

4 Додавання двох паралельних сил
Теорема
Дві паралельні сили і , які направлені в один бік, мають рівнодійну, яка напрямлена в той же бік і за модулем дорівнює сумі цих сил. Лінія дії рівнодійної поділяє відстань між лініями дій заданих сил на частини, які обернено пропорційні величинам сил і .
Для
доведення даної теореми розглянемо
тверде тіло(на рис. 13 не показано), до
якого прикладено дві паралельні сили
![]() і
,
які направлені в один бік (рис. 13, а).
і
,
які направлені в один бік (рис. 13, а).
З’єднаємо
дві точки
і
прямою лінією і прикладемо в даних
точках дві рівні за величиною і протилежні
за напрямом сили
![]() і
і
![]() ,
які напрямлені вздовж прямої
.
Такі дві сили, оскільки, вони взаємно
зрівноважуються згідно з аксіомою 2, не
змінюють стану тіла. За правилом
паралелограма попарно додамо сили (рис.
13, б)
,
які напрямлені вздовж прямої
.
Такі дві сили, оскільки, вони взаємно
зрівноважуються згідно з аксіомою 2, не
змінюють стану тіла. За правилом
паралелограма попарно додамо сили (рис.
13, б)
![]() ,
,
![]() .
.
Отримані
рівнодійні
![]() і
перенесемо
вздовж лінії їх дії в точку
(це також не змінить стану тіла, оскільки
сила є ковзним вектором), де розкладемо
їх на початкові складові (рис. 13, в)
і
перенесемо
вздовж лінії їх дії в точку
(це також не змінить стану тіла, оскільки
сила є ковзним вектором), де розкладемо
їх на початкові складові (рис. 13, в)
![]() ,
,
![]() .
.
Сили і , прикладені в точці , взаємно зрівноважуються і їх можна відкинути, не змінюючи стану тіла. Залишаються дві сили і , які прикладені в точці , напрямлені вздовж однієї прямої в один і той же бік. Додаючи ці дві сили, одержимо їх рівнодійну , яка має величину, що дорівнює сумі їх величини
![]()
і напрямлена вздовж тієї ж прямої і в той же бік.
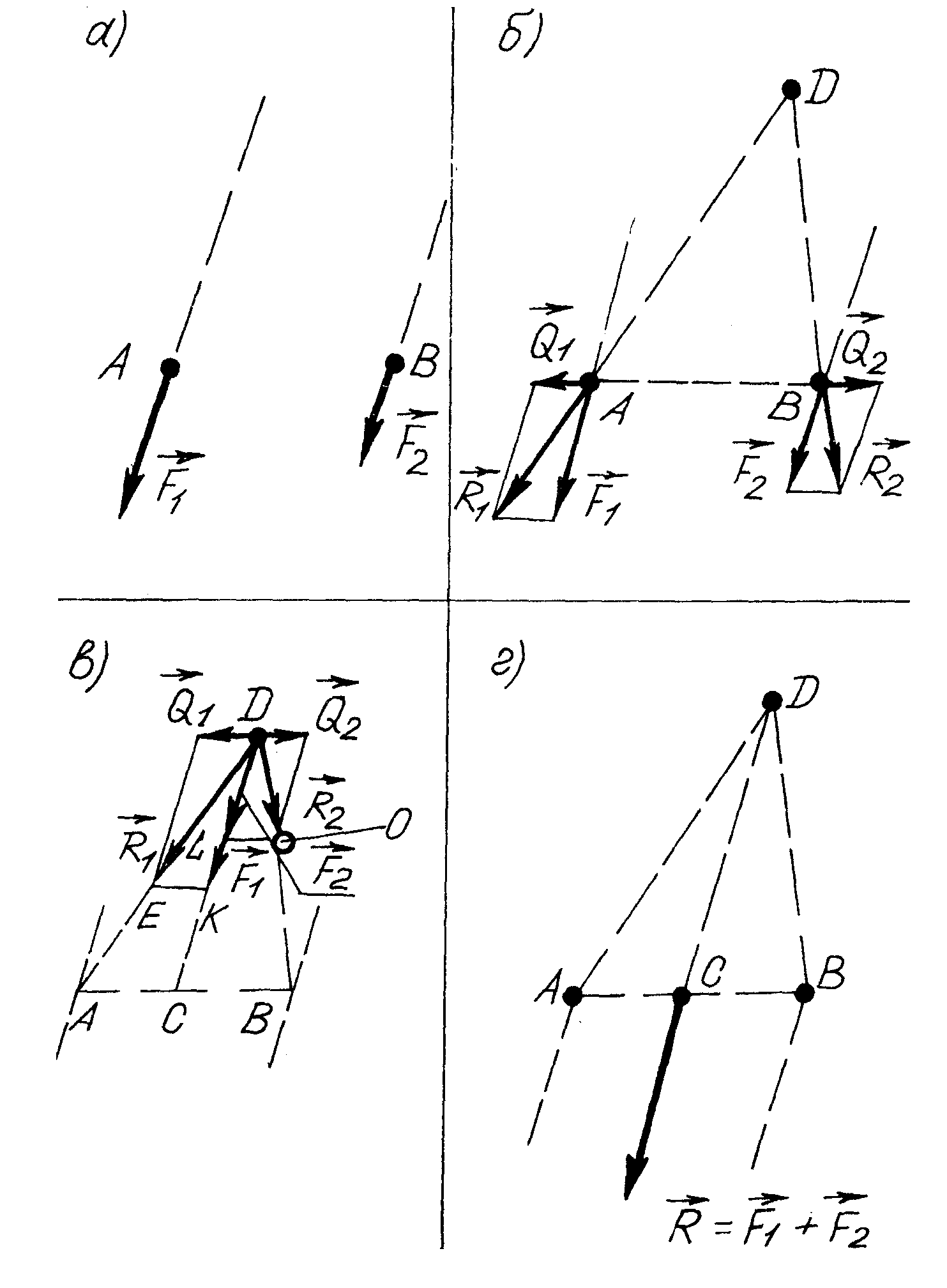
Рис. 13
Отже, сили і (рис. 13, а) мають рівнодійну, величина якої дорівнює сумі сил і , паралельна до них і напрямлена в той же бік (рис. 13, г).
Тепер
визначимо, де проходить лінія дії
рівнодійної, тобто визначимо положення
точки
перетину цієї лінії з відрізком
.
Для цього співставимо трикутники
![]() і
і
![]() ,
,
![]() і
і
![]() .
Вони є попарно подібними, тобто:
.
Вони є попарно подібними, тобто:
![]()
![]() ,
,
![]()
![]() .
.
З подібності трикутників маємо
![]() ,
,
![]() .
.
Звідси
![]() ,
,
![]() .
.
Оскільки
![]() ,
то остаточно отримаємо
,
то остаточно отримаємо
![]() ,
,
тобто
![]() .
.
Отже, точка поділяє відрізок на частини, які обернено пропорційні величинам сил.
Таким чином, теорема доведена.
Аналогічно, що пропонується читачу проробити самостійно, можна довести і таку теорему:
дві
не рівні за модулем паралельні сили
і
,
які напрямлені в протилежні боки, мають
рівнодійну, напрям якої співпадає з
напрямом більшої сили, а модуль її
дорівнює різниці модулів складових
сил
і
.
Лінія дії рівнодійної поділяє відстань
між лініями дії складових сил зовнішнім
чином на відрізки, які обернено пропорційні
величинам цих сил, тобто, якщо
![]() ,
то
,
то
![]() ,
і
точка
знаходиться за межами відрізка
з боку більшої сили, як вказано на рис.
14.
,
і
точка
знаходиться за межами відрізка
з боку більшої сили, як вказано на рис.
14.

Рис. 14
5 Доведення теореми про еквівалентність пар сил
Доведення
теореми 1.
Для
доведення теореми 1 (див. §17) розглянемо
пару сил
![]() з плечем
,
яка розміщена в площині рисунка, і
довільно розміщений відрізок
з плечем
,
яка розміщена в площині рисунка, і
довільно розміщений відрізок
![]() (рис. 15, а).
(рис. 15, а).
Покажемо,
що задану пару сил
,
не змінюючи стану тіла, на яке вона діє,
можна перенести так, щоб її плече
збігалося з відрізком
.
Для цього в точках
і
перпендикулярно до відрізка
прикладемо по дві сили
і
,
![]() і
,
які задовольняють умові
і
,
які задовольняють умові
![]() ,
і лінії дії їх продовжимо до перетину
з лініями дії сил
,
і лінії дії їх продовжимо до перетину
з лініями дії сил
![]() .
Внаслідок перетину отримуємо ромб
.
Внаслідок перетину отримуємо ромб
![]() (рис. 15, б). Прикладання сил
,
,
і
не
змінить стану тіла, оскільки ці сили
попарно зрівноважуються.
(рис. 15, б). Прикладання сил
,
,
і
не
змінить стану тіла, оскільки ці сили
попарно зрівноважуються.
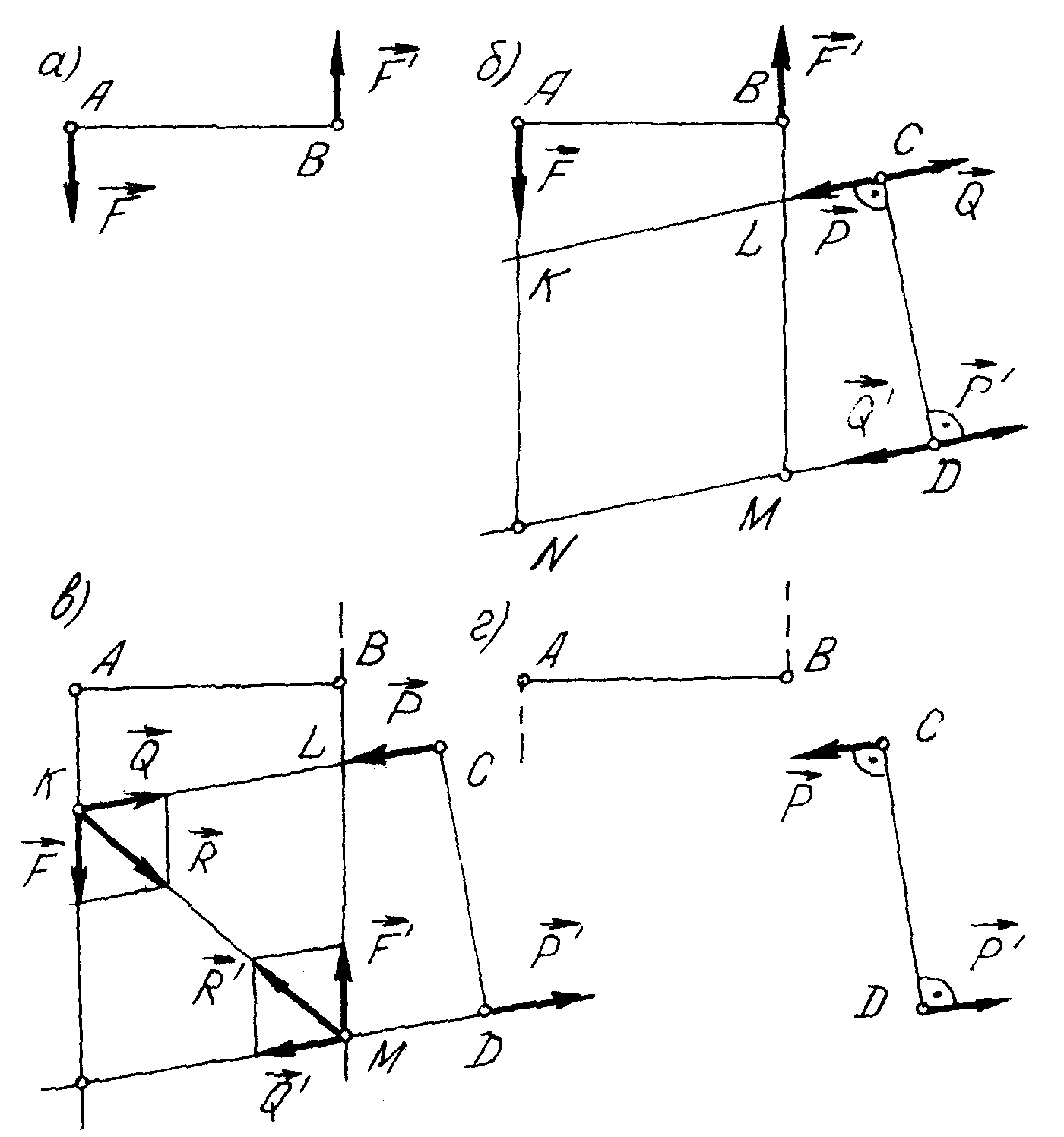
Рис. 15
Сили , , і перенесемо вздовж ліній їх дій відповідно в точки і і попарно їх додамо (рис. 15, в)
![]() ,
,
![]() .
.
Враховуючи
те, що
,
,
отримаємо, що
.
До того ж рівнодійні
і
![]() будуть напрямлені вздовж діагоналі
будуть напрямлені вздовж діагоналі
![]() ромба
,
бо сили
,
,
,
рівні за модулем і при їх додаванні
отримується ромб. Таким чином, сили
і
дорівнюють одна одній за величиною і
діють вздовж однієї прямої в протилежні
боки (рис. 15, в). Отже, вони взаємно
зрівноважуються і їх, не змінюючи стану
тіла, можна виключити.
ромба
,
бо сили
,
,
,
рівні за модулем і при їх додаванні
отримується ромб. Таким чином, сили
і
дорівнюють одна одній за величиною і
діють вздовж однієї прямої в протилежні
боки (рис. 15, в). Отже, вони взаємно
зрівноважуються і їх, не змінюючи стану
тіла, можна виключити.
Після
всіх цих дій залишаються сили
і
,
які прикладені в точках
і
(рис. 15, г). Сили
і
рівні за модулем, паралельні і протилежні
за напрямом, отже вони утворюють пару
сил. Оскільки
![]() ,
,
то можна вважати, що отримана пара сил
,
,
то можна вважати, що отримана пара сил
![]() є не що інше, як пара сил
,
яка перенесена з початкового положення
в потрібне положення
і це перенесення не змінило стану тіла.
є не що інше, як пара сил
,
яка перенесена з початкового положення
в потрібне положення
і це перенесення не змінило стану тіла.
Доведення
теореми 2.
Для доведення другої теореми припустимо,
що дано пару сил
з плечем
,
яка знаходиться в площині
![]() ,
і задано деяку площину
,
і задано деяку площину
![]() ,
яка паралельна площині
(рис. 16, а). Доведемо що задану пару сил
,
не змінюючи стану тіла, на яке вона діє
(тіло на рис. 16 не зображено), можна
перенести в площину
.
Для цього з точок
і
проведемо паралельні прямі, точки
перетину яких з площиною
,
яка паралельна площині
(рис. 16, а). Доведемо що задану пару сил
,
не змінюючи стану тіла, на яке вона діє
(тіло на рис. 16 не зображено), можна
перенести в площину
.
Для цього з точок
і
проведемо паралельні прямі, точки
перетину яких з площиною
![]() позначимо
і
.
В отриманих точках перпендикулярно до
відрізка
в протилежних напрямах прикладемо по
дві сили
і
,
і
,
які задовольняють умові
(рис. 16, б). Оскільки прикладені сили
попарно зрівноважуються, то їх прикладання
не змінить стану тіла.
позначимо
і
.
В отриманих точках перпендикулярно до
відрізка
в протилежних напрямах прикладемо по
дві сили
і
,
і
,
які задовольняють умові
(рис. 16, б). Оскільки прикладені сили
попарно зрівноважуються, то їх прикладання
не змінить стану тіла.
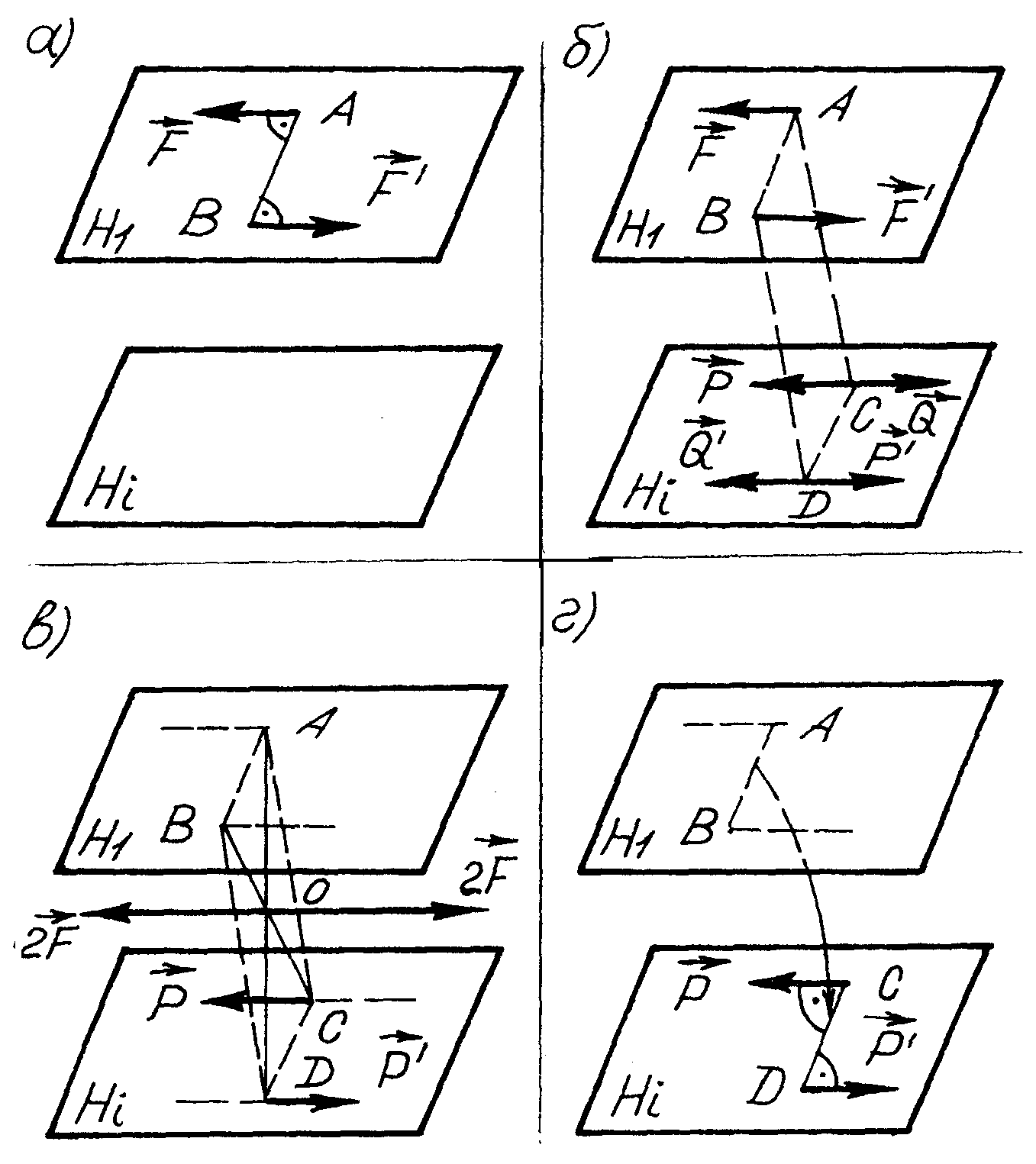
Рис. 16
Додаємо
силу
і
.
Оскільки ці сили рівні, паралельні і
напрямлені в один бік, то їх рівнодійна
дорівнює за величиною
![]() ,
їм паралельна і напрямлена в той же бік.
Точка її прикладання поділяє відрізок
,
їм паралельна і напрямлена в той же бік.
Точка її прикладання поділяє відрізок
![]() навпіл. Точно так само, додаючи сили
і
,
які прикладені відповідно в точках
і
,
одержимо їх рівнодійну, яка за величиною
дорівнює
їм паралельна і напрямлена в той же бік,
що й ці сили. Точка прикладання цієї
рівнодійної поділяє навпіл відрізок
(рис. 16, в). Відрізки
і
поділяються навпіл в точці перетину
,
бо вони є діагоналлю паралелограма
навпіл. Точно так само, додаючи сили
і
,
які прикладені відповідно в точках
і
,
одержимо їх рівнодійну, яка за величиною
дорівнює
їм паралельна і напрямлена в той же бік,
що й ці сили. Точка прикладання цієї
рівнодійної поділяє навпіл відрізок
(рис. 16, в). Відрізки
і
поділяються навпіл в точці перетину
,
бо вони є діагоналлю паралелограма
![]() .
Таким чином, обидві рівнодійні, які
рівні за величиною і протилежні за
напрямом, прикладені в одній точці
(рис. 16, в). Отже, вони взаємно зрівноважуються
і їх можна виключити.
.
Таким чином, обидві рівнодійні, які
рівні за величиною і протилежні за
напрямом, прикладені в одній точці
(рис. 16, в). Отже, вони взаємно зрівноважуються
і їх можна виключити.
Залишаються
сили
і
,
які рівні за величиною, протилежно
напрямлені і паралельні (рис. 16, г), тобто
становлять пару сил з плечем
.
Оскільки
![]() ,
,
![]() ,
,
то можна вважати, що отримана пара сил
є не що інше, як пара сил
,
яка перенесена з площини
в паралельну площину
і це перенесення не змінило стану тіла.
,
,
то можна вважати, що отримана пара сил
є не що інше, як пара сил
,
яка перенесена з площини
в паралельну площину
і це перенесення не змінило стану тіла.
Доведення
теореми 3.
Для доведення третьої теореми розглянемо
пару сил
![]() з плечем
з плечем
![]() ,
яка діє на тверде тіло (тіло не зображено
на рисунку) в площині рисунка (рис, 17,
а). На лінії дії сили
,
яка діє на тверде тіло (тіло не зображено
на рисунку) в площині рисунка (рис, 17,
а). На лінії дії сили
![]() вибираємо довільну точку
і, використовуючи те, що сила є ковзним
вектором, перенесемо силу
в цю точку (рис.17, б). Сили
вибираємо довільну точку
і, використовуючи те, що сила є ковзним
вектором, перенесемо силу
в цю точку (рис.17, б). Сили
![]() і
і
![]() розкладемо
на дві складові
розкладемо
на дві складові
![]() ,
,
![]()
так,
що сили
і
![]() розміщені перпендикулярно до відрізка
,
а сили
і
– вздовж цього відрізка (рис. 17, в).
розміщені перпендикулярно до відрізка
,
а сили
і
– вздовж цього відрізка (рис. 17, в).
Позначимо
![]() ,
тоді
,
тоді
![]() ,
,
![]() ,
як кути з відповідно перпендикулярними
сторонами. З прямокутних
,
як кути з відповідно перпендикулярними
сторонами. З прямокутних![]() і
і
![]() маємо
маємо
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
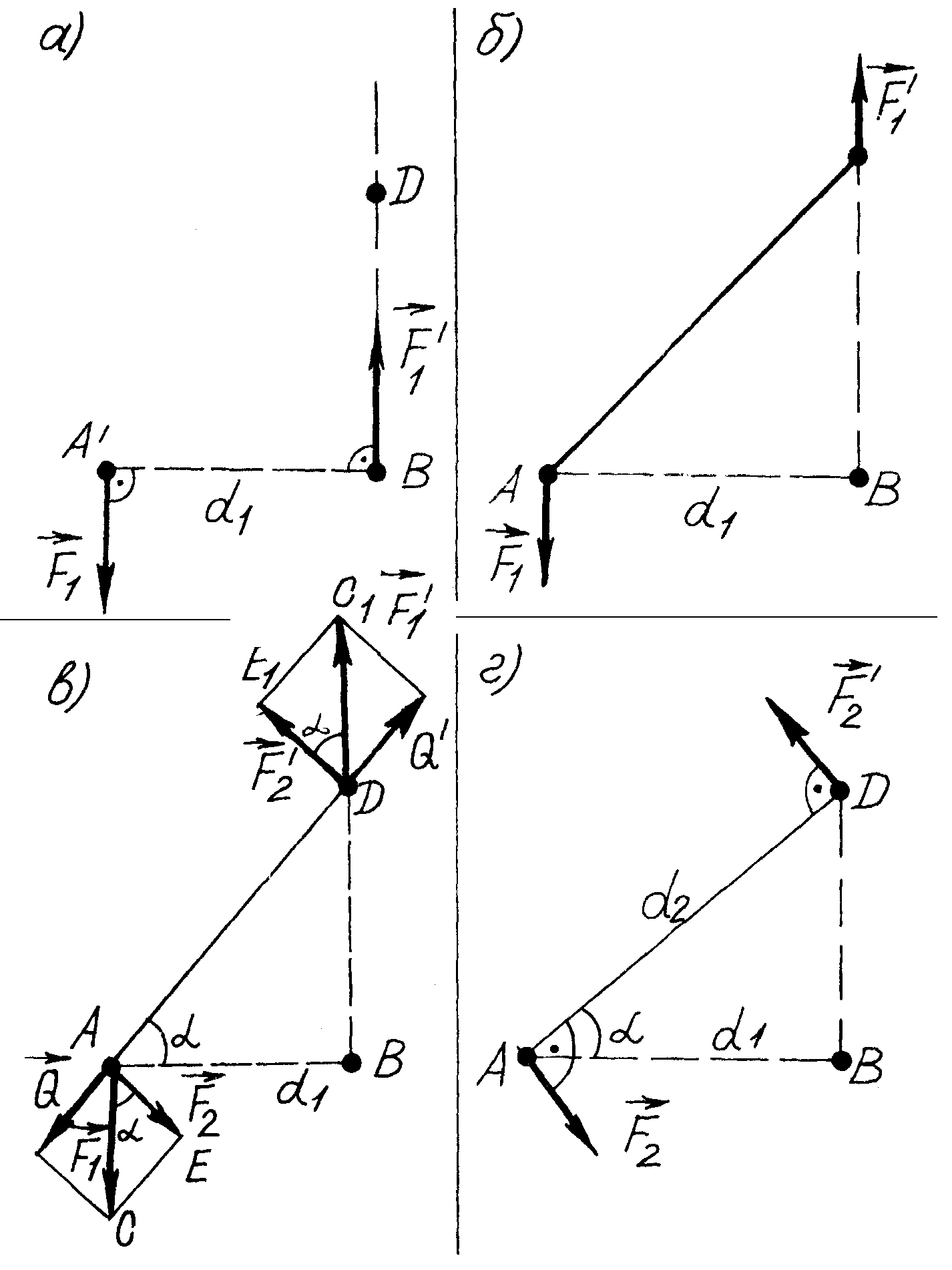
Рис. 17
Оскільки
![]() ,
то
,
то
![]() ,
,
![]() .
.
Сили і , які діють вздовж однієї прямої в протилежні боки, зрівноважуються і їх, не змінюючи стану тіла, можна виключити.
Після
виключення сил
і
залишаються сили
і
,
які рівні за величиною, протилежно
напрямлені і паралельні (рис. 17, г), тобто
утворюють пару сил з плечем
![]() .
Отримана пара сил
.
Отримана пара сил
![]() діє на тверде тіло так само, як задана
пара сил
,
бо всі перетворення, які були проведені
з силами, не змінювали стану тіла.
Визначимо момент отриманої пари сил
діє на тверде тіло так само, як задана
пара сил
,
бо всі перетворення, які були проведені
з силами, не змінювали стану тіла.
Визначимо момент отриманої пари сил
![]() .
.
З
![]() маємо
маємо
![]() .
.
Враховуючи,
що
![]() ,
а
,
а
![]() ,
отримаємо
,
отримаємо
![]() .
.
Отже пари сил, які однаково діють на тверде тіло, мають рівні за величиною і однакові за знаком моменти. Тобто, не змінюючи дії пари сил на тіло, можна змінювати модулі сил і плече цієї пари, але так, щоб її момент і напрям обертання залишались незмінними.