

Тема 5. Устойчивость систем автоматического управления Лекция 21
Цель лекции: изучить понятие устойчивости САУ.
Задачи лекции:
Устойчивость системы в малом и большом.
Методы определения устойчивости САУ.
Теорема Ляпунова.
Желаемый результат:
Студенты должны знать:
Определение устойчивости САУ в малом;
Определение устойчивости САУ в целом;
Определение устойчивости САУ по Ляпунову.
Учебный материал Устойчивость систем автоматического регулирования
Наиболее важными динамическими свойствами системы являются: устойчивость, время регулирования, время перерегулирования, число колебаний регулируемой величины. Основная характеристика: устойчивость, т.к. три последних требования могут измениться в зависимости от назначения и условий работы установки, а требования устойчивости должно удовлетворять САУ. В зависимости от характера переходного процесса линеаризованной системы различают три основных случая поведения системы после возмущающего воздействия: 1) система не может восстановить равновесное состояние, значения управляемой переменной (выходной величины) все больше откланяется от заданного, такой процесс называется расходящимся, а система неустойчивой; 2) Система возвращается в равновесное состояние значение управляемой переменной отличается от заданного на величину статической ошибки, такой процесс называется сходящимся, а система устойчивой; 3) Система характеризуется установившимся периодическим движением, такой процесс называется колебательным, а система будет находиться на границе асимптотической устойчивости.
Методы определения устойчивости
Устойчивость
линейных систем не зависит от величины
возмущения. Система устойчивая при
малых возмущениях, будет устойчивой и
при больших возмущениях, поэтому
достаточно исследовать и определить
устойчивость в малом, т.е. найти
устойчивость уравнением в форме
приращений. Допустим, что в установившемся
состоянии регулируемая величина имеет
некоторое значение x0.
Выведем систему из этого состояния при
помощи какого-либо воздействия, так
чтобы x0
изменилась на
![]() .
И после этого устраним причину, вызвавшую
это изменение, тогда система будет
устойчивой, если будет выполняться
условие:
.
И после этого устраним причину, вызвавшую
это изменение, тогда система будет
устойчивой, если будет выполняться
условие:
![]() (1)
(1)
В
случае невыполнения этого условия,
система будет неустойчивой. Допустим,
что изменение регулируемой величины в
процессе регулирования. Описывается
линейным уравнением n-го
порядка с постоянными коэффициентами,
тогда отклонение
![]() также будет описываться диф.ур. этого
порядка. Интегрируя полученное уравнение
находим закон изменения интересующей
нас переменной по времени, согласно
которому можно сделать заключение о
характере переходного процесса
(устойчивый, неустойчивый). Устойчивость
системы определяют характером свободного
движения системы, т.к. свободное движение
системы описывается однородным диф.ур.
(без правой части), то для нахождения
условий устойчивости достаточно
исследовать св-ва решения однородного
диф.ур. В общем случае для системыn-го
порядка имеем диф.ур., которое описывает
поведение отклонения
также будет описываться диф.ур. этого
порядка. Интегрируя полученное уравнение
находим закон изменения интересующей
нас переменной по времени, согласно
которому можно сделать заключение о
характере переходного процесса
(устойчивый, неустойчивый). Устойчивость
системы определяют характером свободного
движения системы, т.к. свободное движение
системы описывается однородным диф.ур.
(без правой части), то для нахождения
условий устойчивости достаточно
исследовать св-ва решения однородного
диф.ур. В общем случае для системыn-го
порядка имеем диф.ур., которое описывает
поведение отклонения
![]() регулируемой величины:
регулируемой величины:
![]()
а0, а1, аn- постоянные коэффициенты, величина которых зависит от параметров САУ.
Решение (2) может быть представлено в виде:
![]() =
=![]() (3)
(3)
Ai- постоянная интегрирования, определяется из начальных условий.
![]() -
корни, характеризующие свободное
движение и определяемые из характеристического
уравнения.
-
корни, характеризующие свободное
движение и определяемые из характеристического
уравнения.
![]()
Исследуем
(3) с точки зрения устойчивости системы,
согласно определению для устойчивости
системы необходимо, чтобы отклонение
![]() приt
приt![]() ,
а это возможно только тогда, когда все
составляющие уравнения (3) с течением
времени стремятся к 0. Поскольку всеAi=const,
то следовательно характер поведения
каждой составляющей
,
а это возможно только тогда, когда все
составляющие уравнения (3) с течением
времени стремятся к 0. Поскольку всеAi=const,
то следовательно характер поведения
каждой составляющей
![]() зависит
от
зависит
от![]() .
Если
.
Если![]() - положительное, вещественное число, то
составляющая
- положительное, вещественное число, то
составляющая![]() будет увеличиваться до бесконечности.
будет увеличиваться до бесконечности.
П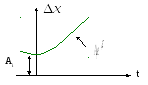
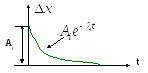 ри
отрицательных вещественных корнях
составляющая свободного движения приt
ри
отрицательных вещественных корнях
составляющая свободного движения приt![]() монотонно убывает до 0.
монотонно убывает до 0.
![]() -
комплексное число, тогда выражение
-
комплексное число, тогда выражение
![]() запишется
запишется![]()
![]() (5)
– это колебательный процесс, амплитуда
А которого возрастает или убывает в
зависимости от знака вещественной части
(5)
– это колебательный процесс, амплитуда
А которого возрастает или убывает в
зависимости от знака вещественной части
![]() комплексного корня. Если
комплексного корня. Если![]() >0,
то получим колебательный процесс с
нарастающей амплитудой. Если
>0,
то получим колебательный процесс с
нарастающей амплитудой. Если![]() <0,
то приt
<0,
то приt![]() ,
А
,
А![]() .
.
Т.о. аналитические выражения составляющих свободного движения имеют вид:
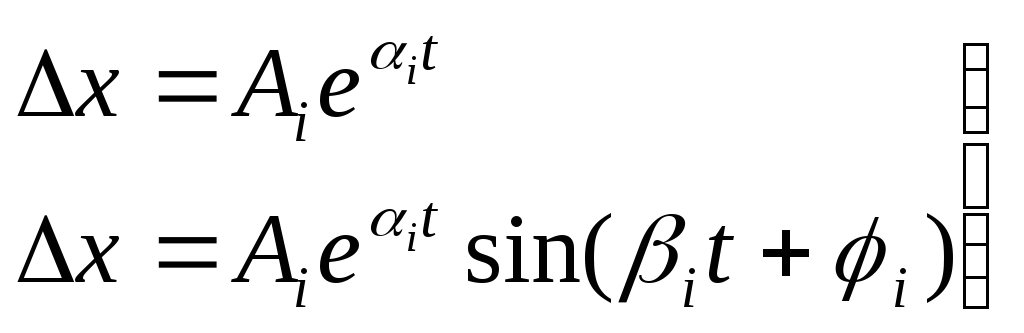 (6)
(6)
Ai-постоянная интегрирования, определяется из начальных условий.
![]() -
вещественная часть корня, характеризующая
интенсивность затухания колебаний.
-
вещественная часть корня, характеризующая
интенсивность затухания колебаний.
![]() -
мнимая часть корня, хар-ся частоту
свободных колебаний.
-
мнимая часть корня, хар-ся частоту
свободных колебаний.
![]() -
начальная фаза.
-
начальная фаза.