

§ 16 Пара сил і її момент
Система
двох рівних за величиною протилежно
напря-млених
сил (![]() ),
лінії дії яких не співпадають, називається
парою
сил
(рис. 29).
),
лінії дії яких не співпадають, називається
парою
сил
(рис. 29).
Рис. 29 |
Рис. 30 |
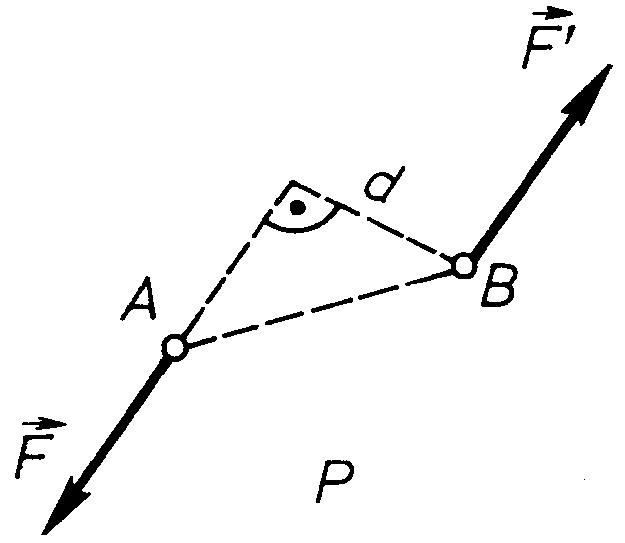
Основними характеристиками пари сил є:
1.
Площина
дії пари сил
– це площина, в якій знаходиться пара
сил. На рис. 29, на якому зображено пару
сил
![]() ,
– це площина дії заданої пари сил. Вона
єдина, оскільки через дві паралельні
лінії можна провести тільки одну площину.
,
– це площина дії заданої пари сил. Вона
єдина, оскільки через дві паралельні
лінії можна провести тільки одну площину.
2.
Плече
пари сил
– це найкоротша відстань між лініями
дії сил пари. На рис. 29 воно позначено
літерою
![]() .
.
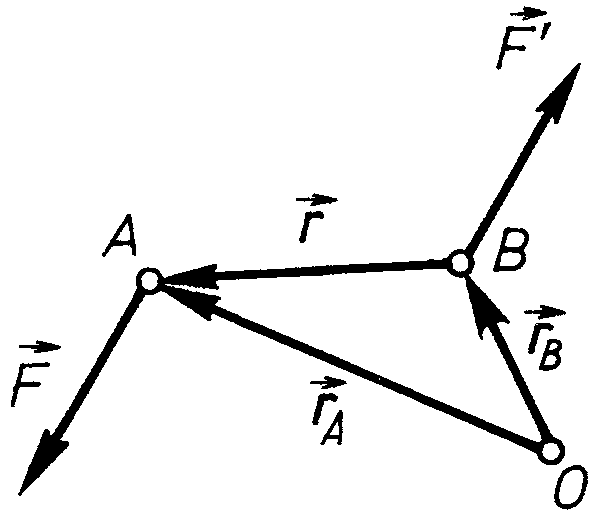
3. Момент пари сил.
Для
введення поняття моменту пари сил
розглянемо пару сил
,
сили якої прикладені в точках
і
(рис. 30). Виберемо довільну точку
і проведемо відповідні радіуси-вектори
![]() .
За формулою (1.26) визначимо головний
вектор пари сил
.
За формулою (1.26) визначимо головний
вектор пари сил
![]() .
.
Отже, головний вектор пари сил дорівнює нулеві.
За формулою (1.27) визначимо головний момент пари сил відносно довільної точки
![]() .
.
Оскільки , отримаємо
![]() ,
,
тобто:
![]() .
.
Головний момент пари сил не залежить від положення точки, відносно якої він визначається, а залежить тільки від параметрів самої пари сил і називається моментом пари сил.
Отже,
момент
пари сил
![]() дорівнює
векторному моменту однієї сили пари
відносно точки прикладання іншої сили
даної пари, тобто
дорівнює
векторному моменту однієї сили пари
відносно точки прикладання іншої сили
даної пари, тобто
![]() .
(1.34)
.
(1.34)
З отриманого випливає:
1. Момент пари сил – це вектор, бо вектором є момент сили відносно точки.
2.
Вектор моменту пари сил перпендикулярний
до площини дії пари, оскільки вектор
![]() перпендикулярний до площини, яка
проходить через точку
і вектор сили
,
а це є площина дії пари сил.
перпендикулярний до площини, яка
проходить через точку
і вектор сили
,
а це є площина дії пари сил.
3. Якщо побудувати вектор (рис. 31, а), а це згідно з формулою (1.34) буде вектор моменту пари сил, то ми отримаємо, що момент пари сил як вектор напрямлений в бік, звідки спостерігач бачить намагання пари сил повернути тіло проти руху годинникової стрілки.
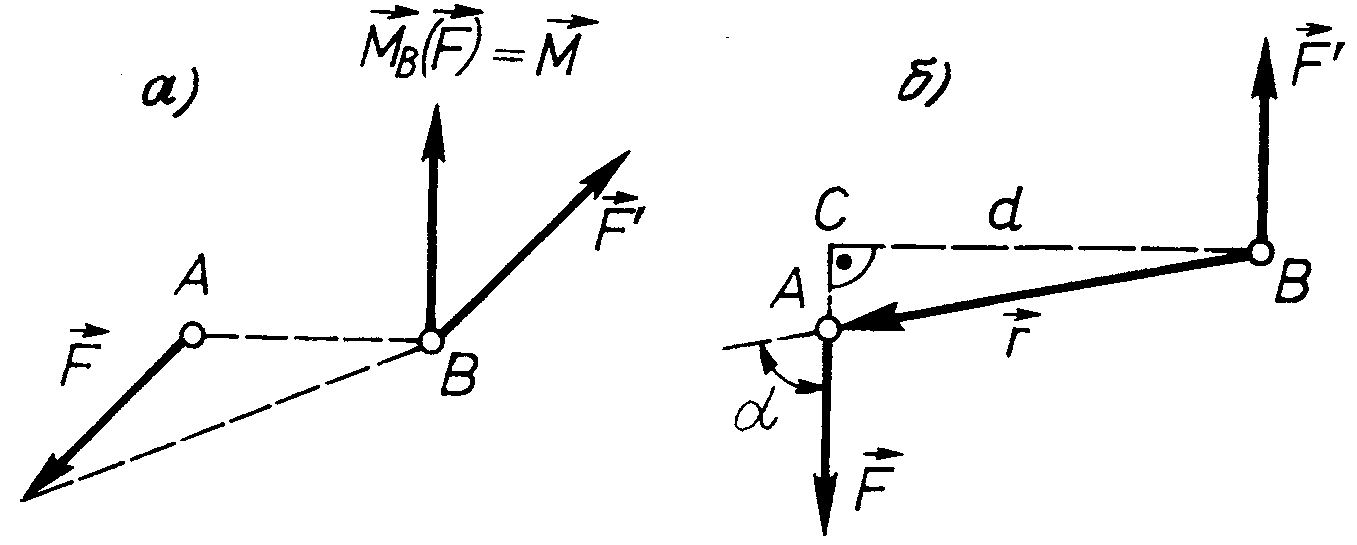
Рис. 31
Визначимо величину вектора моменту пари сил. За формулою (1.34) маємо
![]() .
.
Оскільки (див. рис. 31, б)
![]() ,
,
отримуємо
![]() .
(а)
.
(а)
Отже,
момент пари сил чисельно дорівнює добутку модуля однієї сили пари на її плече.
Якщо пари сил розміщені в одній площині, то величини їх моментів знаходяться за формулою (a), а вектори цих моментів будуть колінеарними. В цьому випадку доцільніше користуватися не векторним поняттям моменту пари сил, а алгебраїчним.
Алгебраїчний момент пари сил дорівнює добутку, взятому з відповідним знаком, модуля однієї сили пари на її плече, тобто
![]() .
(1.35)
.
(1.35)
Той чи інший знак у цій формулі визначається за таким правилом: якщо спостерігач бачить намагання пари сил повернути тіло проти годинникової стрілки, береться знак “+”, в противному разі – знак “–“.
Алгебраїчні моменти пари сил на рисунках показують дуговими стрілками (рис. 32).
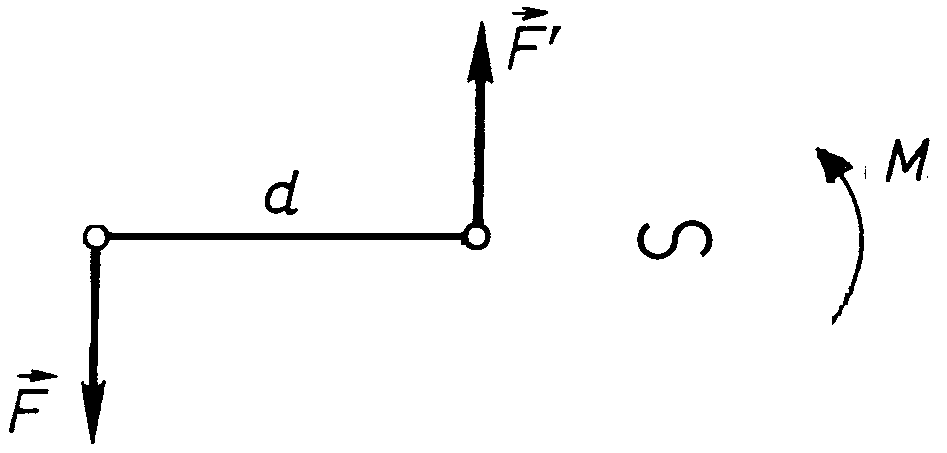
Рис. 32
Зазначимо, що одиницею виміру моменту пари сил, як і моменту сили, є Нм.
§ 17 Еквівалентність пар сил
Тут будуть тільки сформульовані (без відповідних доведень) теореми, які нададуть нам можливість виконувати певні дії над парами сил. З доведенням даних теорем можна ознайомитись в додатку 4.
Теорема 1.
Дія пари сил на тверде тіло не зміниться, якщо пару сил в площині її дії перемістити в будь-яке положення (рис. 33).
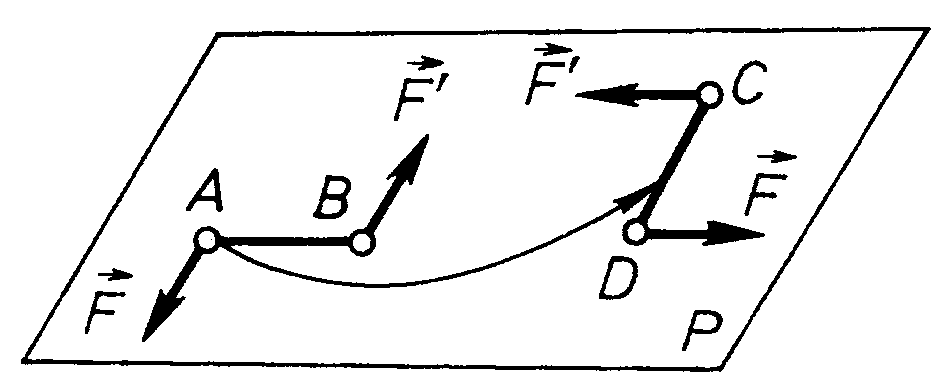
Рис. 33
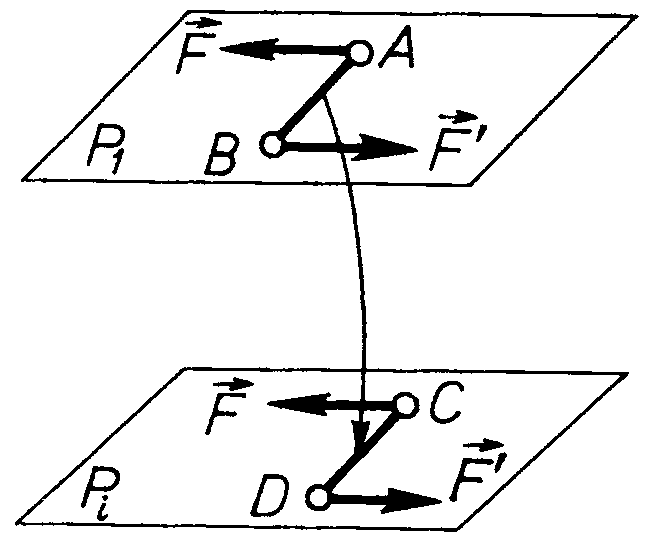
Теорема 2.
Дія пари сил на тверде тіло не зміниться, якщо пару сил перемістити в площину, яка паралельна площині дії пари сил (рис. 34).
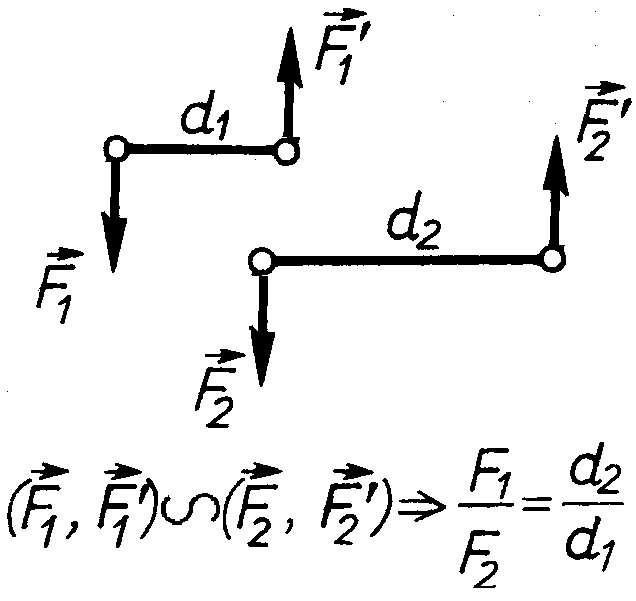
Теорема 3.
Дія пари сил на тверде тіло не зміниться, якщо змі-нити сили пари і плече пари, залишивши без змін момент пари.
Для
пар сил, показаних на рис. 35,
![]() і
і
![]() .
З рівності
.
З рівності
![]() випливає, що для еквівалентних пар сили
обернено пропорційні їх плечам.
випливає, що для еквівалентних пар сили
обернено пропорційні їх плечам.
Сформульовані три теореми можна об’єднати в одну:
пари сил, моменти яких геометрично рівні, є еквівалентними
![]() .
(1.36)
.
(1.36)
Рівність
(1.36) є необхідною і достатньою умовою
еквівалентності двох пар сил з моментами
![]() і
і
![]() .
.
Рис. 34 |
Рис. 35 |
На основі сформульованих теорем бачимо, що над парою сил, як елементом статики, можна виконувати такі дії:
пару сил можна переносити в площині її дії, включаючи і її поворот на будь-який кут;
пару сил можна переносити в будь-яку площину, яка паралельна площині дії заданої пари сил;
можна змінювати силу пари і її плече, не змінюючи моменту пари.
Виходячи зі сказаного та математичної класифікації векторів (вільний, невільний, ковзний), вектор моменту пари сил належить до вільного вектора.