

Лекция №1. Введение
Курс «Основы теории управления» введен в учебный план специальности ЭВМ по двум причинам:
1. Современные ЭВМ представляют собой довольно сложную совокупность технических средств, которая нуждается в проведении мероприятий, позволяющих осуществить автоматическое управление всем вычислительным процессом, а также автоматическое регулирование отдельных параметров, обеспечивающих нормальный режим функционирования вычислительного комплекса, например, таких как температурный режим. 2. В современных условиях развития технического прогресса управления различного ряда технологическими и техническими процессами осуществляется, как правило, с использованием ЭВМ, получивших название управляющих вычислительных машин. Проектирование систем управления, имеющих в своем контуре ЭВМ, носит специфический характер и не возможна без знания принципов и методов теории управления.
Понятие об управлении: основные принципы управления
Управление - это такая организация того или иного процесса, которая обеспечивает достижение определенных целей.
Чтобы понять основные принципы управления, рассмотрим в качестве примера процесс управления автомобилем. Следя за рулем, водитель видит перед собой дорогу, наблюдает куда идет машина, и на основании этого принимает решения по изменению направления ее движения. Анализируя этот процесс, можно выделить в нем следующие основные элементы:
1. Получение информации о направлении, в котором должна двигаться машина, т.е. информации о задачах управления. Эту информацию водитель получает при помощи зрения. 2. Получение информации о результатах управления, т.е. куда движется машина. Эту информацию он также получает при помощи зрения.
3. Анализ полученной информации и принятие на основе этого решения о необходимых управляющих действиях. 4. Исполнения принятого решения.
Эти четыре элемента составляют основу всякого управления. Если исключить хотя бы один из них, то управление автомобилем станет невозможным, например, завязать глаза водителю глаза или вывести из строя руки.
Таким образом, в самом общем процесс управления состоит из следующих четырех элементов:
1. Получение информации о задачах управления 2. Получение информации о результатах управления, т.е. о поведении объекта управления 3. Анализ полученной информации и выработка решения 4. Исполнение решения, т. е. осуществление управляющих действий
В соответствии с этим для организации процесса управления необходимо иметь источники информации о задачах управления и результатах управления, устройстве для анализа полученной информации и выработки решения и исполнительном устройстве, осуществляющие управление объектом.
Из приведенного анализа процесса управления следует, что в его организации решающую роль играет получение информации о результатах управления. И как видно управляющее воздействие зависит от того какой результат оно вызывает. Такая связь причины и следствия называется обратной связью.
Принцип управления с использованием информации о результатах управления называется принципом обратной связи.
Однако в некоторых случаях принцип обратной связи использовать не удается из-за практической невозможности получить информацию о результатах управления (Например, для случая с автомобилем это очень сложно ).
В тоже время в ряде случаев закон изменения состояния объекта управления заранее известен и практически не зависит от результатов управления, а зависит только от управляющих воздействий. В этом случае можно определить закон изменения управляющего воздействия по этому закону.
Управление, обеспечивающее заданный закон изменения состояния объекта управления во времени, независимо от результатов управления, называется программным управлением или управлением по разомкнутому циклу.
В отличии от управления по разомкнутому циклу, управление с использованием принципа обратной связи называется управлением по замкнутому циклу.
Совокупность всех устройств, обеспечивающих управление каким-либо объектом, называется системой управления.
Если функции всех элементов системы управления выполняются различными устройствами без непосредственного участия человека, то система управления называется автоматической. Примеры таких систем автопилот, устройство управления процессом вычислений в ЭВМ.
Система управления, в которой решения об управляющих воздействиях принимаются людьми, а автоматическое устройство используется только для сбора, обработки и представления информации о задачах и результатах управления и для сравнительного анализа возможных вариантов решения, называется автоматизированной. Например, система управления некоторым сложным производством или даже отраслью.
В некоторых случаях задачей управления является обеспечение постоянной некоторой физической величины. Такой частный вид управления называется регулированием.
Устройство, обеспечивающее автоматическое регулирование значения какой-либо физической величины называют регулятором.
Совокупность регулируемого объекта и регулятора называется системой автоматического регулирования.
Структура автоматической системы и ее основные элементы
На основании изложенного структурную схему автоматической системы можно представить в следующем виде:
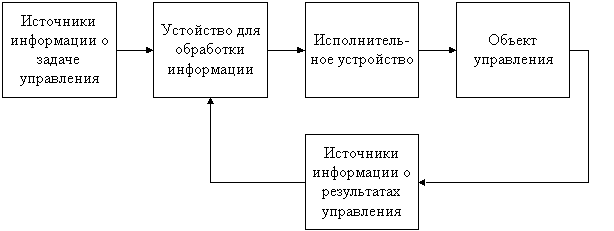
Основными элементами автоматической системы управления являются:
1. измерители различных физических величин, называемые датчиками, вводящие в систему управления информацию о задачах управления и результатах управления 2. функциональные или вычислительные устройства, осуществляющие анализ информации и вырабатывающие ? системы управления 3. исполнительные устройства, осуществляющие управление
Объект управления, цель и задача управления
Как известно, под объектом управления понимают совокупность технических средств, которая нуждается в оказании специально организованного воздействия извне для достижения поставленной цели управления.
На практике большинство объектов управления являются многомерными. Структурно такой объект можно изобразить схемой, представленной на рис. 1. Состояние объекта управления характеризуется некоторым вектором фазовых координат
![]()
составляющие которого
![]() могут
иметь самую различную физическую
природу. К объекту управления приложены
внешние воздействия, определяемые
вектором:
могут
иметь самую различную физическую
природу. К объекту управления приложены
внешние воздействия, определяемые
вектором:
![]() ,
,
называемым вектором управления и возмущающие воздействия, характеризуемые вектором:
![]()
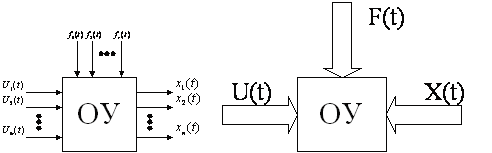
рис.1
Векторы
![]() связаны
некоторой закономерностью. В дальнейшем
будут рассматриваться такие объекты,
в которых связь между составляющими
векторов
связаны
некоторой закономерностью. В дальнейшем
будут рассматриваться такие объекты,
в которых связь между составляющими
векторов
![]() может
быть записана в виде системы обыкновенных
дифференциальных уравнений:
может
быть записана в виде системы обыкновенных
дифференциальных уравнений:
![]()
или в виде разностных уравнений:
![]()
где
![]() -
значения составляющих векторов в
дискретные моменты времени
-
значения составляющих векторов в
дискретные моменты времени
![]() .
.
Примеры объектов:
· самолет (управляемая величины: высота, скорость полета, управляющие воздействия: тяга, положения рулей высоты и курса)
· химический реактор
При этом полагаем, что функции
![]() непрерывны
и непрерывно дифференцируемы по своим
аргументам.
непрерывны
и непрерывно дифференцируемы по своим
аргументам.
Векторы
![]() в
зависимости от природы объекта связаны
различными систематическими зависимостями.
в
зависимости от природы объекта связаны
различными систематическими зависимостями.
В общем случае
![]() ,
где
,
где
A- оператор, определяющий вид зависимости.
В простейшем случае, когда это обычная функциональная зависимость
![]() ,
*
,
*
объект называют статическим или без ?, а зависимость или ее графическое изображение - статической характеристикой объекта.
Если объект обладает инерцией, то изменение координат под воздействием возмущений F или управлений U происходит не мгновенно и в этом случае объект называют динамическим.
Величины X, U, F в динамических объектах связаны дифференциальными, интегральными или разностными уравнениями.
Управления
![]() могут
быть непрерывными функциями времени
или иметь разрывы первого рода. В связи
с указанным функции координат управления
могут
быть непрерывными функциями времени
или иметь разрывы первого рода. В связи
с указанным функции координат управления
![]() делят
на кусочно-непрерывные (линия 1), имеющие
разрывы первого рода; на кусочно-гладкие,
имеющие разрывы первого рода для
производной
делят
на кусочно-непрерывные (линия 1), имеющие
разрывы первого рода; на кусочно-гладкие,
имеющие разрывы первого рода для
производной
![]() (линия
2); на гладкие (линия 3), имеющие непрерывные
производные
(линия
2); на гладкие (линия 3), имеющие непрерывные
производные
![]() .
.
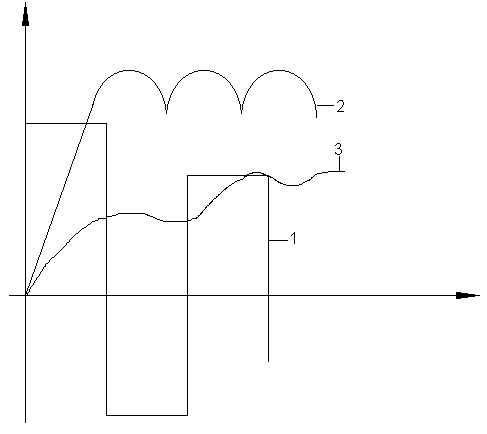
Рис. 2.
В отличии от координат управления
координаты состояния
![]() могут
изменяться только с ограниченной
скоростью, так как они представляют
собой выходные величины некоторых
динамических элементов. Это означает,
что функции
могут
изменяться только с ограниченной
скоростью, так как они представляют
собой выходные величины некоторых
динамических элементов. Это означает,
что функции
![]() могут
быть гладкими и кусочно-гладкими.
могут
быть гладкими и кусочно-гладкими.
Рассмотрим далее понятия цели и задачи управления.
Для этого введем в рассмотрение некоторую
n- мерную систему координат, по осям
которой будем откладывать величины
![]() (Рис.
3). Графически подобную систему можно
отобразить лишь при n=1,2,3. В остальных
случаях она не поддается геометрической
интерпретации и вводится как удобный
для последующего изложения прием.
Пространство, характеризуемое этой
системой, принято называть пространством
состояний или фазовым пространством.
По фазовым пространством иногда понимают
тот частный случай пространства
состояний, когда величины
(Рис.
3). Графически подобную систему можно
отобразить лишь при n=1,2,3. В остальных
случаях она не поддается геометрической
интерпретации и вводится как удобный
для последующего изложения прием.
Пространство, характеризуемое этой
системой, принято называть пространством
состояний или фазовым пространством.
По фазовым пространством иногда понимают
тот частный случай пространства
состояний, когда величины
![]() имеют
смысл соответственно выходного процесса
объекта, скорости изменения выходного
процесса, ускорения и т. д. (применительно
к одномерному случаю).
имеют
смысл соответственно выходного процесса
объекта, скорости изменения выходного
процесса, ускорения и т. д. (применительно
к одномерному случаю).
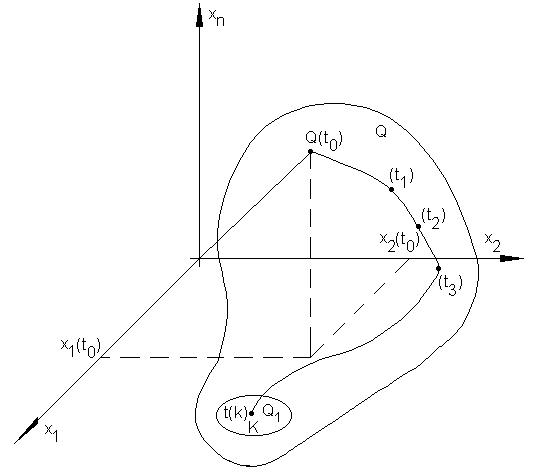
Рис. 3.
Пусть в некоторый момент времени
![]() (
обычно
(
обычно
![]() =0
), используемый как начало отсчета
времени, переменные состояния
=0
), используемый как начало отсчета
времени, переменные состояния
![]() имеют
значения
имеют
значения
![]() или
иными словами вектор состояния равен
или
иными словами вектор состояния равен
![]() .
Начало этого вектора находится в точке
0 пространства состояния, а конец - в
точке K, которую принято называть
изображающей точкой. Пусть далее объект
управления описывается в пространстве
состояний уравнением вида:
.
Начало этого вектора находится в точке
0 пространства состояния, а конец - в
точке K, которую принято называть
изображающей точкой. Пусть далее объект
управления описывается в пространстве
состояний уравнением вида:
![]() ,
,
Пусть теперь к объекту приложены
конкретные воздействия U(t) и F(t). Подставим
их в уравнение (1.1). Если это уравнение
решить при начальных условиях
![]() ,
то получим решение
,
то получим решение
![]() ,
зависящее от всех воздействий и начальных
условий. Этому решению при каждом t в
пространстве состояний будет
соответствовать определенная точка.
Если все эти точки соединить кривой
(рис. 2), получим траекторию, называемую
траекторией движения объекта. Условно
можно принять, что изображающая точка
во времени движется в пространстве
состояний, а оставляемый ею в результате
след и представляет собой траекторию
движения объекта.
,
зависящее от всех воздействий и начальных
условий. Этому решению при каждом t в
пространстве состояний будет
соответствовать определенная точка.
Если все эти точки соединить кривой
(рис. 2), получим траекторию, называемую
траекторией движения объекта. Условно
можно принять, что изображающая точка
во времени движется в пространстве
состояний, а оставляемый ею в результате
след и представляет собой траекторию
движения объекта.
Предположим, что момент
![]() соответствует
началу управления объектом, т.е. начиная
с этого момента на объект подается
управление U(t). Из-за конструктивных,
прочностных, энергетических и других
особенностей объекта на его вход не
могут подаваться произвольные управления.
Реальные управления должны быть подчинены
некоторым ограничениям, совокупность
которых формирует некоторую область
возможных значений. Обозначим эту
область
соответствует
началу управления объектом, т.е. начиная
с этого момента на объект подается
управление U(t). Из-за конструктивных,
прочностных, энергетических и других
особенностей объекта на его вход не
могут подаваться произвольные управления.
Реальные управления должны быть подчинены
некоторым ограничениям, совокупность
которых формирует некоторую область
возможных значений. Обозначим эту
область
![]() и
назовем ее областью допустимых управлений
и
назовем ее областью допустимых управлений
![]() .
В этом случае управления называются
допустимыми и, как правило, являются
кусочно-непрерывными функциями.
Аналогично компоненты вектора состояния
.
В этом случае управления называются
допустимыми и, как правило, являются
кусочно-непрерывными функциями.
Аналогично компоненты вектора состояния
![]() в
общем случае также должны удовлетворять
определенным ограничениям, т.е. вектор
X(t) в пространстве состояний не должен
выходить за пределы некоторой области
Q, называемой областью допустимых
состояний, сокращенно
в
общем случае также должны удовлетворять
определенным ограничениям, т.е. вектор
X(t) в пространстве состояний не должен
выходить за пределы некоторой области
Q, называемой областью допустимых
состояний, сокращенно
![]() .
.
Пусть в области Q можно выделить некоторую
подобласть
![]() состояний
состояний
![]() ,
которые для нас по каким-то причинам
являются желательными. Цель управления
заключается в том, чтобы перевести
объект из начального состояния
,
которые для нас по каким-то причинам
являются желательными. Цель управления
заключается в том, чтобы перевести
объект из начального состояния
![]() ,
в котором он находится в момент
,
в котором он находится в момент
![]() ,
в конечное состояние
,
в конечное состояние
![]() ,
принадлежащее подобласти
,
принадлежащее подобласти
![]() области
допустимых состояний, т.е.
области
допустимых состояний, т.е.
![]() .
Момент
.
Момент
![]() ,
соответствующий моменту попадания
объекта в желаемое конечное состояние,
может быть неизвестным.
,
соответствующий моменту попадания
объекта в желаемое конечное состояние,
может быть неизвестным.
Для достижения цели управления на вход
объекта необходимо подать соответствующее
управление. Задача управления заключается
в том, чтобы в области допустимых
управлений подобрать такое значение,
при котором достигнута цель. Иными
словами требуется отыскать такое
допустимое управление
![]() ,
определенное на временном отрезке
,
определенное на временном отрезке
![]() ,
при котором уравнение объекта при
заданном начальном состоянии и известном
векторе F(t) имеет решение X(t), удовлетворяющее
ограничению
,
при котором уравнение объекта при
заданном начальном состоянии и известном
векторе F(t) имеет решение X(t), удовлетворяющее
ограничению
![]() при
всех
при
всех
![]() и
конечному условию
и
конечному условию
![]() .
.