

1—корпус; 2—крышка; 3—сердечник; 4—болт; 5—гайка; 6—трос (трубка условно не показана)
Рис. 3.39. Установка рулевого привода РП-59 (на правом крыле, нервюра 16): а—интерцептор закрыт; б—интерцептор открыт;
1, 3—масленки; 2—рулевой привод; 4, 9— болты; 5—входное звено; 6—регулируемая тяга; 7—шарнир; 8—качалка
Для уборки интерцепторов достаточно нажать на верхнюю часть рукоятки и перевести ее вперед по направлению полета до упора, где стопор автоматически войдет в конусный паз сектора и застопорит рукоятку. При установке интерцепторов в убранное положение и при установке штоков рулевых приводов на замки гаснет табло на средней приборной доске пилотов и прекращается подача питания к рулевому приводу. Если хотя бы один рулевой привод РП-59 не встал на замок, о чем сигнализирует летчику то же световое табло, то питание подается ко всем рулевым приводам, пока рулевой привод не встанет на замок.
В случае отказа гидросистемы при выпущенном положении интерцепторов гидравлическое питание отключается кнопкой 21 (см. рис. 2.6), расположенной на средней приборной доске пилотов. Аварийная уборка интерцепторов осуществляется под действием аэродинамической нагрузки со скоростью 3 град/с, а также может осуществляться пилотом при перемещении рукоятки управления интерцепторами в крайнее переднее положение. Интерцепторы при этом уберутся до углов 1,7°—2°. В процессе уборки и в убранном положении интерцепторы демпфируются рулевыми приводами.
3.7. СИСТЕМА УПРАВЛЕНИЯ СТАБИЛИЗАТОРОМ
111
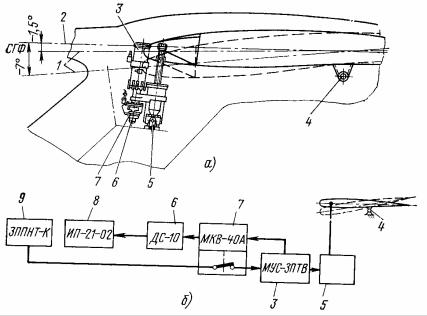
На самолете применен переставляемый стабилизатор, что позволяет эксплуатировать самолет с более передней центровкой на взлете и посадке при сохранении требуемых запасов углов отклонения руля высоты и без увеличения усилий на штурвале. Система управления стабилизатором изменяет угол положения стабилизатора относительно строительной горизонтали фюзеляжа (СГФ) от —1°30' до —7°.
В процессе эксплуатации применяются два положения стабилизатора: основное (полетное) —1°30' и взлетно-посадочное — 7°.
Система управления стабилизатором состоит из электромеханизма МУС-ЗПТВ 3 (рис. 3.40), подъемника 5, переключателя 9, индикатора положения стабилизатора 8.
Рис. 3.40. Принципиальная схема управления стабилизаторам:
а—схема перестановки стабилизатора; б—блок-схема управления стабилизатором; 1— хорда стабилизатора: 2—линия, параллельная СГФ; 3—электромеханизм МУС-ЗПТВ; 4— ось вращения; 5—подъемник; 6—датчик ДС-10; 7—механизм концевых выключателей МКВ-40А; 8—индикатор положения стабилизатора ИП21-02; 9—переключатель управления
Электромеханизм МУС-ЗПТВ (рис. 3.41) служит для приведения в действие системы управления стабилизатором. В электромеханизме имеются два электродвигателя переменного тока, связанных между собой через редуктор с суммирующим дифференциалом. Реверсирование осуществляется путем переключения фаз обмоток электродвигателей.
112
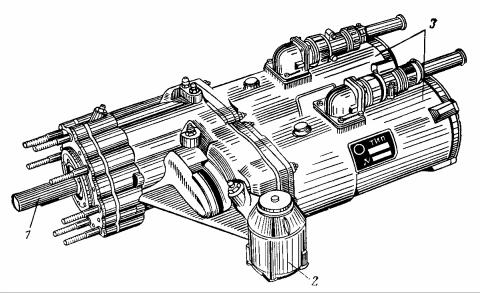
Рис. 3.41. Электромеханизм управления стабилизатором МУС-ЗПТВ: 1—выходной вал; 2—руной привод; 3—электродвигатель
Питаются электродвигатели от разных электроцепей. В каждый электродвигатель встроена электромагнитная муфта сцепления — торможения, которая питается от сети постоянного тока. В случае выхода из строя одного электродвигателя или его отключения электромагнитная муфта стопорит кинематическую цепь этого электродвигателя. При этом другой электродвигатель обеспечивает прежнюю величину рабочего момента на выходном валу, но с меньшей вдвое скоростью. При выключении электромеханизма МУС-ЗПТВ система управления стабилизатором стопорится тормозными электромагнитными муфтами электродвигателей.
Вращение от электродвигателей передается через дифференциал, суммирующий вращение двух одновременно работающих электродвигателей, и затем через фрикционную муфту на выходной вал 1 электромеханизма. Фрикционная муфта предохраняет электромеханизм, а также систему управления стабилизатором от перегрузки.
В случае перегрузки выходного вала фрикционная муфта будет пробуксовывать, ограничивая крутящий момент, развиваемый приводным валом. Для регулировки и проверки системы управления стабилизатором на земле при обесточенном состоянии обоих электродвигателей перемещение стабилизатора может осуществляться вручную посредством съемной рукоятки ручного привода 2. Момент на рукоятке ручного привода при перекладке стабилизатора не более 0,1 кгс·м. Запас хода подъемника при крайних положениях стабилизатора (—1°30' и —7°) составляет не менее 72 оборотов ручного привода электромеханизма МУС-ЗПТВ.
Подъемник стабилизатора предназначен для преобразования вращения выходного вала электромеханизма МУС-ЗПТВ в возвратно-поступательное движение винта для отклонения стабилизатора. Подъемник установлен с помощью кронштейна на торцевой нервюре киля. Винт подъемника посредством болта соединен с кронштейном, закрепленным на переднем лонжероне стабилизатора.
Ведущая шестерня 6 (рис. 3.42) состыкована одним концом с электромеханизмом МУС-ЗПТВ; а другим — с механизмом концевых выключателей МКВ-40А. Ведомая шестерня 7 соединена с гайкой 8. Внутри гайки 8 перемещается винт 9. Винтовая пара имеет трапецеидальную резьбу. Для повышения надежности винт подъемника дублирован расположенным внутри его стержнем 10. В крайних положениях ход винта ограничивается упорами 2, 5. Подъемник присоединяется к узлам крепления на киле и
113
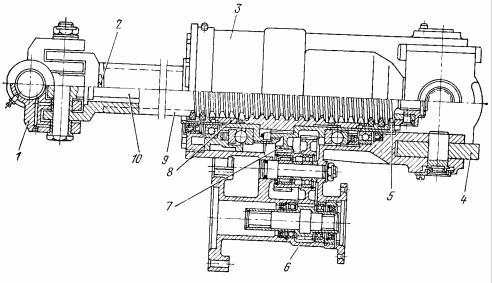
стабилизаторе посредством карданных узлов 1, 4. Электромеханизм МУС-ЗПТВ приводит во вращение гайку 8. Винт подъемника 9, перемещаясь в гайке 8, отклоняет стабилизатор.
Управление стабилизатором осуществляется переключателем 1 (см. рис. 3.15), колпачок блокировки которого имеет разные варианты. Перестановка стабилизатора в полетное положение производится переводом переключателя в положение «Пикир.», а перестановка во взлетно-посадочное положение — переводом переключателя в положение «Кабрир.».
На самолетах последних выпусков управление стабилизатором осуществляется в автоматическом или ручном режиме. Режим управления стабилизатором определяется положением колпачка переключателя ручного управления, установленного на электрощитке козырька средней приборной доски пилотов.
При закрытом колпачке включены цепи автоматического управления и выключены цепи ручного управления. При открытом колпачке выключены цепи автоматического управления и включены цепи ручного управления.
В автоматическом режиме управление стабилизатором осуществляется совместно с управлением закрылками при перемещении рукоятки для выпуска или уборки закрылков. При повороте рукоятки управления закрылками из положения 0° на любой угол одновременно с выпуском закрылков на заданный рукояткой угол происходит перестановка стабилизатора во взлетное положение —3° (по индикатору) при нейтральном положении переключателя ручного управления.
Перестановка стабилизатора в посадочное положение —5°30' осуществляется перестановкой переключателя ручного управления стабилизатором в положение «Кабрир.» при закрытом колпачке. При этом перестановка стабилизатора будет происходить при углах отклонения закрылков не менее 31°.
Рис. 3.42. Подъемник стабилизатора:
1, 4—карданные узлы; 2, 5—упоры; 3—корпус; 6—ведущая шестерня; 7—ведомая шестерня; 8—гайка; 9—винт; 10—стержень
При установке рукоятки управления закрылками в положение 0° одновременно с уборкой закрылков происходит перестановка стабилизатора в полетное положение 0°(по индикатору) независимо от положения переключателя ручного управления стабилизатором.
При открытии колпачка переключателя ручного управления в процессе перестановки стабилизатора в автоматическом режиме при нейтральном положении переключателя система обесточивается и стабилизатор останавливается.
114