

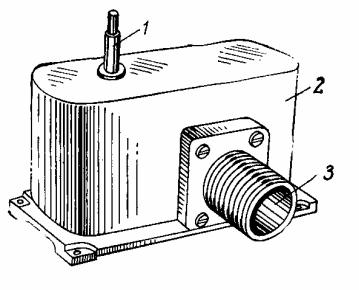
Рис. 3.18. Датчик ДПС-1:
1—входной валик; 2—корпус; 3—штепсельный разъем
При растяжении следящей тяги на ход, соответствующий углу отклонения руля высоты, равному 4°30', конусная часть штока будет нажимать на рычаг 15 и через него на концевой выключатель, разрывая электрическую цепь. При сжатии следящей тяги на тот же ход рычаг второго концевого выключателя будет сходить с большего на меньший диаметр штока, освобождая концевой выключатель от обжатия и разрывая электрическую цепь. Как при растяжении, так и при сжатии следящей тяги разрыв электрической цепи приведет к отключению режима автоматической стабилизации тангажа.
При перемещении колонок шток следящей тяги будет перемещаться на уборку или выпуск на соответствующие ходы. Триммирование усилий от загружателей будет одновременно приводить к изменению длины следящей тяги; обжатая тяга будет растягиваться, растянутая тяга — обжиматься.
Датчик ДПС-1 (рис. 3. 18) входит в комплект системы АБСУ-154 и служит для замера хода триммирующего электромеханизма. Барабан датчика соединен тросом КСАН- 1,8 с сектором рычага 7 (см. рис. 3. 14).
Датчик ДПС-2 (из комплекта системы АБСУ-154) служит для замера хода штока взлетно-посадочного пружинного загружателя. Датчик 4 (см. рис. 3.12) смонтирован на кронштейне-хомуте, закрепленном на резьбовом стакане пружинного загружателя. Выходной вал датчика соединен с входным валом редуктора 3, установленным на том же кронштейне-хомуте. На выходном валу редуктора с помощью шпонки смонтирован штампованный дуралюминовый рычаг, шарнир которого тягой-тандером соединен с шарниром ушкового наконечника пружинного загружателя. Конструкция датчика ДПС-2 аналогична конструкции датчика ДПС-1.
Установка датчиков ДПС-1 и ДПС-2 показана на рис. 3.12.
3.3. СИСТЕМА УПРАВЛЕНИЯ РУЛЕМ НАПРАВЛЕНИЯ
Система управления рулем направления предназначена для штурвального и автоматического управления самолетом по курсу и обеспечивает отклонение руля направления пилотами и рулевым агрегатом РА-56В-1 с помощью рулевого привода РП56.
Система управления рулем направления (рис. 3.19) состоит из педалей 8, одинарной жесткой проводки, взлетно-посадочного загружателя 9, электромеханизма триммерного эффекта 12, полетного загружателя 4, механизма включения полетного загружателя 3, рулевого агрегата 22, рулевого привода 26.
87
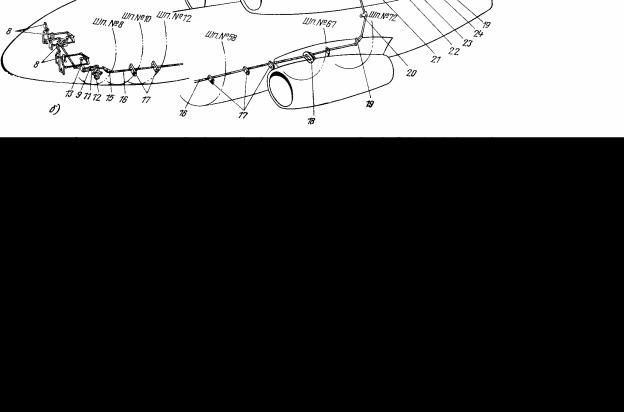
Рис. 3.19. Система управления рулем направления:
а—элементы системы управления в кабине пилотов; б—общий вид; 1, 6, 11, 16— тяги; 2—электромеханизм МП-100М-36 включения полетного загружателя; 3—механизм включения полетного загружателя; 4—полетный загружатель; 5—вал; 7—механизм регулировки педалей под рост пилота; 8—педали; 9—взлетно-посадочный загружатель; 10, 13, 19, 21, 27—качалки; 12—электромеханизм МП-100-27 триммерного эффекта загружателя; 14—рама пульта; 15, 29—ограничители отклонения руля направления; 17— направляющие тяг: 18—герметический вывод; 20, 28—поводки; 22—рулевой агрегат РА- 56В-1; 2,3—дифференциальная качалка; 24—центрирующая тяга; 25— руль направления; 26—рулевой привод РП-56
88
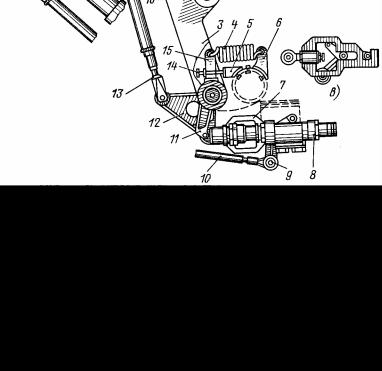
Рис. 3.20. Педали ножного управления:
а—расторможенное положение; б—заторможенное положение; в—стояночный тормоз включен; 1—педаль; 2—стойка; 3—штанга; 4—пружина; 5—упор; 6—ушко; 7—скоба; 8— редукционный клапан УГ-9272; 9, 12— качалки; 10—тяга стояночного тормоза; 11— нижний рычаг; 13—тяга; 14—регулируемый болт (упор); 15—верхний рычаг; 16—шарнир
Проводка системы управления передает движение от педалей и рулевого агрегата РА-56В-1 к входному рычагу рулевого привода РП-56. Проводка в носовой, центральной и хвостовой частях фюзеляжа выполнена аналогично проводке системы управления рулем высоты. К проводке системы управления относятся тяги 11, 16, направляющие тяг 17, качалки 19, 21, 27 и поводки 20, 28, качалки с упорами для ограничения отклонения руля направления 15, 29, дифференциальная качалка 23 и герметический вывод 18.
Педали служат для управления рулем направления и тормозами колес шасси. Педали установлены на пультах управления напротив каждого пилота и имеют механизмы регулировки под рост пилота. На педалях первого пилота смонтирован механизм стояночного торможения. Благодаря кинематической связи между педалями первого и второго пилотов управление может производиться одновременно обоими пилотами и раздельно — первым или вторым. Связь педалей левого и правого пультов осуществлена тягой 1, которая связывает качалки, жестко закрепленные на валах 5. Педали 1 (рис. 3.20) изготовлены из магниевого сплава МЛ5-Т4, причем они отлиты как одно целое с рычагами управления тормозами. Внешняя поверхность педали оклеена резиной. Педали своей нижней частью надеты на консольные оси, относительно которых они могут поворачиваться, и которые ввернуты в стойки 2 штанги 3 педалей. На нижней части штанги, по ее оси вращения, установлена качалка, состоящая из двуплечей качалки 12, верхнего 15 и нижнего 11 рычагов. Одно плечо двуплечей качалки соединено тягой 13 с рычагом педали 1, а другое — с тормозной скобой 7 механизма управления тормозами колес шасси.
К шарнирам 16 штанги 3 присоединяются тяги 3 (рис. 3.21), вторые концы которых присоединены к коромысловой качалке 5 механизма регулировки педалей под рост пилота.
89
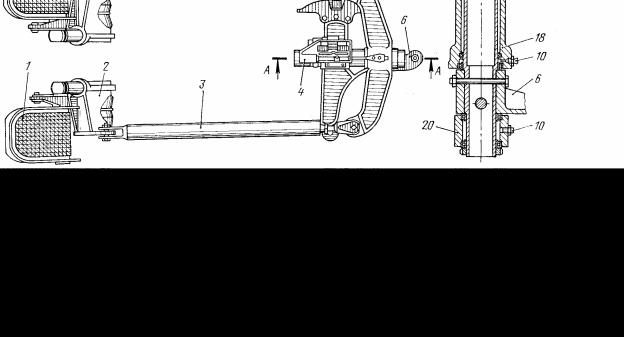
Рис. .3.21. Механизм регулировки педалей:
1—педаль; 2—основание; 3—тяга; 4—механизм концевых выключателей; 5— коромысловая качалка; 6—трехплечая качалка; 7—электродвигатель Д12Т-В; 8—втулка; 9—редуктор; 10—масленка; 11, 15—палец; 12—заглушка; 13—винт; 14—гайка; 16— стакан; 17—вал; 18—рама; 19—хомут; 20—рычаг механизма включения полетного загружателя
Механизм регулировки педалей смонтирован в стакане 16 (см. рис. 3.21),
соединенном с валом 17 с помощью шипа и паза. Вал 17 вращается в шарикоподшипниках, запрессованных в приливе на раме 18 пульта, и его ось является осью вращения качалки 5.
Механизм включает в себя винт 13 с трапециевидной резьбой, вращающийся на шарикоподшипниках, гайку 14 и коромысловую качалку 5, соединенную с гайкой 14 двумя стальными пальцами 11, 15. В стакане 16 имеются два продольных паза, в которых скользят пальцы при перемещении качалки 5 вдоль стакана. Перемещение качалки вдоль стакана осуществляется при помощи электродвигателя 7, выходной вал которого присоединен к переднему торцу винта 13 с помощью планетарного редуктора 9. Корпус электродвигателя закреплен на стакане хомутом 19. Управление каждым электродвигателем осуществляется переключателями, установленными на боковых панелях, которые расположены на обоих бортах кабины пилота. При отклонении переключателя от себя обе педали перемещаются в том же направлении, при отклонении на себя — в сторону пилота. Это достигается тем, что вращение винта 13 вызывает поступательное перемещение гайки 14 с жестко соединенной с ней качалкой 5 и, следовательно, одновременное перемещение обеих тяг 3, которые поворачивают штанги с педалями относительно оси вращения.
Общий ход коромысловой качалки 5 из одного крайнего положения в другое равен 50 мм, причем ход от себя равен 35 мм, а на себя — 15 мм. Это соответствует общему диапазону регулировки педалей, равному 135 мм, из которых 90 мм приходится на переднюю регулировку и 45 мм — на заднюю. Отсчет ведется от нейтрального положения педалей.
На самолетах последних модификаций общий ход коромысловой качалки равен 90 мм («а себя и от себя по 45 мм). Это соответствует диапазону регулировки педалей 180 мм и на переднюю и заднюю регулировку приходится по 90 мм.
90