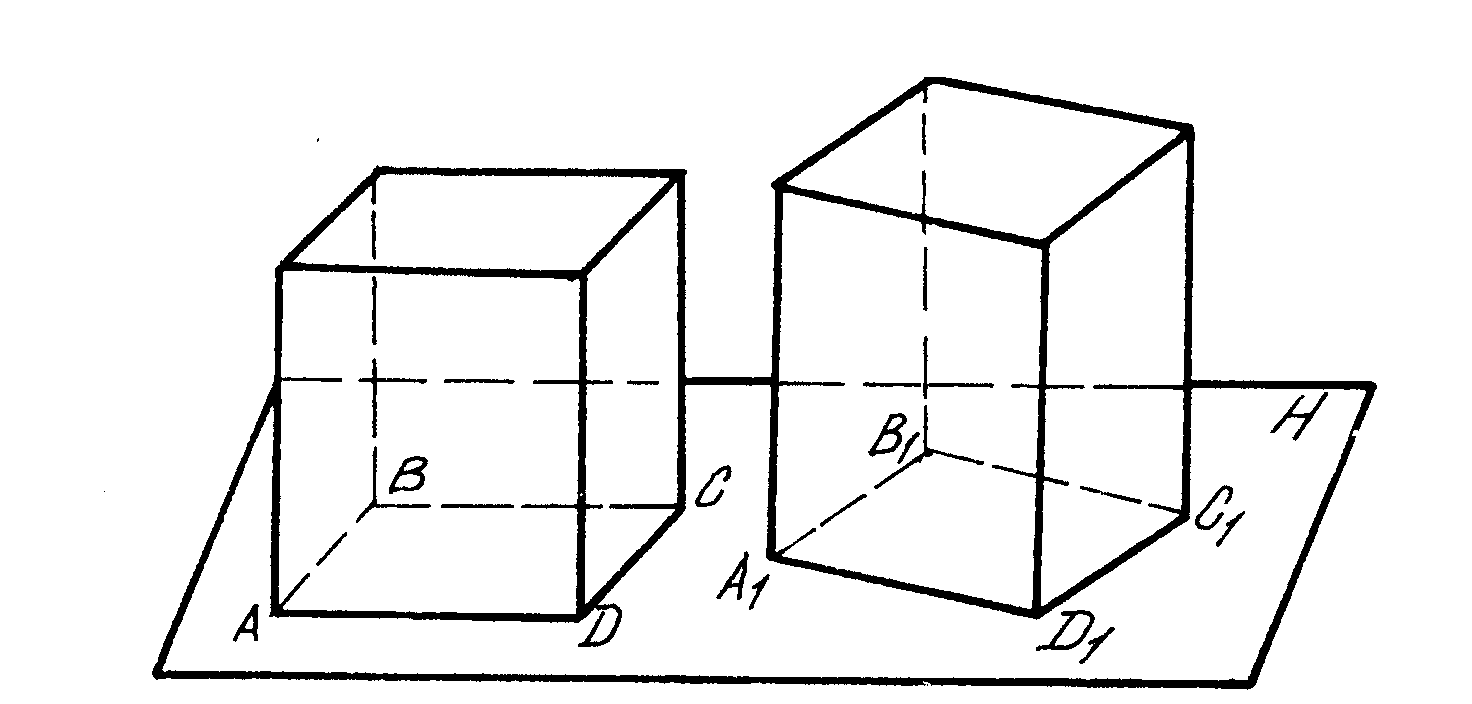
Рис. 110

Рис. 111
А
тепер детально проаналізуємо загальний
випадок плоскопаралельного руху твердого
тіла. Нехай точки тіла М
рухаються паралельно деякій нерухомій
площині Н
(рис.112). Перетнемо тіло деякою площиною
![]() ,
що паралельна площині Н
(Н1
|
| Н).
В перетині отримаємо плоску фігуру S.
Ця плоска фігура при русі тіла буде
переміщатися в площині
,
тобто
,
що паралельна площині Н
(Н1
|
| Н).
В перетині отримаємо плоску фігуру S.
Ця плоска фігура при русі тіла буде
переміщатися в площині
,
тобто
![]() .
Проведемо відрізок прямої АА
перпендикулярно до плоскої фігури S.
На цьому відрізку візьмемо дві точки
.
Проведемо відрізок прямої АА
перпендикулярно до плоскої фігури S.
На цьому відрізку візьмемо дві точки
![]() – точку перетину відрізка АА
з плоскою фігурою S
і
– точку перетину відрізка АА
з плоскою фігурою S
і
![]() – довільну точку цього відрізка. При
вказаному русі тіла відрізок АА
буде здійснювати поступальний рух, тому
що відстані точок цього відрізка до
нерухомої площини
Н
не міняються, а це означає що відрізок
АА
залишається при русі перпендикулярним
до площини Н,
тобто паралельний сам собі. А це означає,
що траєкторія точки
буде тотожна траєкторії точки
(
– довільну точку цього відрізка. При
вказаному русі тіла відрізок АА
буде здійснювати поступальний рух, тому
що відстані точок цього відрізка до
нерухомої площини
Н
не міняються, а це означає що відрізок
АА
залишається при русі перпендикулярним
до площини Н,
тобто паралельний сам собі. А це означає,
що траєкторія точки
буде тотожна траєкторії точки
(![]() ).
Швидкості і пришвидшення цих точок
геометрично рівні (
).
Швидкості і пришвидшення цих точок
геометрично рівні (![]() ,
,
![]() ).
).
Тепер
проведемо відрізок прямої ВВ
перпендикулярно
до плоскої фігури S.
На цьому відрізку візьмемо дві точки:
![]() – точку перетину відрізка ВВ
з плоскою фігурою S
і
– точку перетину відрізка ВВ
з плоскою фігурою S
і
![]() – довільну точку цього відрізка.
Аналогічно міркуючи, отримаємо, що
траєкторія точки
тотожна траєкторії точки
.
Швидкість і пришвидшення точки
геометрично рівні швидкості і пришвидшенню
точки
(
– довільну точку цього відрізка.
Аналогічно міркуючи, отримаємо, що
траєкторія точки
тотожна траєкторії точки
.
Швидкість і пришвидшення точки
геометрично рівні швидкості і пришвидшенню
точки
(![]() ).
).
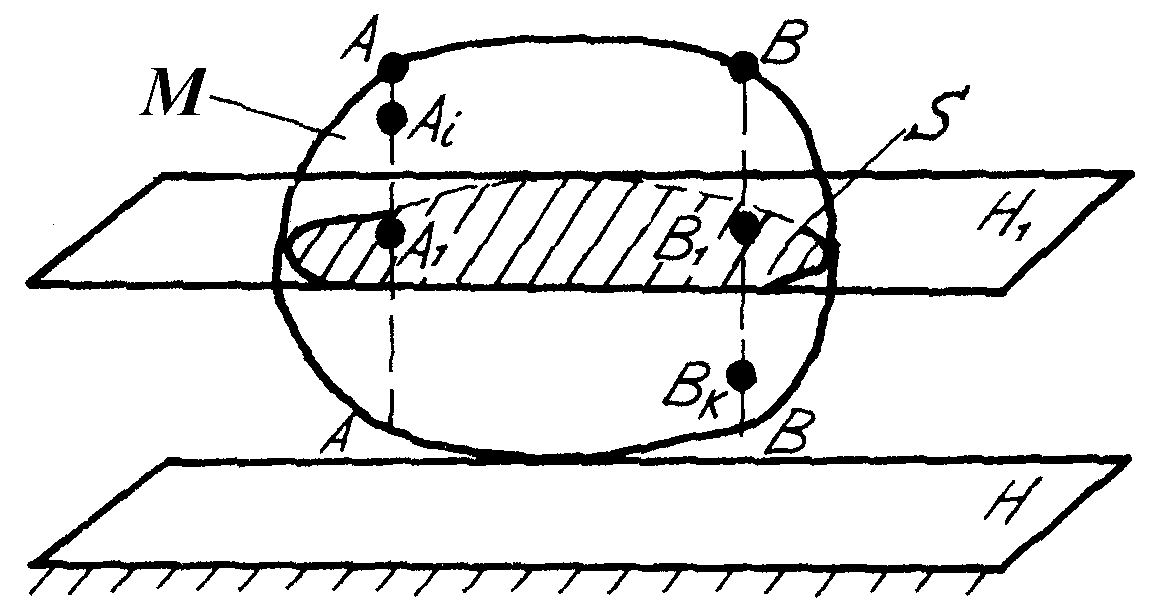
Рис. 112
Через кожну точку плоскої фігури можна провести відповідні відрізки і отримати аналогічні висновки, тобто кінематичні характеристики руху точок кожного відрізка будуть співпадати (одинаковими) з кінематичними характеристиками руху точки перетину відповідного відрізка з плоскою фігурою.
Отже,
плоскопаралельний рух твердого тіла цілком визначається рухом його плоскої фігури.
Таким чином, вивчення плоскопаралельного руху твердого тіла зводиться до вивчення руху його плоскої фігури, яка утворюється шляхом перетину тіла площиною, що паралельна до площини, паралельно якій рухається тіло.