

Переход от дифференциального уравнения порядка nк системе изn-дифференциальных уравнений 1-го порядка
Такой переход позволяет единообразно исследовать системы любого порядка, что имеет важное значение, например, при моделировании на ЭВМ, в этом случае проще использовать стандартные матричные операции, чем иметь дело с дифференциальными уравнениями разных порядков.
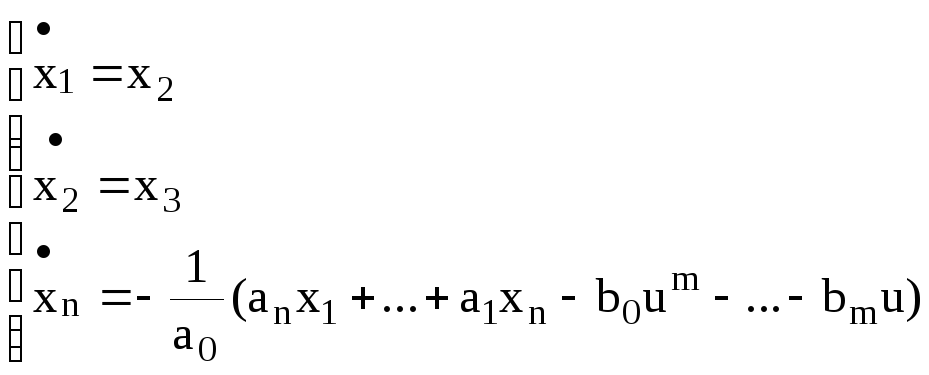
Вводим
дополнительные переменные (x1……xn),
равные производным y(t):
![]()
Перепишем уравнение (5): y(n)= -1/a0 (a1y(n-1) +…+any - b0u(m) -…-bmu).
Очевидно, что имеет место следующая система из n уравнений:
Начальные условия для y(t) переходят в начальные условия для (x1……xn).
Для выражения выходной величины преобразуем (6) в векторно-матричную
систему с выходом. Отметим для этого, что настоящий выход объекта y(t) равен х1. Можно ввести вектор-строку из n компонент: с=(1 0 0 0 …0), при этом х1= ст (х1 …….х n)= 1х1+0х 2 + …….+0х n.
Теперь система дифференциальных уравнений (6) может быть записана в матричном виде следующим образом:

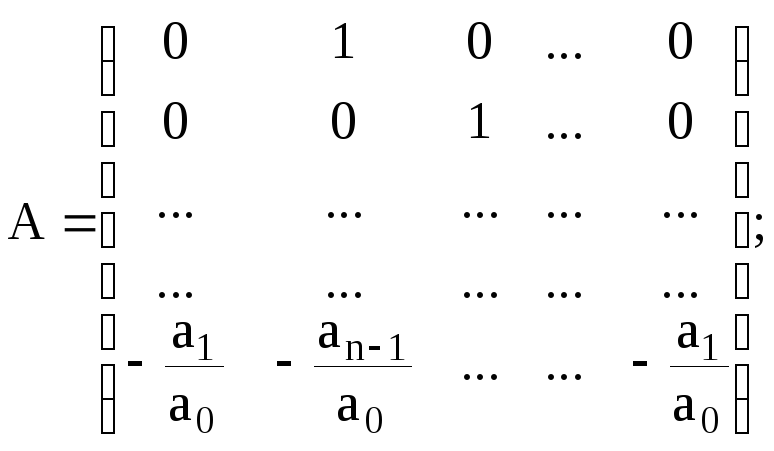
![]()

Решение системы уравнений (7) всегда может быть записано в следующем виде (Формула Коши, интеграл Дюамеля):
![]()
Здесь первое слагаемое – общее решение однородного уравнения, второе – частное неоднородного. Формула (8) справедлива вне зависимости от порядка исходного дифференциального уравнения.
В правую часть уравнения (7) и формулы (8) входят производные от управляющего воздействия. Можно показать, что от этих производных можно избавиться. Они будут вычисляться “автоматически” в процессе решения системы уравнений, и выглядит это следующим образом. Нужно вместо вектора b взять вектор g, компоненты g1,…,gn-1 которого уже не обязательно равны 0, но вычисляются по следующей рекуррентной формуле:
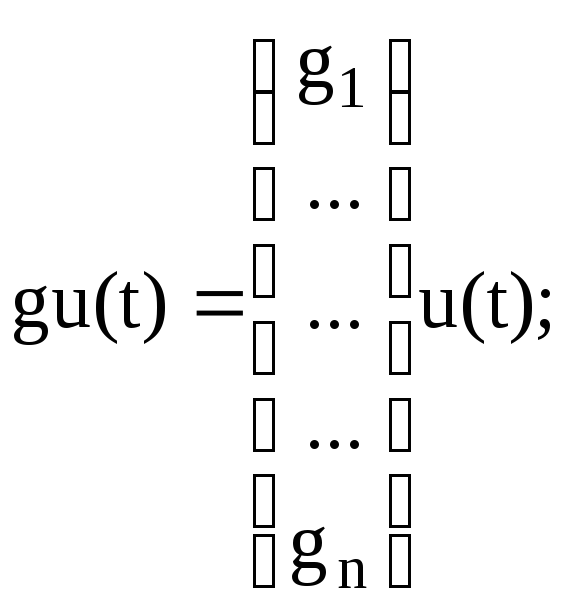
![]()
Это рекуррентная формула в том смысле, что gi вычисляется последовательно, друг за другом. В случае, когда нет производных от входа, автоматически получаем вектор g = (0 0 ….0 b0/a0).
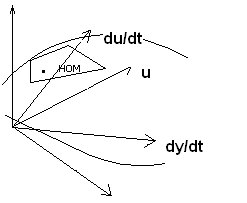
Геометрическая интерпретация и пример линеаризации.
![]()
. Это уравнение (**) можно понимать, как уравнение поверхности в многомерном пространстве с многочисленными координатами, являющимися переменными y, u и их производными всех входящих в (**) порядков.
Номинальная траектория есть просто точка на поверхности, линеаризованное уравнение (2-4) – уравнение касательной плоскости в номинальной точке.
Пример 2. Линеаризация водоема с карасями.
![]()
![]()
; - Полученное ранее в лекции 2 уравнение, описывающее количество рыбы в водоёме.

![]() ,
при с =3/16 получаем
,
при с =3/16 получаем
z1= 0.25; z2 = 0.75.
В окрестности z1 движение неустойчиво (численность нестабильна), а z2 =0.75 подходит для номинального режима. Проведём линеаризацию именно в окрестности z2.
Таким
образом:
![]()
![]()
В нашем случае нелинейность выражена только в виде зависимости от z.
П
![]() ереходя
к исходному уравнению и вводя переменные
в отклонениях:x=z-zном,
u=c-cном,
получаем линейное д.у. в отклонениях
от номинального режима:
ереходя
к исходному уравнению и вводя переменные
в отклонениях:x=z-zном,
u=c-cном,
получаем линейное д.у. в отклонениях
от номинального режима:
Рассмотренные статические характеристики полностью характеризуют поведение элементов автоматики, установившихся режимов, однако в автоматических- системах элементы автоматики работают в неустановившихся, переходных режимах, это связано с тем, что внешние силы, действующие на САУ непрерывно и случайно изменяются, что приводит к непрерывному изменению входной и выходной величины каждого элемента системы.
Переходным процессом системы называется изменение во времени ее состояния параметров с момента появления управляющего или возмущающего воздействия на систему, находившуюся в установившемся (равновесном) состоянии до момента установления в ней вновь установившегося состояния.
Чаще рассмотрение переходных режимов элементов автоматики приводит к дифференциальным уравнениям того или иного вида, в результате физическая задача определения выходной величины элемента системы автоматики при изменяющемся входном сигнале сводится к математической задаче составления дифференциального уравнения и отыскании его решения.
П усть
имеется звено системы автоматического
управления.
усть
имеется звено системы автоматического
управления.
X – входная величина
Y –выходная величина
![]() и
и![]() -
возмущающие воздействия, влияющие на
выходную величину.
-
возмущающие воздействия, влияющие на
выходную величину.
Пусть дифференциальное уравнение, описывающее динамику этого элемента, имеет вид :
F(![]() )=0 (1)
)=0 (1)
Неизвестной
величиной является y,
для решения этого уравнения должны быть
заданы x,
![]() ,
,![]() и начальные условия.
и начальные условия.
y=y0
x=x0
![]() =
=![]() 0
0
![]() =
=![]() 0
0
(1) перепишем в виде:
F(![]() )=0 (2)
)=0 (2)
Уравнение статической характеристики звена в неявном виде.
Решая уравнение (2) относительно y и x получим уравнение в явном виде:
![]()
![]()
Семейство
статических
характеристик
![]()
Все это линейные уравнения.
При исследовании нелинейных элементов САУ описываемых нелинейными уравнениями САУ, такие уравнения пытаются линеаризовать, т.е. заменить нелинейное уравнение линейным, решение которого достаточно близко к решению исходного нелинейного уравнения. Для линеаризации дифференциальных уравнений ТАУ используется метод малых отклонений, суть его в том, что если при изменении входной величины звена, изменение выходной величины является непрерывной функцией времени и отклонение всех изменяющихся величин от их установившихся значений малы, то можно допустить линеаризацию нелинейных зависимостей, при этом за начало отсчета координат берут параметры равновесного состояния систем, а сами уравнения для элементов и систем составляют в отклонениях от состояния равновесия (приращения), таким образом, в уравнение входят не абсолютные значения величин, а их отклонения от заданных равновесных значений.
При отклонении температуры от заданного значения, регулирующий орган воздействует на исполнительный, который регулирует количество газа в печь и устанавливает необходимую температуру. Рабочая характеристика Q=f(S) является нелинейной.
В
равновесном состоянии заданное значение
температуры обеспечивается подачей в
печь газа в количестве Q0
при степени
открытия заслонки S0
. При появлении возмущающих воздействий
заданное значение температуры
восстанавливается путем изменения
подачи газа на
![]() при дополнительном перемещении заслонки
на
при дополнительном перемещении заслонки
на![]() .
.

Вход заслонки – S, регулирующий количество газа.
Q –количество газа.
Учитывая малость отклонений можно в окрестностях точки 01, соответствующую равновесному состоянию, заменить участок кривой Q=f(S) прямой, касательной к этой кривой 0, при этой замене получаем линейную зависимость между входом заслонки и расходом газа около равновесного состояния в виде:
Q=![]() (*)
(*)
Путем
переноса начала координат в точку 01,
получаем уравнение, определяющее
линейную зависимость между дополнительным
входом заслонки
![]() и
дополнительной подачей газа
и
дополнительной подачей газа![]() в отклонениях.
в отклонениях.
![]() (**)
(**)
![]()
![]()
![]() -дифференциальная
чувствительность, постоянен в окрестностях
точки 01,
при удалении от нее погрешность
возрастает, тем быстрее, чем больше
кривизна нелинейной зависимости.
-дифференциальная
чувствительность, постоянен в окрестностях
точки 01,
при удалении от нее погрешность
возрастает, тем быстрее, чем больше
кривизна нелинейной зависимости.
Аналитическая линеаризация выполняется путем разложения функции Q=f(S) в ряд Тейлора для точки равновесного состояния системы.
![]()
И
исключение из ряда членов высших порядков
малости, достаточная точность достигается
при отбрасывании членов разложения со
степенями
![]() больше первой.
больше первой.
f(x)=f(x0)=f’(x0)![]()
![]() -представляет
линеаризованную функцию f(x)
, представленную в отклонениях от
равновесного состояния.
-представляет
линеаризованную функцию f(x)
, представленную в отклонениях от
равновесного состояния.
f’(x0)-производная этой функции в точке равновесного состояния, равная тангенсу наклона линеаризованного участка в окрестностях этой точки.
Вопросы самоконтроля:
Дать определение переходного процесса системы.
Дать определение линеаризации статических характеристик систем управления.
Дать определение статическим и астатическим звеньям систем управления.
Дать определение статическим характеристикам звеньев: линейным и нелинейным.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003