

Лекция 11.
Цель лекции: изучение типовых воздействий в автоматике; правила определения передаточной функции звена при подаче разных видов входных сигналов.
Задачи лекции:
Типовые воздействия в автоматике:
скачок входного сигнала или единичное ступенчатое воздействие 1(t);
скачок скорости входного сигнала
 (импульсная);
(импульсная);гармоническое входное воздействие (синусоидальный входной сигнал).
Переходные функции типовых звеньев.
Желаемый результат:
Студенты должны знать:
Типовые воздействия в САУ;
Порядок построения переходных функций типовых звеньев САУ.
Учебный материал Типовые воздействия в автоматике
Характер переходных процессов зависит от состава системы и от формы входного сигнала. Входные сигналы могут иметь различную форму. В автоматике при исследовании новых автоматических устройств и систем применяются сигналы определенной формы, называются типовыми воздействия.
1. скачок входного сигнала или единичное ступенчатое воздействие 1(t).
2.
скачок скорости входного сигнала
![]() (импульсная)
(импульсная)
3. гармоническое входное воздействие (синусоидальный входной сигнал)
1.
Пусть на
вход звена подается ступенчатое
воздействие, тогда выходная величина
![]() определяется
при этом видом его диф.ур. Отношение
выходной величины звена при входном
воздействии в виде ступенчатой функции
к ординате этой функции при нулевых
начальных условиях и отсутствии
возмущающих воздействий называется
переходной характеристикой звена.
определяется
при этом видом его диф.ур. Отношение
выходной величины звена при входном
воздействии в виде ступенчатой функции
к ординате этой функции при нулевых
начальных условиях и отсутствии
возмущающих воздействий называется
переходной характеристикой звена.


h(t)=y(t)/B
x(t)=B1(t)
x(t)=0 при t<0
x(t)=1(t)
при t![]()
Обычно в качестве переходной функции рассматривают не отношение выходной величины y(t) к ординате В, а непосредственно выходную величину y(t) при условии, что входное ступенчатое воздействие является единичным, т.е. В=1 (h(t)=y(t))-вид кривой определяется корнями диф.ур. Зная переходную функцию звена всегда можно определить ее передаточную функцию. Установим связь между переходной и передаточной функциями.
h(t)-выходная
1(t)-
входная![]() h(t)=W(t)1(t)
h(t)=W(t)1(t)![]()
![]() *
связь между
переходной и передаточной функциями
*
связь между
переходной и передаточной функциями
Передаточная функция равна произведению аргумента преобразования Лапласа Р на изображение переходной функции по Лапласу h(p).
Правила определения передаточной функции
1. Подаем на вход единичную функцию.
2. Определяем переходную функцию вида h(t).
3. Определяем по таблице изображение h(p).
4. По функциям * определим передаточную функцию звена.
2.
Импульсное воздействие. Пусть на вход
звена подается импульсное воздействие
![]() ,
где
,
где![]() -импульсная
функция удовлетворяет условиям приt
неравное 0,
-импульсная
функция удовлетворяет условиям приt
неравное 0, ![]() =0,
апри t=0
=0,
апри t=0
![]() =
=![]() .При
этом на выходе будет сигнал
.При
этом на выходе будет сигнал![]() ,
представляющий отношение выходной
величины звена при входном воздействии
в виде
,
представляющий отношение выходной
величины звена при входном воздействии
в виде![]() к площади этого
импульса при нулевых начальных условиях
и отсутствии возмущающих воздействий,
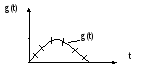
такой сигнал g(t)
называется функцией веса. Обычно в
качестве функции веса рассматривается
непосредственно выходная величина при
условии, что входная импульсная функция
является единичной, т.е. С=1
к площади этого
импульса при нулевых начальных условиях
и отсутствии возмущающих воздействий,
такой сигнал g(t)
называется функцией веса. Обычно в
качестве функции веса рассматривается
непосредственно выходная величина при
условии, что входная импульсная функция
является единичной, т.е. С=1
![]() L[g(t)]=W(p)L[
L[g(t)]=W(p)L[![]() ]
]
![]() - связь
функции веса с передаточной функцией
- связь
функции веса с передаточной функцией
Правила определения передаточной функции
1. Подать на вход ударное воздействие.
2. Определить реакцию звена на ударную функцию g(t)-функция веса.
3. Определить по таблице преобразование Лапласа функции веса, она и будет передаточной функцией звена.
Функция веса звена может быть найдена по переходной функции
W(p)=h(p)p,
а W(p)=g(p)![]() h(p)p=g(p)
h(p)p=g(p)
L-1(h(t))=h(t ) L-1(g(p))=g(t), т.к. p=d/dt, то g(t)=dh(t)/dt
Ф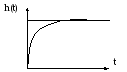 ункция
веса определяется скоростью изменения
переходной функции.
ункция
веса определяется скоростью изменения
переходной функции.
Переходные функции типовых звеньев
1. Безинерционное звено.
y=kx при подаче на его вход скачкообразно поступающей входной величины x0 получаем на выходе мгновенное изменение выходного сигнала без динамических переходных процессов и искажений.


2. Интегрирующее звено.

Определим характер изменения выходной величины звена подаче на его вход постоянной входной величины X0.
Определим выходное воздействие, взяв его оригинал.
![]()
3. Инерционное звено первого порядка.
Определим характер изменения выходной величины при подаче на его вход скачка выходной величины X0. найдем изображение по Лапласу входной величины.
X(p)=L[X0]=X0/p
И входной величины
Y(p)=W(p)X(p)=kX0/p(Tp+1)
Выразим оригинал функции Y через ее изображение, вынося постоянную величину за знак преобразования Лапласа.
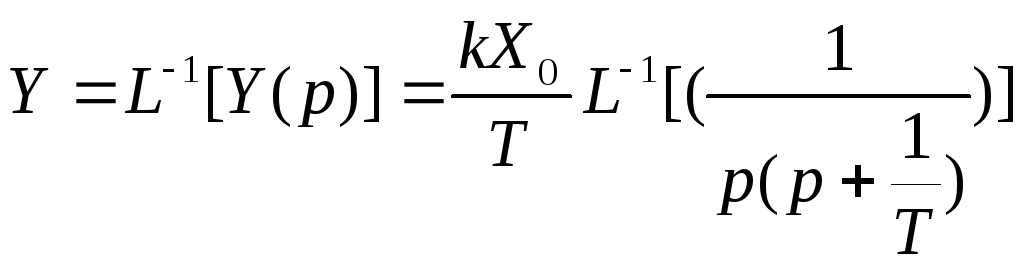
Положим
1/T=![]()
![]() ,
т.е. кривая переходного процесса имеет
вид экспоненты. Постоянная времени t
определяет динамические свойства звена,
чем больше t,
тем медленнее протекает переходный
процесс.
,
т.е. кривая переходного процесса имеет
вид экспоненты. Постоянная времени t
определяет динамические свойства звена,
чем больше t,
тем медленнее протекает переходный
процесс.
Примечание. Время регулирования, т.е. время, в течение которого выходная величина практически будет равна новому установившемуся значению y=0,95kx0 равно примерно трем постоянным времени. По степени этого времени динамическая ошибка регулирования составляет всего 5% нового установившегося значения выходной величины.
П остоянная
времени звена Т определяется как проекция
на ось времени отрезка касательной к
экспоненте, заключенного между точкой
касания и точкой пересечения касательной
с линией установившегося значения
выходной величины.
остоянная
времени звена Т определяется как проекция
на ось времени отрезка касательной к
экспоненте, заключенного между точкой
касания и точкой пересечения касательной
с линией установившегося значения
выходной величины.
4. Дифференцирующее звено.
![]() W(p)=kp
W(p)=kp
Подача x0 должна вызвать мгновенное изменение выходной величины y от 0 до бесконечности и немедленный спад ее до 0, что практически невозможно. Поэтому рассмотрим реальное дифференцирующее звено с переходной функцией.
![]()
И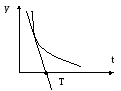 зображение
выходной величины при скачкообразном
изменении входной величины от 0 доx0
будет
зображение
выходной величины при скачкообразном
изменении входной величины от 0 доx0
будет
![]()
5. Инерционное звено второго порядка.
![]() (1)
(1)
![]()
Переходный процесс инерционного звена исследуем путем аналитического решения диф. ур. (1) следующим методом:
Для получения общего решения неоднородного уравнения:
![]() (2)
(2)
достаточно какому-либо его частному решению + общего вида решение однородного с ним уравнения, т.е. уравнение (2) с нулевой правой частью.
Одно из частных решений неоднородного уравнения (2) при скачкообразном изменении x=x0, будет новое значение x0, установившееся после окончания переходного процесса, будет: a0y=F(x)
![]() (3)
(3)
Однородное диф. ур. Получим из уравнения (2) при F(x)=0. Запишем сразу его характеристическое уравнение: аnpn+an-1pn-1+…+a1p+a0=0 (4)
Определим корни характеристического уравнения и тогда общее решение однородного диф.ур. найдем:
y(t)=C1![]() (5)
(5)
Характеристическое уравнение (5) в общем случае может иметь i одинаковых корней и n-i неодинаковых. С и А постоянные интегрирования, которые находятся из начальных условий. Описанный метод решения диф.ур. может использоваться для исследования переходных процессов всех ранее рассмотренных звеньев.
Характеристическое уравнение уравнения (1):
![]() (6)
(6)
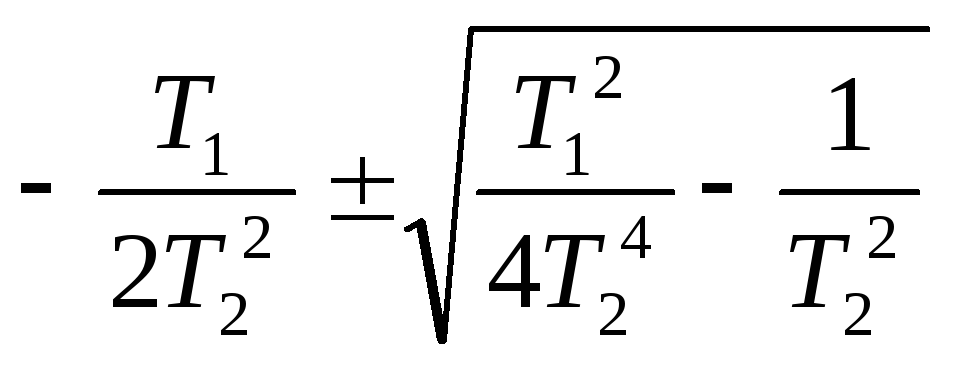 (7)
(7)
частное решение диф.ур. (1) будет иметь вид: y0=kx0 (8)
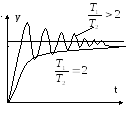
Характер переходного процесса инерционного звена второго порядка зависит от знака подкоренного выражения (7). Здесь возможны три случая:
1. Т1/Т2>2 оба корня характеристического уравнения вещественные, отрицательные
![]()
Согласно ур. (5) общее решение однородного уравнения имеет вид:
![]()
Прибавив к нему частное решение (8) получим общее решение диф.ур. (1)
y=kx0+y(t) (9) при Т1/Т2>2
Т.к. по подачи входной величины система находилась в равновесии, то при t=0 имеем: y=0, dy/dt=0, следовательно для начальных условий находим:
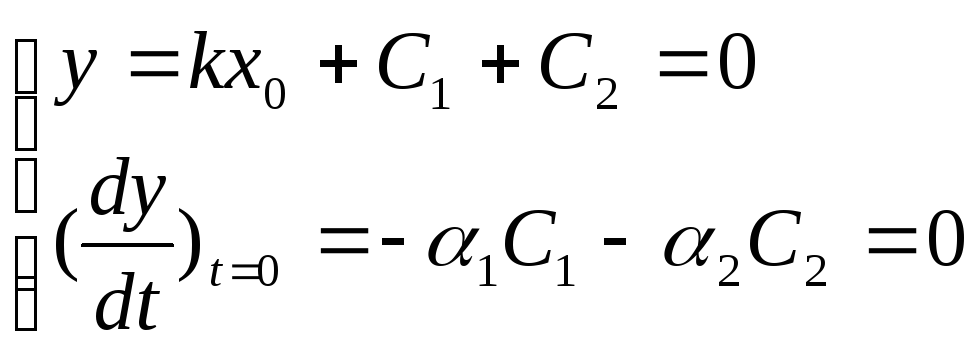
Решив это уравнение, получим:
Переходный процесс при Т1/T2>2
![]()

 (10)
(10)
2. Т1/Т2=2 Характеристическое уравнение имеет два равных вещественных, отрицательных корня.
![]()
Переходный процесс определяется выражением:
 (11)
(11)
3.
Т1/Т2<2
Характеристическое уравнение имеет
два сопряженных комплексных корня.
![]()
Переходный процесс определяется выражением:
![]() (12)
(12)
Это
выражение определяет собой затухающую
синусоиду с убыванием амплитуды по
экспоненте, определяемой величиной
![]() .
В связи с этим инерционное звено второго
порядка, характеристическое уравнение
которого имеет комплексные сопряженные
корни называется колебательным звеном.
Если корни вещественные, отрицательные,
то звено называется апериодическое
второго порядка.
.
В связи с этим инерционное звено второго
порядка, характеристическое уравнение
которого имеет комплексные сопряженные
корни называется колебательным звеном.
Если корни вещественные, отрицательные,
то звено называется апериодическое
второго порядка.
Вопросы самоконтроля:
Дать определение ступенчатого воздействия на звено системы автоматики.
Дать определение импульсного воздействия на звено системы автоматики.
Дать определение гармонического воздействия на звено системы автоматики.
Дать порядок расчета передаточной функции звена при ступенчатом воздействии на звено.
Дать порядок расчета передаточной функции при импульсном воздействии на звено.
Дать порядок расчета передаточной функции при гармоническом воздействии на звено.
Порядок построения переходного процесса для различных видов звеньев.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003