

§ 8 Умови і рівняння рівноваги системи збіжних сил
За визначенням зрівноваженої системи сил маємо
. (а)
Для системи збіжних сил (див. 1.5) отримали
. (б)
Порівнюючи еквівалентності (а) і (б), отримаємо:
для рівноваги системи збіжних сил необхідно і достатньо, щоб її рівнодійна дорівнювала нулеві
![]() .
(1.10)
.
(1.10)
Векторна рівність (1.10) є необхідною і достатньою умовою рівноваги системи збіжних сил. З даної умови випливає:
1. Геометрична умова рівноваги.
Як відомо, рівнодійна – це замикаюча сторона силового багатокутника (рис. 20 г). Отже, умова (1.10) буде виконуватись тільки тоді, коли остання вершина силового багатокутника суміститься з першою вершиною, тобто силовий багатокутник буде замкнутим.
Таким чином,
необхідною і достатньою умовою рівноваги системи збіжних сил (рис. 20 в) є замкнутість її силового багатокутника (рис. 20 є).
2. Аналітичні умови рівноваги. Рівняння рівноваги.
Згідно
з формулою (1.8), котра визначає модуль
рівнодійної, умова (1.10) буде виконуватись
тільки тоді, коли
![]() ,
,
![]() ,
,
![]() ,
а це означає (див. формулу 1.7), що
,
а це означає (див. формулу 1.7), що
для рівноваги системи збіжних сил необхідно і достатньо, щоб суми проекцій цих сил на три взаємно перпендикулярні осі дорівнювали нулеві
![]() ;
;
![]() ;
;
![]() .
(1.11)
.
(1.11)
Очевидно, для плоскої системи збіжних сил матимемо
; . (1.12)
Таким чином, для системи збіжних сил умова рівноваги (1.10) має дві форми: геометричну – це замкнутий силовий багатокутник і аналітичну – це виконання рівності (1.11). Отже, задачі на рівновагу системи збіжних сил можна розв’язу-вати двома способами – геометрично і аналітично. Перший спосіб зручний для плоскої системи збіжних сил.
Аналітичні умови рівноваги (1.11) чи (1.12) розписані для конкретної задачі, в які входять невідомі параметри (реакції в’язей, активні сили, відстані, кути і т. ін.), називаються рівняннями рівноваги.
§ 9 Алгоритм розв’язання задач на рівновагу
Всі задачі на рівновагу матеріального об’єкта, незважаючи на те, яка система діє на нього, бажано розв’язувати за таким алгоритмом.
1. Виділити матеріальний об’єкт (точку, тверде тіло, систему твердих тіл), рівновага якого буде розглядатись.
2. До виділеного матеріального об’єкта прикласти всі активні сили.
3. Користуючись принципом звільнення від в’язей, відкинути в’язі, які накладені на виділений об’єкт, замінивши їх дію відповідними реакціями.
4. Залежно від отриманої системи сил вибрати відповідні умови рівноваги.
5. Скласти рівняння рівноваги.
6. З отриманих рівнянь знайти шукані величини.
(Див. додаток 3, в якому розглянуті відповідні приклади.)
Питання для самоконтролю
1. Яка система сил називається збіжною?
2. До якого канонічного вигляду зводиться збіжна система сил?
3. Сформулюйте необхідну і достатню умову рівноваги збіжної системи сил.
4. Запишіть аналітичні умови рівноваги просторової системи збіжних сил.
5. Сформулюйте геометричну умову рівноваги системи збіжних сил.
6. Запишіть аналітичні умови рівноваги плоскої системи збіжних сил.
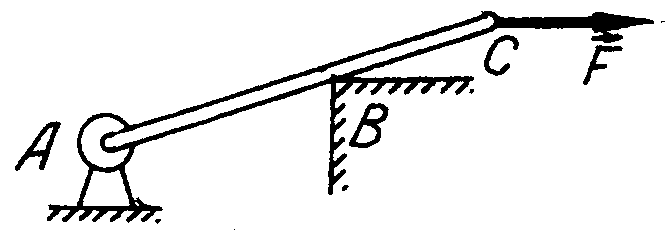
7. Сформулюйте теорему про три сили.
8. За теоремою про три сили вкажіть лінію реакції циліндричного шарніра (рис. А).
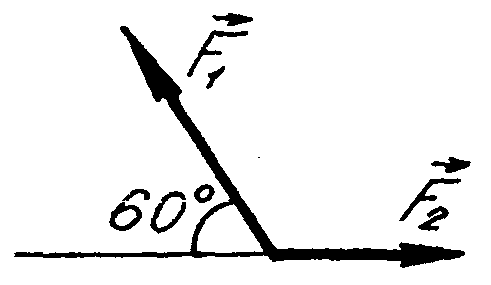
9.
Визначіть величину рівнодійної двох
рівних за модулем сил
![]() Н,
які прикладені до однієї точки, утворюючи
між собою кут 60.
Н,
які прикладені до однієї точки, утворюючи
між собою кут 60.
10.
Визначіть величину і напрям рівнодійної
системи сил (рис. Б), якщо
![]() Н,
Н,
![]() Н.
Н.
11.
Для системи збіжних сил
![]() ,
,
![]()
![]() ,
,
![]() визначіть величину і напрям рівнодійної.
визначіть величину і напрям рівнодійної.
Рис. А |
Рис. Б |
12.
Кут між силами
![]() Н,
які прикладені до однієї точки, дорівнює
120.
Визначіть модуль сили
,
яка зрівноважить задані сили.
Н,
які прикладені до однієї точки, дорівнює
120.
Визначіть модуль сили
,
яка зрівноважить задані сили.
13.
Вздовж діагоналі куба діє сил
![]() Н.
Визначіть її проекції на координатні
осі, початок яких знаходиться в точці
прикладання сили і які напрямлені вздовж
ребер куба.
Н.
Визначіть її проекції на координатні
осі, початок яких знаходиться в точці
прикладання сили і які напрямлені вздовж
ребер куба.