

Статические характеристики звеньев сау
Поведение САУ как в динамике, так и в статике определяется поведением составляющих их звеньев. Звено автоматического устройства – это условно выделенная часть его, функционирующая по определенному алгоритму. Звенья САУ взаимодействуют по средствам связи. Связь – это условно выделенная часть системы, автоматически отражающая направление взаимодействия между звеньями, т.о. любая САУ может быть представлена в виде звеньев и связей между ними, такая схема системы называется структурной схемой.

Точка приложения входной координаты - входом звена, а выходной – выходом.
Функциональная зависимость – установившихся значений входных и выходных координат называется статической характеристикой звена. Y1=f(x1); Y2=f(x2) – статическая характеристика второго звена.
По виду статической характеристики все звенья делятся на статические и астатические, линейные и нелинейные.
Статические звенья – это звенья, у которых функциональная связь между входной и выходной координатами в рабочей области непрерывная и монотонная, т.е. каждому значению x отвечает единственное значение y. Если при этом статическая характеристика линейная или достаточно точно может быть аппроксимирована прямой, то такое статическое звено – линейное.
При криволинейности статической характеристики или наличии в ней кусочно-линейных участков, статическое звено - нелинейное.
Астатические звенья – звенья, у которых при отсутствии функциональной связи между входной и выходной координатами в статическом режиме имеется функциональная связь между входной координатой и изменениями выходной координаты.
![]()
![]() -
примеры
-
примеры


нелинейная
линейная
Порядок производной функциональной зависимости определяет порядок астатизма звена. Выходными координатами звена могут быть разные физические величины, которые влияют на порядок астатизма звена.
Например,
рассмотрим астатическое звено второго
порядка
![]() в виде перемещения. Если выходную
координату примем в виде скорости, то
в виде перемещения. Если выходную
координату примем в виде скорости, то![]() астатизм звена понизится до первой
степени.
астатизм звена понизится до первой
степени.
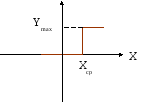
Если выходную координату представить в виде ускорения, то уравнение примет вид a=f(x) и астатическое звено станет статическим. Особое значение имеют звенья, которые имеют вертикальный участок на кривой y=f(x), т.е. тогда при каком-то x, называемом параметром срабатывания, выходная координата изменяется скачком. Подобные звенья называются релейными и относятся к нелинейным, т.к. значению параметры срабатывания отвечает бесконечно большое число y.
Р
Y


Дифференциальная чувствительность звеньев
Производная
выходной координаты по входной,
характеризующая угол наклона касательной
статической характеристики, называется
дифференциальной чувствительностью
звена
![]() - линейная.
- линейная.
При
нелинейности статической характеристики
дифференциальная чувствительность
величина переменная, поэтому пользуются
понятием средней дифференциальной
чувствительностью, равная тангенсу
угла наклона касательной к линеаризованной
статической характеристики
![]() .
.
У
релейного звена на вертикальном участке
дифференциальная чувствительность
равна бесконечности, а на горизонтальном
– нулю, в этом случае используют понятие
коэффициента управления, равного
отношению максимального значения
выходной величины к параметру срабатывания
![]()
Последовательное соединение звеньев – соединение, при котором выходная координата предыдущего звена является входной координатой последующего.

X, Y – вход и выход САУ
Xi, Yi – вход, выход
![]()
![]()
П араллельное
соединение звеньев – это соединение,
при котором входная координата звена
является общей для всех звеньев, а их
выходные координаты алгебраически
складываются.
араллельное
соединение звеньев – это соединение,
при котором входная координата звена
является общей для всех звеньев, а их
выходные координаты алгебраически
складываются.
![]()
![]()
![]()
Встречно-параллельное соединение звеньев (охват звена ОС)

Y1=f(x1)
Y2=f(x2)
Y=Y1=Y2
X1=X![]() Y2
Y2
X1=X![]() f2(x2)=X
f2(x2)=X![]() f2(y)
f2(y)

![]()
![]()
Знак “-” соответствует положительной ОС, чувствительность возрастает.
Знак “+” соответствует отрицательной ОС, чувствительность уменьшается.
Вопросы самоконтроля:
Дать классификация сигналов в САУ.
Дать классификация функциональных элементов.
Дать определение дифференциальной чувствительности систем автоматического управления.
Дать определение дифференциальной чувствительности последовательного соединения звеньев системы.
Дать определение дифференциальной чувствительности параллельного соединения звеньев системы.
Дать определение дифференциальной чувствительности последовательно-параллельного соединения звеньев системы.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003