

Лекция 8.
Цель лекции: рассмотреть типовые динамические звенья автоматики; получить их передаточные функции.
Задачи лекции:
Изучить характеристики типовых звеньев автоматики:
Безинерционное звено;
Инерционное звено;
Дифференцирующее звено;
Интегрирующее звено;
Колебательное звено;
Форсирующее звено.
Желаемый результат:
Студенты должны знать:
Характеристики безинерционного звена САУ;
Характеристики инерционных звеньев 1 и 2-го порядков САУ;
Характеристики дифференцирующих звеньев САУ;
Характеристики интегрирующих звеньев САУ;
Характеристики колебательного звена САУ;
Характеристики форсирующего звена САУ.
Учебный материал Типовые динамические звенья автоматики
Практически для всех устройств, дифференциальные уравнения которых имеют порядок не выше второго, можно записать:
![]() (1)
(1)
В этом уравнении есть производные в правой части, которые характеризуют те обстоятельства, что звено может реагировать на только на входное воздействие, но и на скорость его изменения и ускорения. Устройство любой физической природы, принципа действия и любой конструкции, описываемые дифференциальным уравнением определенного вида, получаемого на основе уравнения (1) называется динамическим звеном.
Ограничиваясь вторым порядком дифференциальных уравнений, получаем небольшое число возможных типов динамических звеньев:
1.
Безъинерционное (усилительное звено),
в этом звене выходная величина в каждый
момент времени пропорциональна входной
величине и выражается
![]() .
.
Если взять изображение по Лапласу Ф(р)=кМ(р)
W(p)=k- передаточная функция
2. Инерционное звено, у этого звена при приложении какого-либо воздействия реакция не сразу достигает конечного значения, а возрастает постепенно, в большенстве случаев по экспоненте
а)
![]() -
апериодическое звено первого порядка
-
апериодическое звено первого порядка
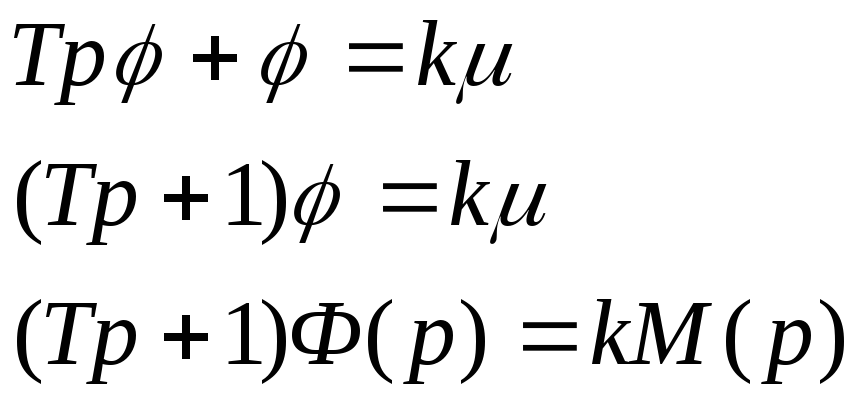
![]() -
передаточная функция
-
передаточная функция
Т- постоянная времени
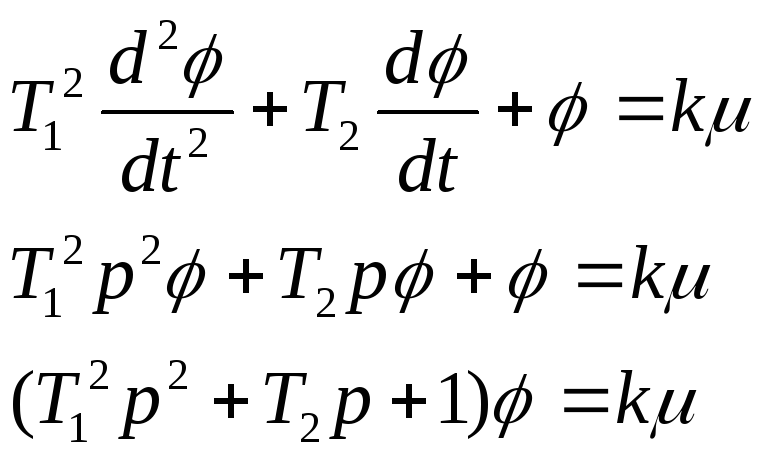
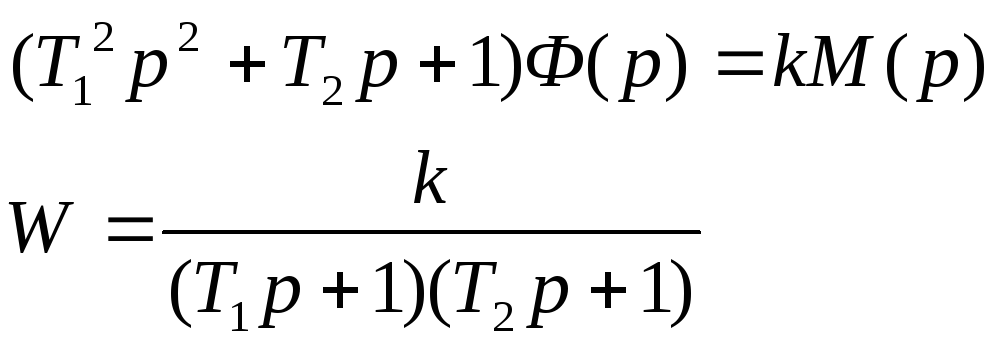
б) Инерционное звено второго порядка
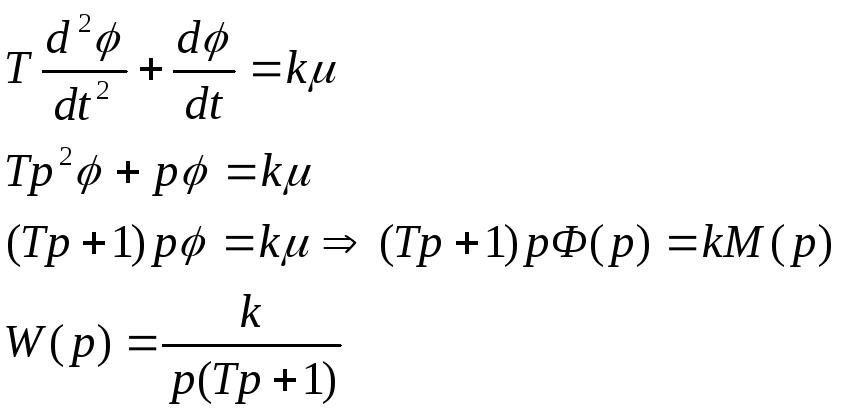
3. Интегрирующее звено, в нем в установившемся режиме линейная зависимость связывает входную величину и производную выходной величины, т.е. выходная величина пропорциональна по времени интегралу входной величины.

![]()
![]() -
передаточнаяфункция
идеального
интегрирующего звена
-
передаточнаяфункция
идеального
интегрирующего звена
Реальное интегрирующее звено
4. Дифференцирующее звено
К дифференциальным звеньям относятся звенья, в которых в установившемся режиме выходная величина пропорциональна производной по времени входной величины, т.е. чем больше скорость изменения входного сигнала, тем больше величина выходного.
а) Идеальное дифференцирующее звено

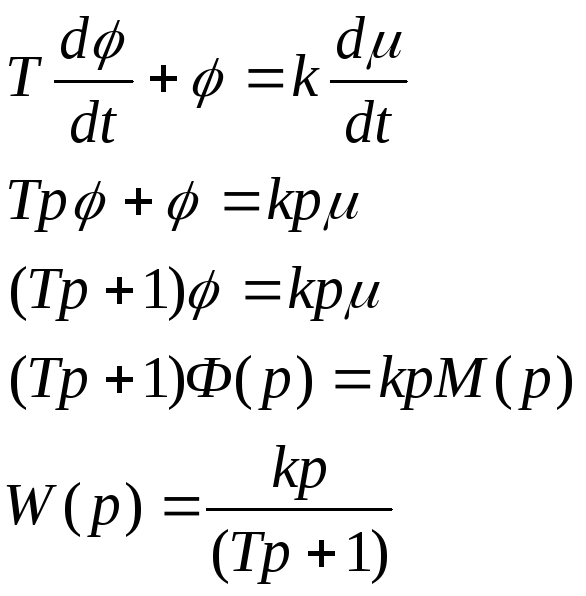
б) Реальное дифференцирующее звено
5. Форсирующее звено, у которого выходной сигнал определяется двумя слагаемыми, одно из них является входным сигналом, а другое пропорционально производной этого сигнала.
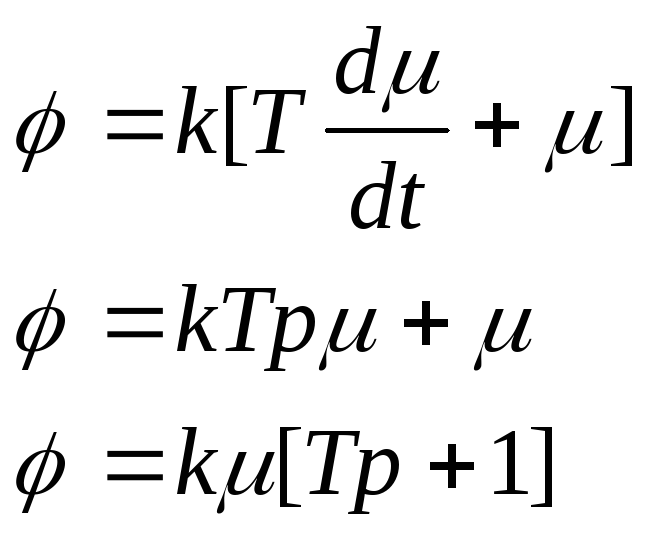
Ф(p)=M(p)k(Tp+1)
W(p)=k(Tp+1)
Получить форсирующее звено в идеальном виде невозможно практически.
Примечание. Передаточная функция форсирующего звена обратная передаточной функции инерционного звена, поэтому если форсирующее звено применить совместно с инерционным, то при равенства их постоянных времени влияние инерционного звена устраняется и система становится безинерционной, это используется для улучшения работы систем регулирования.
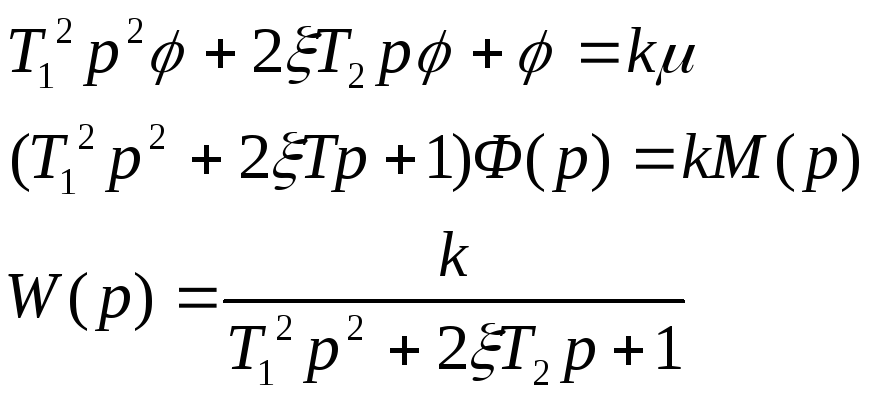
6. Колебательное звено.
Описывается уравнением
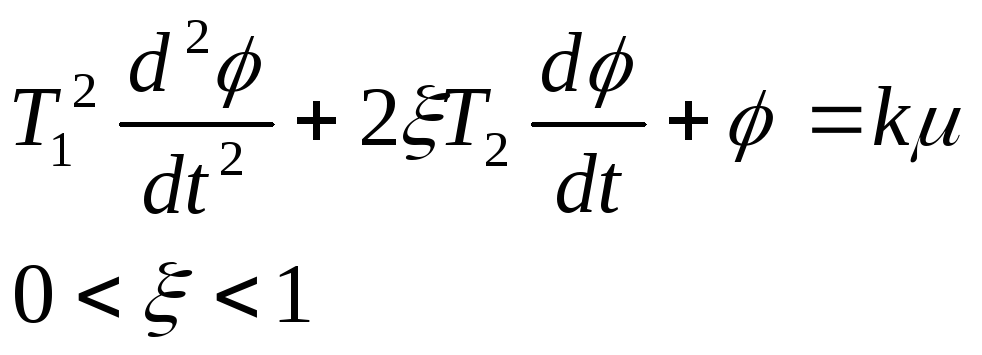
![]() -степень
затухания колебаний
-степень
затухания колебаний
Правила
1. Если в передаточной функции в числителе стоит к, то звено усилительное.
2. Если в знаменателе передаточной функции стоит Тр+1, то звено также инерционное с постоянной времени Т.
3. Если в знаменателе передаточной функции в качестве множителя есть оператор р, то звено интегрирующее.
4. Если в числителе передаточной функции имеется в качестве множителя оператор р, то звено дифференцирующее.
Вопросы самоконтроля:
Дать определение безъинерционного звена автоматики, записать его передаточную функцию.
Дать определение инерционного звена 1-го порядка, записать его передаточную функцию.
Дать определение инерционного звена 2-го порядка, записать его передаточную функцию.
Дать определение интегрирующего звена, записать его передаточную функцию.
Дать определение дифференцирующего звена, записать его передаточную функцию.
Дать определение форсирующего звена, записать его передаточную функцию.
Дать определение колебательного звена, записать его передаточную функцию.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003