

электромеханизм при этом сработает на выпуск штока. О нейтральном положении электромеханизма триммерного эффекта элеронов сигнализирует зеленое табло ТС-2 «Нейтраль—крен», установленное на средней приборной доске пилотов.
Следящая тяга служит для отключения режимов автоматической стабилизации крена при отклонении штурвала пилотом (см. рис. 3.27). Следящая тяга элеронов по своей конструкции однотипна со следящей тягой руля высоты (см. рис. 3.17) и отличается от нее только размерами одноименных деталей. Следящая тяга подвешена на двух ушках, прикрепленных на болтах к качалкам 14, 9 (см. рис. 3.27).
Установка концевых выключателей следящей тяги обеспечивает срабатывание их при ходах штока следящей тяги ±13 мм, что соответствует отклонению элеронов на углы
±3°45'.
Датчик ДПС-2 служит для замера обжатия пружинного загружателя. Датчик 11 с помощью кронштейна-хомута закреплен на стакане пружинного загружателя 13.
3.5. СИСТЕМА УПРАВЛЕНИЯ ЭЛЕРОНАМИ-ИНТЕРЦЕПТОРАМИ
Система управления элеронами-интерцепторами предназначена для их отклонения с целью повышения эффективности поперечного управления. Каждый элеронинтерцепторотклоняется только вверх с помощью рулевых приводов РП-57 и РП-58 после отклонения элерона на угол более—1°30'. Применение интерцепторов для повышения эффективности поперечного управления вызвано следующим. Для обеспечения высоких взлетно-посадочных характеристик на самолете использованы трехщелевые закрылки, размах которых на крыле для повышения их эффективности увеличен за счет уменьшения размаха элеронов.
Уменьшение размаха элеронов привело к уменьшению их эффективности. Это компенсировано применением внешних секций интерцепторов в качестве органов поперечною управления — элеронов-интерцепторов, которые отклоняются пропорционально углу отклонения элерона. Такая схема обеспечивает высокую эффективность поперечного управления. Система управления элеронами-интерцепторами состоит из дифференциальных механизмов 35 (см. рис. 3.27), жесткой проводки от дифференциального механизма до рулевых приводов 31. Проводка управления элеронами-интерцепторами включает тяги, поводки, пружинные тяги 34, ограничитель 33 отклонения элерона-интерцептора.
Управление элеронами-интерцепторами осуществляется штурвалами управления элеронами через дифференциальный механизм.
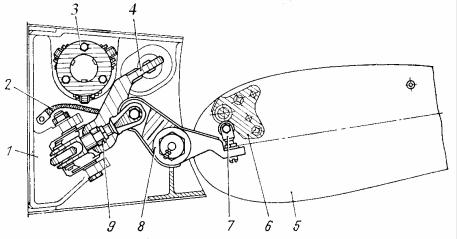
Дифференциальный механизм (рис. 3.33) служит для включения управления элероном-интерцептором. Он расположен на задней стенке третьего лонжерона крыла между нервюрами № 33— 34. На носке внутреннего торца элерона жестко закреплен упор 6, который входит в контакт с роликом вильчатого болта 7, ввернутого в качалку 8, имеющую ось вращения на кронштейне навески элерона 5. Второе плечо качалки 8 тягойтандером 9 соединено с качалкой 4, вращающейся в кронштейне 1. От второго плеча качалки 4 проводка идет к рулевому приводу РП-57.
Между упором 6 и роликом на болте 7 имеется зазор, соответствующий диапазону отклонения элерона вверх от 0° до —1°30'±15'. Начиная с угла отклонения элерона вверх, который равен 1°30'±15', и до предельного угла, равного 20°±1°, упор 6 будет находиться в постоянном контакте с роликом 7, отклоняя его вниз, благодаря чему будет происходить поворот качалки 8 и, следовательно, движение проводки на входной рычаг рулевого привода РП-57, который обеспечивает подачу сигнала рассогласования на два рулевых привода РП-58 и отклонение элерона-интерцептора вверх.
104
Рулевые приводы установлены между нервюрами № 24—26 (рис. 3.34). Входные звенья рулевых приводов РП-58 соединены между собой и входным звеном рулевого привода РП-57 тягами-тендерами. Рычаг 6 рулевого привода РП-57 в точке А соединен с проводкой управления.
Рис. 3.33. Дифференциальный механизм:
1—кронштейн; 2—перемычка металлизации; 3—направляющая тяги элеронов; 4— качалка; 5—элерон; 6—упор; 7—вильчатый болт с роликом; 8—качалка; 9—тяга-тандер
Проводка управления элеронами-интерцеиторами передает движение от дифференциального механизма до входного звена рулевого привода РП-57. В проводке используются нерегулируемые тяги, по конструкции аналогичные тягам проводки руля высоты. Маркировка на тягах выполнена так же, как и на тягах проводки управления элеронами.
105
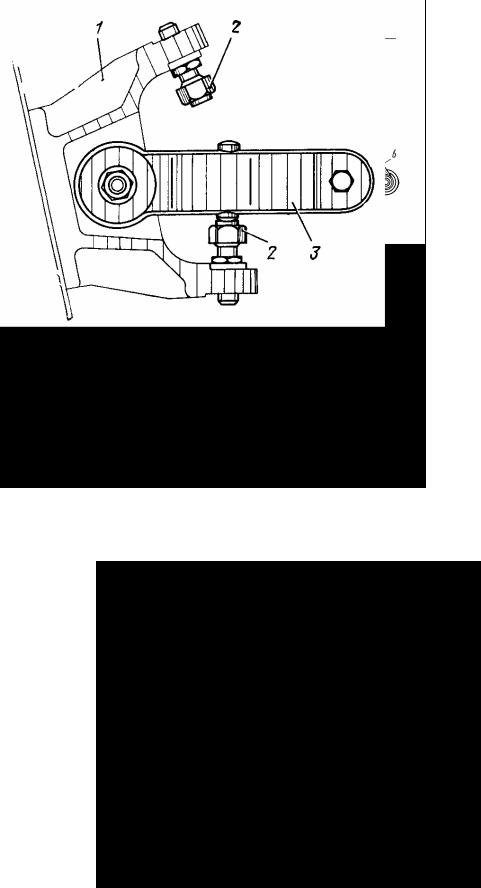
Рис. 3.34. Установка рулевых приводов РП-57 и РП-58 (на левом крыле). а—элерон-интерцептор закрыт; б—элерон-интерцептор открыт; 1, 4—рулевые приводы РП-58; 2—болт; 3—масленка; 5—рулевой привод РП-57; 6—входной рычаг рулевого привода РП-57
Рис. 3.35. Ограничители отклонения элерона-интерцептора: 1— кронштейн; 2—упор; 3—поводок
106