

Учебный материал Понятие решетчатой и модулированной функций. Дискретное преобразование Лапласа
Математическим
аппаратом для исследования импульсных
систем является дискретное преобразование
Лапласа. Непрерывная функциональная
зависимость может быть представлена
решетчатой функцией х[mT],
которая состоит из ординат. Модулированный
сигнал (последовательность
![]() -функций
модулированная ординатами входного
с-функций, модулированная ординатами
входного сигнала в дискретные моменты
времени).
-функций
модулированная ординатами входного
с-функций, модулированная ординатами
входного сигнала в дискретные моменты
времени).
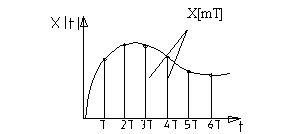

Рис.1 Рис.2
Из
рис.2 в моменты времени, не равные mT,
решетчатая функция =0. В общем случае
одна и таже решетчатая функция может
соответствовать различным непрерывным
и разрывным функциям, если только их
ординаты в дискретные моменты времени
t=mT
равны значениям решетчатой функции.
Т.о. решетчатая функция не может полностью
отразить свойства непрерывной функции,
которую она представляет, поэтому обычно
используют понятие смещенной решетчатой
функции, в которой t=mT0f,
т.е. когда дискретные значения функции
выбираются для смещенных на
![]() относительноmT
моментов времени. Если параметр
относительноmT
моментов времени. Если параметр
![]() непрерывно изменять от 0 до Т, то решетчатая
функция становится тождественной
определенной непрерывной функции.
непрерывно изменять от 0 до Т, то решетчатая
функция становится тождественной
определенной непрерывной функции.


Сигнал x*(t) -реально существующий сигнал;



D-дискретное преобразование Лапласа.
Дифференцирование и интегрирование решетчатых функций
Аналогом первой производной для решетчатой функции является либо первая прямая разность:
f [n] = f [n+1] - f [n],
либо первая обратная разность:
f [n] = f [n] - f [n-1].
Аналогов второй являются вторые разности. Прямая:
2 f [n] =f [n+1] - f [n] = (f [n+2] - f [n+1]) - (f [n+1] - f [n]) = f [n+2] - 2 f [n+1] + f [n],
и обратная:
2 f [n] = f [n] -f [n-1] = f [n] - 2 f [n-1] + f [n-2].
По аналогии могут определяться и высшие разности:
|
k f
[n] = v=0k |
k f
[n] = v=0k |
где: Ckv = k! / (v!(k-v)!).
Очевидно, что если f [n] определена только для положительных n, то для n=0 все обратные разности k f [n] равны нулю, что позволяет ...
Аналогом интеграла является неполная сумма:
[n] = m=0n-1![]() f [m] = м=1n
f [n-v],
f [m] = м=1n
f [n-v],
и полная сумма:
o[n] = [n] + f [n].
Вопросы самоконтроля:
Как используется преобразование по Лапласу для исследования импульсных систем?
Дайте определение решетчатых функций.
Лекция 52
Цель лекции: изучение методов исследования устойчивости импульсных систем.
Задачи лекции:
Аналитическое обоснование получения разностного уравнения импульсной системы.
Критерий устойчивости импульсной системы.
Биполярные преобразования импульсных систем.
Желаемый результат:
Студенты должны знать:
Математический аппарат получения разностного уравнения импульсной системы;
Порядок определения устойчивости импульсной системы;
Порядок проведения биполярных преобразований импульсных систем.
Учебный материал Исследование устойчивости системы по разностному уравнению
Аналогом ДУ для импульсной системы является уравнение в конечных разностях или разностное уравнение (РУ):
b0my[n] + b1m-1y[n] + ... + bm y[n] = f [n],
(оно может быть составлено и в прямых разностях). Если раскрыть разности, то уравнение будет иметь вид:
a0 y[n] + a1 y[n-1] + ... + am y[n-m] = f [n],
|
где: |
am-k
= v=0k |
Cm-vk-v = (m-v)! / [ (k-v)! (m-k)! ] . |
РУ легко машинизируются и для их расчета можно составлять рекуррентный алгоритм.
Учтем запаздывание передаточной функцией звена чистого запаздывания и вынесем теперь уже изображение дискретной последовательности y[n] в уравнении (1) за скобку:
(a0 + a1e-Ts + ... + ame-mTs) Y *[s] = F *[s],
введем обозначение z = eTs и перепишем уравнение:
(a0 + a1 z -1 + ... + am z -m) Y [z] = F [z].
Решая для него ХУ (левая часть приравненная к нулю) можно получить "Общее решение" - т.е. переходную составляющую:
y [n] = С1 z1n + С2 z2n + ... + Сm zmn ,
где: z1, z2, ..., zm - корни ХУ; а Ci - произвольные постоянные.
Вид решения ХУ определяет условие устойчивости для систем, описанных с помощью РУ:
| zi | < 1.