

§ 43 Обертання твердого тіла навколо нерухомої осі
Р
Рис. 98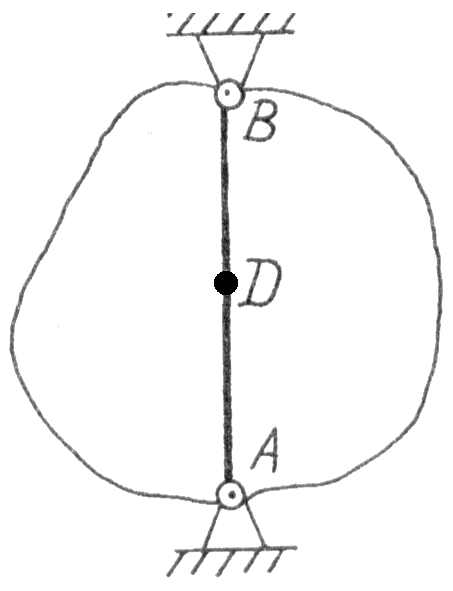
![]() (рис. 98).
(рис. 98).
Тоді з формули (2.31)
![]()
отримуємо,
що
![]() тобто
тобто
![]() .
.
Виберемо
тепер на прямій
довільну точку
,
для якої вектор
![]() ,
де
– деяке число. За формулою (2.31) визначимо
швидкість точки
,
де
– деяке число. За формулою (2.31) визначимо
швидкість точки
![]() ,
або
,
або
![]()
Оскільки
![]() ,
,
![]() – число, то отримуємо, що
– число, то отримуємо, що
![]() .
Точка
на прямій
вибрана довільно, а це означає, що пряма
є геометричне місце точок, швидкості
яких дорівнюють нулеві, тобто є віссю
обертання.
.
Точка
на прямій
вибрана довільно, а це означає, що пряма
є геометричне місце точок, швидкості
яких дорівнюють нулеві, тобто є віссю
обертання.
Отже,
обертанням твердого тіла навколо нерухомої осі називається такий його рух, при якому хоча б дві точки тіла є нерухомими.
В
Рис. 99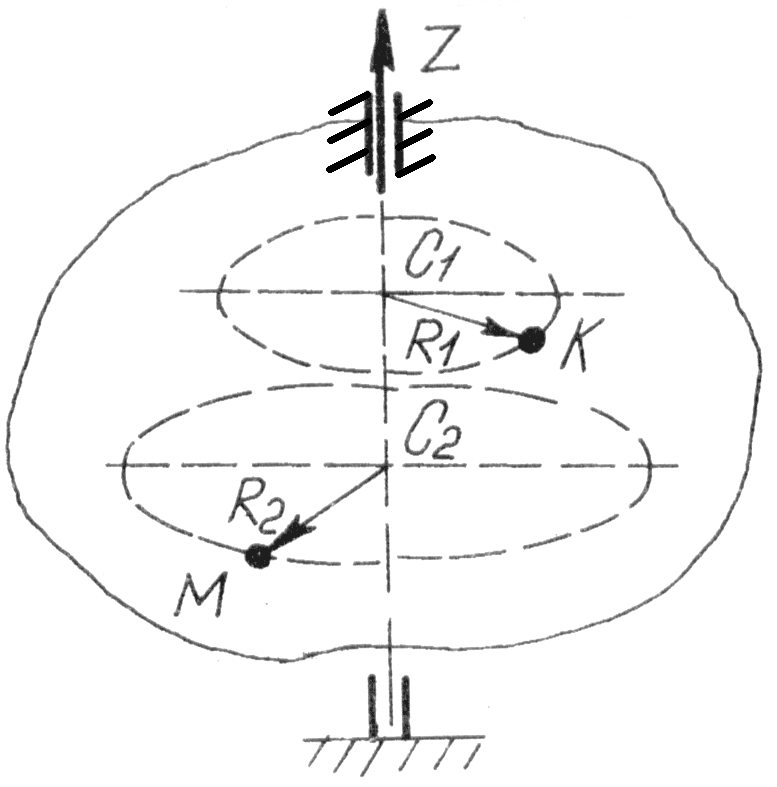
![]() Точки тіла, які не належать осі обертання
(наприклад, точка
і
(рис. 99), очевидно, рухатимуться по колах,
площини яких перпендикулярні до осі
обертання, а центри їх знаходяться на
осі обертання. Радіуси цих кіл
Точки тіла, які не належать осі обертання
(наприклад, точка
і
(рис. 99), очевидно, рухатимуться по колах,
площини яких перпендикулярні до осі
обертання, а центри їх знаходяться на
осі обертання. Радіуси цих кіл
![]() і
і
![]() визначають відстані відповідних точок
до осі обертання.
визначають відстані відповідних точок
до осі обертання.
§ 43.1 Рівняння обертання тіла навколо нерухомої осі
Розглянемо
тверде тіло, яке обертається навколо
нерухомої осі (рис. 100). Для визначення
положення тіла через вісь обертання
проведемо дві півплощини: нерухому
і рухому
,
яка жорстко з’єднана з тілом, тобто
положення і рух її в
Рис. 100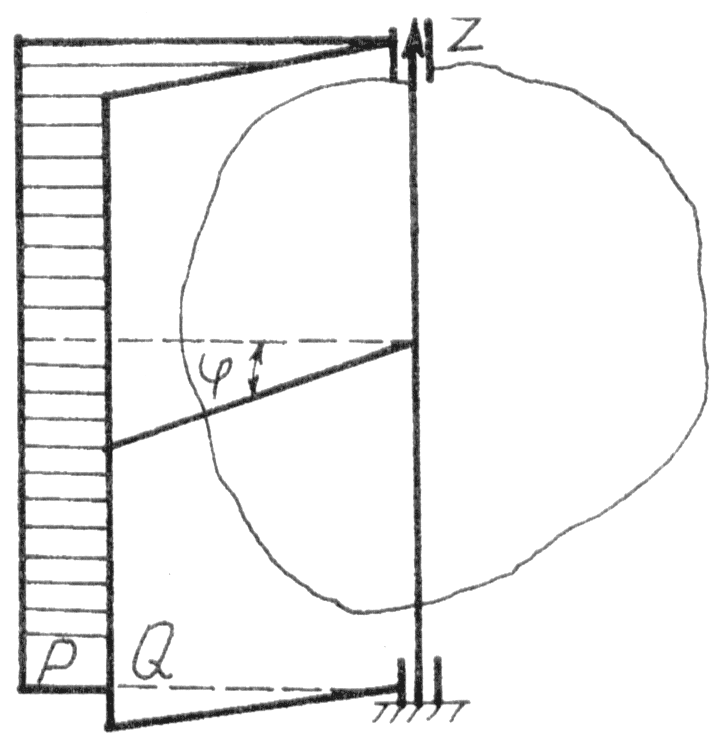
![]() (2.34)
(2.34)
Записане рівняння називається рівнянням (законом) обертання твердого тіла навколо нерухомої осі, бо, знаючи це рівняння, можна визначати положення тіла в будь-який момент часу.
Кут повороту вимірюється в радіанах і вважається додатним, якщо він відкладається проти ходу годинникової стрілки, коли дивитися з кінця осі обертання.
Перша похідна за часом від кута повороту називається алгебраїчною кутовою швидкістю.
Вона
позначається буквою
![]() (омега)
(омега)
![]() (2.35)
(2.35)
Перша похідна за часом від алгебраїчної кутової швид-кості називається алгебраїчним кутовим пришвидшенням.
Кутове
пришвидшення позначається буквою
![]() (епсилон).
(епсилон).
![]() (2.36)
(2.36)
Модулі
алгебраїчної кутової швидкості і
кутового пришвидшення позначаються
![]() ,
,
![]() і будемо називати їх просто кутовою
швидкістю
і кутовим
пришвид-шенням.
На рисунках алгебраїчну кутову швидкість
і кутове пришвидшення
показують дуговими стрілками, додатний
напрям
яких вибирають проти ходу годинникової
стрілки, якщо дивитись з кінця осі
обертання.
і будемо називати їх просто кутовою
швидкістю
і кутовим
пришвид-шенням.
На рисунках алгебраїчну кутову швидкість
і кутове пришвидшення
показують дуговими стрілками, додатний
напрям
яких вибирають проти ходу годинникової
стрілки, якщо дивитись з кінця осі
обертання.
Кут повороту , кутова швидкість і кутове пришвид-шення є кінематичними характеристиками обертання твердого тіла навколо нерухомої осі.
З’ясуємо одиниці вимірювання цих величин. В теоретичній механіці, як і у фізиці та в більшості інших дисциплін, кут повороту найчастіше вимірюється в радіанах (рад), тобто:
![]()
Тоді згідно з формулою (2.35) кутова швидкість буде вимірюватись в рад/с, тобто:
![]()
а кутове пришвидшення
![]()
У
техніці кут повороту тіла визначають
в обертах. Кількість обертів найчастіше
позначають буквою
![]() .
Оскільки за один оберт тіло повертається
на
.
Оскільки за один оберт тіло повертається
на
![]() радіан, то за
обертів воно повертається на кут
радіан, то за
обертів воно повертається на кут
![]() рад.
(2.37)
рад.
(2.37)
Кутову
швидкість у техніці часто характеризують
числом обертів за хвилину (об/хв) і
позначають буквою
.
В паспортах кожного двигуна внутрішнього
згоряння, електродвигуна вказане
експлуатаційне число обертів за хвилину.
Зв’язок між
![]() і
визначається формулою
і
визначається формулою
![]()
тобто
![]() (2.38)
(2.38)
Залежність (2.38) – це формула переходу від кутової швидкості в обертах за хвилину до кутової швидкості в радіанах за секунду. Цю формулу бажано запам’ятати, бо вона часто застосовується в реальних розрахунках і не треба її плутати з формулою
![]() ,
(2.39)
,
(2.39)
де
![]() – частота обертання тіла, тобто кількість
обертів тіла за одну секунду, яка також
часто зустрічається в технічній
літературі.
– частота обертання тіла, тобто кількість
обертів тіла за одну секунду, яка також
часто зустрічається в технічній
літературі.