

При растяжении тяги обжатие пружины будет производиться вкладышем 10, при сжатии — вкладышем 7. В случае заклинивания одной половины руля высоты для отклонения второй пилоты вынуждены будут обжимать пружинную тягу, усилие от которой будет передано на колонки управления.
Герметический вывод предназначен для вывода проводок управления рулем высоты и рулем направления из герметического фюзеляжа в его негерметическую часть. Он установлен на задней стенке герметического шпангоута № 67а. Герметический вывод имеет корпус 1 (рис. 3.11), куда запрессованы две стальные обоймы 3, внутри которых вставлены сферические вкладыши 4, допускающие возможность свободной ориентировки внутренних корпусов 6, запрессованных в сферические вкладыши. Для устранения осевого перемещения сферические вкладыши затягиваются на внешней поверхности внутренних корпусов с помощью распорных втулок 5 и гаек 7.
Корпус 6 имеет три проточки, в которые устанавливаются войлочные уплотнения 8, 12 и резиновое кольцо 15, препятствующие попаданию в корпус пыли и влаги и обеспечивающие надежную герметизацию вывода. Войлочные уплотнения для создания необходимых зазоров затягиваются зажимными гайками 9 и 11. На внутренний корпус (со стороны герметического фюзеляжа) поставлен резиновый фланец 13, который крепится на корпусе хомутом 14, а фланцевая часть с помощью кольца закрепляется на обойме 3 штифтами 10.
Для смазки шаровых опор имеются две масленки 2.
Внутри корпусов 6 вставлены штоки тяг управления рулями. Штоки полированы и хромированы, благодаря чему достигается небольшое трение и достаточная герметичность.
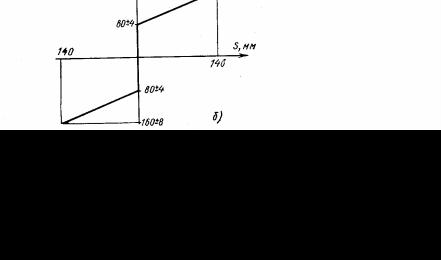
Рис. 3.10. Пружинная тяга руля высоты:
а—пружинная тяга; б—график работы пружинной тяги; 1, 15— наконечники; 2, 12— контргайки; 3—шток; 4, 5—гайки; 6—контровочная шайба; 7, 10—вкладыши; 8— пружина; 9—цилиндр; 11— стакан; 13—хвостовик; 14—труба
Для создания герметичности между фланцем гермовывода и кронштейном прокладывается уплотнительная лента, а контур корпуса промазывается тиоколовой замазкой. Доступ к герметическому выводу со стороны негерметической части фюзеляжа осуществляется через люки в вертикальной стенке заднего багажного помещения.
Проверка усилий трения в гермовыводе производится трижды на каждом штоке. Нагрузка для преодоления усилия трения прикладывается по оси штока. Максимальное допустимое отклонение динамометров от оси штока не должно превышать 3°.
Ограничение отклонения руля высоты обеспечивается упорами на узле управления 17 (см. рис. 3.1), расположенном на шпангоуте № 8, и на узле управления 27, расположенном на первом лонжероне киля. Упоры предназначены для ограничения
80
отклонения колонки и ограничения углов отклонения руля высоты от рулевого агрегата РА-56В-1.
Конструкция упоров узла управления на шпангоуте № 8 аналогична конструкции упоров узла на киле (см. рис. 3.4,6). В приливах кронштейна 2 установлено два регулируемых упора 6, в головки которых вставлены резиновые пробки для смягчения удара качалки по упорам. Регулировка упоров на шпангоуте № 8 должна обеспечивать отклонение руля высоты в пределах нормы при сохранении зазоров между трассой управления и конструкцией самолета. Регулировка упоров на киле должна обеспечивать такое положение поршня рулевого привода РП-56, при котором он не доходит до дна цилиндра на величину, соответствующую не менее 20' угла отклонения руля высоты.
Взлетно-посадочный пружинный загружатель. Имитация усилий от аэродинамической нагрузки на руле высоты осуществляется с помощью взлетнопосадочного пружинного загружателя 11 (см. рис. 3,1). Загружатель постоянно включен в систему управления как на земле, так и в полете.
Соединение загружателя с проводкой осуществляется следующим образом. На карданном валу 11 (рис. 3:12) закреплен двухушковый поводок 1; загружатель соединен с ушком поводка 1 и двуплечей качалкой 8, к которой, в свою очередь, подсоединен электромеханизм МЭТ-4Б-45 9. При отклонении колонки управления в любую сторону электромеханизм будет удерживать в неподвижном состоянии качалку 8, создавая тем самым неподвижную точку опоры для взлетно-посадочного загружателя. Отклонение поводка 1 карданного вала вызывает обжатие пружины загружателя, усилие от которой, передаваясь через карданный вал и колонку на штурвалы, создает имитацию аэродинамической нагрузки.
Рис. 3.11. Герметический вывод тяг управления рулями: а—конструкция герметического вывода; б—установка герметического вывода;
1—корпус; 2—масленка; 3—обойма; 4—вкладыш; 5—втулка; 6—внутренний корпус; 7— гайка; 8, 12—войлочные уплотнения; 9, 11—гайки; 10—штифт; 13—резиновый фланец; 14—хомут; 15—резиновое кольцо; 16—кронштейн; 17—шток РВ;
81
18—шток РН
Внутри цилиндра установлены два вкладыша 8, 12 (рис. 3.13). В кольцевые проточки вкладышей запрессованы фторопластовые втулки 7, 15. Через вкладыши пропущен шток 3. Во вкладыш 8 шток упирается своим кольцевым выступом, а во вкладыш 12—втулкой.
Сальник 4 исключает попадание влаги, пыли и механических частиц во внутрь цилиндра.
Между вкладышами расположена пружина 10. Пружина для повышения коррозионной стойкости покрыта смазкой ЦИАТИМ-201 и для центрирования колонки управления в нейтральном положении имеет предварительное обжатие 45 ± 2,5 кгс. При растяжении пружинного загружателя обжатие пружины производится вкладышем 12, при сжатии — вкладышем 8.
Полетный загружатель служит для ограничения отклонения руля высоты в полете. На режимах взлета и посадки он автоматически отключается от системы управления. Конструкция полетного загружателя аналогична конструкции взлетнопосадочного загружателя и одноименные детали обоих загружателей отличаются друг от друга только конфигурацией и размерами.
При установке в полетный загружатель пружина обжимается до усилия 415 ± 15 кгс. Полетный загружатель соединен с левым ушком поводка 1 (см. рис. 3.12) и рычагом 1 (рис. 3.14) механизма его включения.
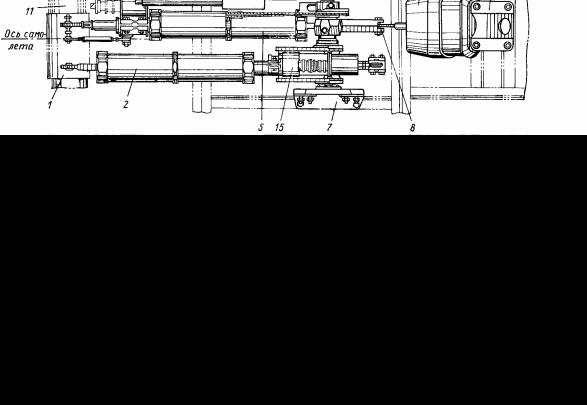
Рис. 3.12. Установка загружателей и следящей тяги руля высоты: 1—поводок; 2—полетный загружатель: 3—редуктор: 4—датчик ДПС-2; 5—
взлетно-посадочный загружатель- 6— датчик ДПС-1; 7, 10, 14— кронштейны; 8— двуплечая качалка; 9—электромеханизм МЭТ-4Б-45; 11—карданный вал; 12— одноушковый поводок; 13—следящая тяга; 15—механизм включения полетного загружателя МП-100МТ-40
82
Механизм включения полетного загружателя служит для включения полетного загружателя в систему управления руля высоты и отключения его автоматически или принудительно. В качестве привода механизма включения используется электромеханизм МП-100МТ-40 4. Управление этим электромеханизмом осуществляется автоматически или принудительно в зависимости от положения переключателя 5 (рис. 3.15), установленного на козырьке средней приборной доски пилотов. Этот переключатель служит также для управления электромеханизмом МП-100-30 канала курса. Переключатель может быть установлен в одно из трех фиксированных положений: «Автомат.», «Взлет — посадка» или «Полет». В положении переключателя «Автомат.» электромеханизм обеспечивает автоматическое включение полетного загружателя в систему управления рулем высоты при уборке закрылков и его отключение при их выпуске.
Рис. 3.13. Взлетно-посадочный загружатель руля высоты: а—загружатель; б—график работы загружателя;
1—наконечник; 2—контргайка; 3— шток; 4—сальник; 5—стакан; 6—штифт; 7, 15— фторопластовые втулки; 8, 12—вкладыши; 9—шайба; 10—пружина; 11—цилиндр; 13— крышка; 14—гайка
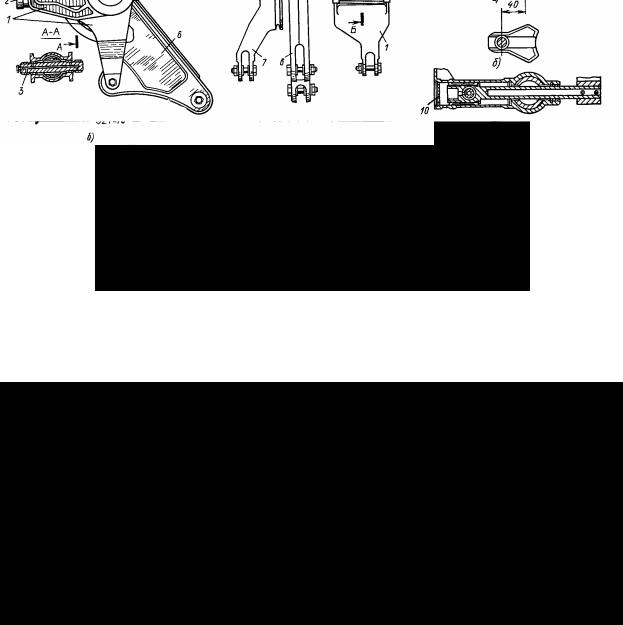
Рис. 3.14. Механизм включения полетного загружателя руля высоты: а—отключен; б—включен; 1-рычаг с щеками; 2—цилиндр; 3—палец; 4—электромеханизм
МП-100МТ-40; 5—рычаг; 6—качалка; 7—рычаг с сектором; 8—вал; 9—поршень со штоком; 10—заглушка
83
В положении переключателя «Взлет — посадка» электромеханизм принудительно отключает полетный загружатель от системы управления.
При отказе автоматического включения для принудительного включения полетного загружателя переключатель должен быть установлен вположение «Полет».
Механизм включения полетного загружателя имеет рычаг 1 (см. рис. 3.14), к которому подсоединяется полетный загружатель. Боковые стенки рычага развиты в две щеки с фасонными отверстиями. Рычаг установлен на стальном валу 8 на двух подшипниках, что обеспечивает ему вращение относительно вала. Между щеками рычага на валу с помощью двух болтов закреплен цилиндр 2, в верхней части которого находится ушко в виде вилки. На боковых поверхностях вилки имеются два продольных сквозных паза. Через эти пазы проходит палец 3, запрессованный в поршень 9. Консольные части пальца с насаженными на них втулками находятся в плоскости щек рычага 1. В цилиндре 2 размещен поршень 9 со штоком, на конце которого закреплен рычаг 5. К рычагу 5 кренится ушко электромеханизма МП-100МТ-40 4. Корпус электромеханизма шарнирно соединен с ушком цилиндра 2
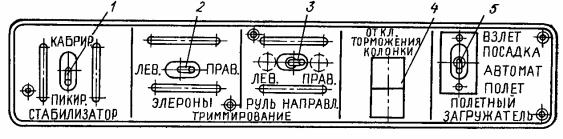
Рис. 3.15. Козырек средней приборной доски пилотов: 1—переключатель ЗППНТ-К управления электромеханизмом МУС-ЗПТВ; 2—
переключатель ПНГ-15К управления электромеханизмом триммерного эффекта элеронов; 3-переключатель ПНГ-15К управления электромеханизмом триммерного эффекта руля направления- 4—переключатель ВГ-15 устройства торможения колонки МВД-45- 5—переключатель ЗППНТ-К механизмов включения полетных загружателей руля высоты и руля направления
При выпуске (уборке) штока электромеханизма перемещается рычаг 5, соединенный со штоком поршня 9.
На валу 8 с заделанными по его концам наконечниками, предназначенными для опоры вала на конструкции самолета, закреплены рычаг 7 и двуплечая качалка 6. Рычаг служит для подсоединения следящей тяги. Правая часть рычага развита в сектор для подключения в систему управления датчика ДПС-1.
Кмалому плечу двуплечей качалки подсоединен взлетно-посадочный загружатель,
ак большому— электромеханизм триммирования МЭТ-4Б-45.
На рис. 3.14 показано положение механизма, при котором шток электромеханизма 4 убран (что соответствует убранным закрылкам), палец 3 находится в наиболее узком месте отверстий на щеках рычага 1, где зазоры между ним и кромками отверстий соответствуют ходам колонки управления на себя и от себя до ±60—±80 мм и углу отклонения руля высоты ±8°—9°. При дальнейшем отклонении колонки палец, пройдя зазор, упрется в окантовку отверстия и отклонит рычаг 1, что вызовет обжатие полетного загружателя и приведет к увеличению усилия на колонке управления. Чем больше поворот вала, тем больше будет обжатие загружателя и, следовательно, усилие на
колонке. При выпуске штока электромеханизма на 40 мм (за время 27+−46 с) шток поршня 9
с пальцем 3 переместится в правую сторону на 40 мм. В этом положении зазоры между пальцем и окантовкой отверстий на щеках соответствуют полному отклонению колонки на себя и от себя. Поэтому при отклонении колонки палец не будет доходить до кромки
84