

жидкость на уборку интерцепторов. Из линии выпуска рулевых приводов жидкость сливается в гидробак через обратные клапаны, минуя электромагнитный кран.
Когда последний замок рулевых приводов закроется, он через концевой выключатель обесточит цепь электромагнитного крана. Таким образом, при случайном срыве одного из интерцепторов во время полета с замка обеспечивается автоматическое включение электромагнитного крана на уборку интерцепторов.
При отказе гидросистемы в выпущенном положении средних интерцепторов допускается проседание их под действием аэродинамической нагрузки, со скоростью не более 3 град/с, а также уборка их пилотами до углов 1,7°—2,2° при перемещении ручки в крайнее переднее положение.
Каждый из четырех рулевых приводов имеет замок, который запирает интерцептор в убранном положении.
Для контроля за синхронной работой средних интерцепторов на приборной доске расположены четыре зеленых табло с надписью «Средние». Табло «Левые» и «Правые» имеют трафарет «Замки интерцепторов открыты». Табло не горит при убранных интерцепторах. Когда происходит открытие замков, электроцепь табло замыкается от концевых выключателей, расположенных на рулевых приводах РП-59.
Рядом с табло расположена кнопка КНР «Отключения электромагнитного крана средних интерцепторов». Кнопка применяется для аварийной уборки интерцепторов в случае отказа системы основного управления интерцепторами. В этом случае интерцепторы убираются под действием аэродинамической нагрузки.
5.12. ГИДРОСИСТЕМА УПРАВЛЕНИЯ РУЛЕВЫМИ ПРИВОДАМИ И РУЛЕВЫМИ АГРЕГАТАМИ
Все агрегаты данной системы (см. рис. 5.8) питаются рабочим давлением, которое может подводиться от первой, второй и третьей гидросистем. Величина рабочего давления, подводимого к агрегатам, равна 210 кгс/см2, за исключением величины рабочего давления рулевых приводов системы управления рулем высоты, которые работают при номинальном давлении, равном 125 кгс/см2.
В систему входят электромагнитный кран ГА-165 80, фильтр 8Д2.966.037-2 84, редуктор ГА-213 83, обратный клапан 25, рулевые приводы элерон-интерцепторов РП-57 и РП-58 85, рулевой привод руля высоты РП-56 87, рулевой привод руля направления РП56 88, рулевой привод элеронов РП-55 86, рулевой при вод элеронов РА-56В 91, рулевой агрегат руля высоты РА-56В 90 и рулевой агрегат руля направления РА-56В 89.
Редуктор ГА-213 (рис. 5.66) служит для понижения давления жидкости в системе управления рулевыми приводами рулей высоты с 210 до 125±10 кгс/см2. Кроме этого, он работает как предохранительный клапан, предотвращая повышение давления в системе выше 125 кгс/см2.
267
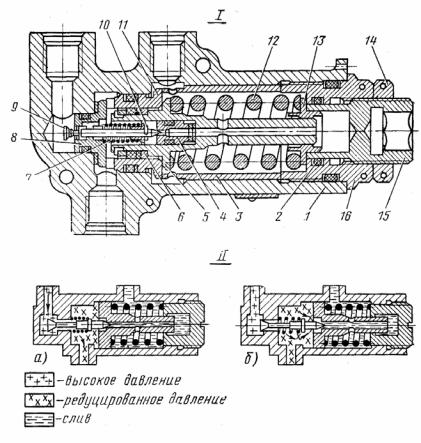
Рис. 5.66. Редуктор ГА-213:
I—общий вид: 1—корпус; 2—уплотнительное кольцо; 3—втулка; 4, 8—седла; 5—поршень; 6—бронзовое кольцо; 7, 12—пружины; 9, 10—клапаны; 11—гильза; 13—направляющая; 14—гайка; 15—винт; 16—опора; II—схема работы; а—работа редуктора на систему, б—работа редуктора в качестве предохранительного клапана
Редуктор состоит из корпуса 1, клапанов впуска 9 и выпуск 10 с пружиной 7 и поршня 5 с редукционной пружиной 12. Об клапана связаны между собой штоком.
На корпусе расположены три штуцера: «Насос» — для подвода жидкости с высоким давлением, «Бак» —для сообщения гидробаком и «Система» — для подачи жидкости под редуцированным давлением к рулевым приводам. При отсутствии давления в системе поршень под действием редукционной пружины смещен влево. Клапан выпуска 10, сидит на поршне, закрывая линию слива, клапан выпуска 9 открыт.
Жидкость, подаваемая к редуктору, проходит через открытый клапан впуска в полость над поршнем. Под действием повышающегося давления поршень смещается вправо, клапаны выпуска и впуска следуют за ним. При давлении жидкости на поршень, равном 125 кгс/см2, клапан впуска сядет на седло, закрыв поступление жидкости к рулевым приводам.
268
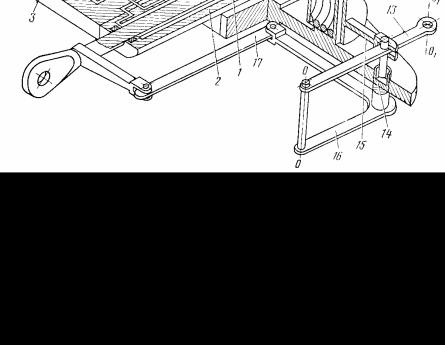
Рис. 5.67. Рулевой привод РП-57:
1 —шток; 2—цилиндр; 3—корпус; 4—предохранительное устройство; 5—рычаг; 6— фиксатор; 7—вал; 8—золотник; 9—фильтр; 10—перепускной клапан; 11— распределитель;12—пружина; 13—входная качалка; 14—ограничитель хода золотника: 15—привод золотника; 16—качалка; 17—тяга
Если в системе имеется расход жидкости, то клапан впуска займет промежуточное положение, при котором количество жидкости, проходящей через клапан, будет равно ее расходу в системе.
При повышении давления жидкости в линии рулевых приводов выше 125 кгс/см2 поршень перемещается дальше вправо, отходя от клапана выпуска. Через образовавшуюся щель между клапанами выпуска и поршнем избыточное давление жидкости сбросится в гидробак.
Повышение давления может произойти в результате негерметичности клапана впуска или температурных расширений жидкости в линии рулевых приводов.
На самолете установлено три редуктора ГА-213, они расположены на третьем лонжероне киля между нервюрами № 12 и 15.
Рулевые приводы РП-57 и РП-58 являются силовыми агрегатами, обеспечивающими отклонение элеронов-интерцепторов. Кроме того, через рулевой привод РП-57 передается сигнал на управление рулевым приводом РП-58.
Рулевой привод РП-57 (рис. 5.67)—однокамерный, необратимый гидроусилитель с жесткой обратной связью. Усилие, передаваемое рулевым приводом, создается давлением жидкости, подводимой от первой гидросистемы.
Основными частями рулевого привода являются корпусе 3, цилиндр 2, шток 1, золотник 8, входная качалка 13, тяга обратной связи 17, качалка обратной связи 16.
Распределитель 11 обеспечивает подвод и слив жидкости из рулевого привода. Сигнал для работы поступает на входную качалку 13 через дифференциальный
механизм, связывающий систему управления элеронов-интерцепторов с отклонением элеронов. Качалка, поворачиваясь относительно оси 0—0 передает усилие на золотник 8. Золотник открывает доступ жидкости из магистрали давления в одну из полостей цилиндра. В результате этого шток начинает перемещаться, отклоняя элерон-интерцептор. Из противоположной полости будет происходить слив жидкости.
269
Так как обратная связь соединена со штоком, то движение от него заставит повернуться входное звено относительно оси 0'—0'. В результате этого золотник 8 перекроет подачу жидкости, и отклонение элеронов-интерцепторов прекратится.
При отклонении штурвала по ходу часовой стрелки на 125° правый элерон отклоняется вверх на 20°, правый элерон-интерцептор также отклоняется вверх на 45° (левый элерон-интерцептор не отклоняется, оставаясь в нейтральном положении).
В случае возвращения отклоненного вверх элерона в нейтральное положение проводка системы управления элероном-интерцептором автоматически возвращается в нейтральное положение под действием усилия пружины 12 механизма обратной связи. Тогда золотник пропустит жидкость в другую полость цилиндра и шток, втягиваясь в цилиндр, установит элерон-интерцептор в нейтральное положение. В этом положении усилие предварительной затяжки пружины равно 35 кгс. Расчетное усилие обжатой пружины при отклоненном. элероне-интерцепторе вверх равно 50 кгс.
Рулевой привод РП-58 (рис. 5.68) аналогичен по конструкции и работе рулевому приводу РП-57. Однако у него отсутствует система обратной связи. Подача сигнала управления на рулевой привод РП-58 идет от тяг рулевого привода РП-57.
Усилие, передаваемое одним рулевым приводом РП-58, создается при работе второй гидросистемы, а усилие, передаваемое вторым, — при работе третьей гидросистемы.
На самолете установлено два комплекта рулевых приводов. Один управляет левым, второй — правым элероном-интерцептором. В каждый комплект входят один рулевой привод РП-57 и два рулевых привода РП-58.
Если в полете откажет один рулевой привод, то два других обеспечат нормальную работу элеронов-интерцепторов. В случае заедания золотника любого из приводов управляемость элеронов-интерцепторов сохраняется, так как вал заклинившегося золотника закручивается, не мешая работе управления двух других золотников. В этом случае обе полости отказавшего рулевого привода закольцовываются между собой, исключая создания гидроупора жидкостью.
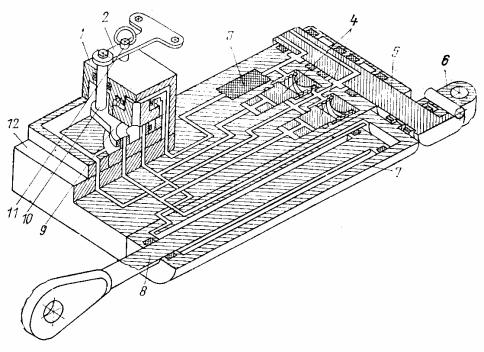
Рис. 5.68. Рулевой привод РП-58: 1—распределительное устройство; 2—рычаг; 3—фильтр; 4—перепускной клапан; 5—распределитель; 6—вилка; 7—цилиндр; 8—шток; 9—золотник;
10—вал; 11фиксатор; 12—корпус
270
Рычаги валов золотников 9 имеют отверстия для установки фиксатора 11 при нейтральном положении золотника. Данная возможность используется при регулировке управления элерона-ми-интерцепторами.
Корпусом рулевой привод крепится к лонжерону, штоком — к электронуинтерцептору.
По одному комплекту рулевых приводов установлено в левой и правой частях крыла, на заднем лонжероне между нервюрами № 24 и 26.
Рулевой привод РП-56В является силовым агрегатом, обеспечивающим отклонение руля высоты или руля направления.
Рулевой привод представляет собой трехкамерный, необратимый гидроусилитель с обратной связью. Усилие, передаваемое рулевым приводом, создается давлением жидкости, подводимой от первой, второй и третьей гидросистем. Каждая гидросистема питает только свою камеру рулевого привода.
Рулевой привод (рис. 5.69) состоит из цилиндра 16, корпуса 17, штока 14 с тремя поршнями, трех распределительных устройств 12, фильтра 7, перепускных клапанов в, золотника 10, ограничителя хода золотника 1.
Рис. 5.69. Рулевой привод РП-56В:
1—ограничитель; 2—входная качалка; 3, 4, 11—рычаги; 5—верхняя пята; 6—клапан; 7— фильтр; 8—кольцо; 9—нижняя пята; 10—золотник; 12—распределительное устройство; 13—вал; 14—шток; 15—серьга; 16—цилиндр; 17—корпус
Корпус имеет шесть штуцеров: три штуцера нагнетания и три слива в соответствующие гидросистемы. Цилиндр разбит на три полости, изолированные друг от друга. Через всё полости проходит один шток с тремя расположенными на нем поршнями. Входная качалка 2 передает движение на золотник через систему рычагов 3 и 4. Кроме того, входная качалка соединяется со штоком (входным звеном), образуя обратную связь агрегата.
Управляющий сигнал поступает на входную качалку 2. Она, поворачиваясь относительно оси, соединяющей ее со штоком, передает движение через рычаги 3, 4 к трем золотникам 10. Золотники соответственно открывают доступ жидкости в три полости силового штока.
Под действием усилий от давления жидкости шток начнет перемещаться и отклонять руль. Из трех противоположных полостей жидкость будет сливаться в баки своих гидросистем. При перемещении шток поворачивает входную качалку относительно точки входа. Качалка передает это движение через рычаги 3, 4 на золотники. Золотник,
271
вращаясь в обратную сторону, перекроет подачу жидкости в полости цилиндра. Слив жидкости также прекращается.
Запертая жидкость в полостях цилиндра будет удерживать руль в отклоненном положении. Если повернуть входную качалку на такой же угол в обратном направлении, то руль вернется в исходное положение.
Усилие, развиваемое на штоке при совместной работе трех гидросистем, равно 4100 кгс. При отказе одной гидросистемы усилие равно не менее 2600 кгс. Работая от одной гидросистемы, шток развивает усилие не менее 1000 кгс.
Рулевой привод обеспечивает отклонение рулей при отказе одной или двух гидросистем. При отказе двух гидросистем жидкость будет подаваться только в одну камеру цилиндра.
При заклинивании одного из золотников его вал 13, закручиваясь, не мешает работе рулевого привода. В этом случае полости отказавшего золотника закольцовываются между собой, не создавая препятствия движению штока. Перепускные клапаны предохраняют полости цилиндра от резкого повышения давления жидкости, сообщая полость повышенного давления с гидробаком.
Усилие на входную качалку поступает через тяги, связанные со штурвальной колонкой или пультом ножного управления. При работе системы АБСУ-154 усилие на качалку поступает от электрогидравлического агрегата РА-56В.
Рулевой привод системы управления рулем направления работает при подведенном давлении жидкости, равном 210 кгс/см2. В системе управления рулями высоты к рулевым приводам подается жидкость под давлением 125 кгс/см2. Корпусом рулевой привод крепится к каркасу киля или стабилизатора, а штоком — к рулю.
Всистеме управления рулями высоты установлено два рулевых привода. Они расположены на третьем лонжероне стабилизатора, в зоне нервюр № 11—12.
Всистеме управления рулем направления установлен один рулевой привод. Он расположен на третьем лонжероне киля.
Рулевой привод РП-55 (рис. 5.70) является силовым агрегатом, обеспечивающим отклонение элеронов.
Рулевой привод представляет собой трехкамерный необратимый гидроусилитель с обратной связью.
Усилие, передаваемое рулевым приводом, создается давлением жидкости, подводимой от первой, второй и третьей гидросистем, причем каждая гидросистема питает только свою камеру. По конструкции и работе он аналогичен рулевым приводам РП-56В, установленным в системах управления рулем высоты и рулем направления.
Усилие, развиваемое на штоке при работе трех гидросистем, равно 1500 кгс, при работе двух гидросистем не менее 1000 кгс и одной гидросистемы не менее 470 кгс.
Управление рулевым приводом ведется от штурвалов через жесткую проводку и от электрогидравлического рулевого агрегата РА-56В, работающего при включенной автоматической бортовой системе управления АБСУ-154.
Номинальное рабочее давление, подводимое к рулевому приводу, равно 210 кгс/см2.
Три штока рулевого привода, соединенные с тремя рычагами элерона, объединяются в общий узел. Корпус рулевого привода крепится к лонжерону у крыла.
Всистеме управления элеронами установлено два рулевых привода РП-55. Они расположены на третьем лонжероне между нервюрами № 37—38.
Рулевые агрегаты РА-56В являются исполнительными механизмами сервоприводов и предназначены для автоматического управления рулями от системы АБСУ-154. Конструкция и работа рулевого агрегата описываются в разделе «Спецоборудование самолета».
272