

Анализ качества регулирования.
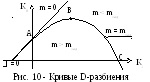
Примерный вид кривой равного значения m в плоскости параметров ПИ-регулятора приведен на рис. 10. Любой точке на этой кривой соответствует переходный процесс с заданной степенью колебательности. Однако качество регулирования существенно зависит от выбора рабочей точки (от значений К0и К1).
Каждой точке кривой соответствует определенное значение корня смещенного уравнения , а каждому, в свою очередь, соответствует пара комплексно-сопряженных корней s = -jнесмещенного уравнения.
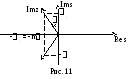
Из рис. 11 находим
(30)
1=1 sin;
s1, 2= -1 sin+ j1 cos
П
(31)
Период колебания этой составляющей равен
Т
(32)![]() .
.
Время затухания этой составляющей приблизительно равно 3Т, что может служить оценкой времени регулирования системы
Т
(33)![]() =
=![]()
Рассмотрим несколько точек на кривой m = m зад .(рис. 10).Точке А соответствует И – регулятор, т.к. К1= 0 и Wp (p) = K0 /p. И – регулятору соответствует минимальное значение частоты 1 = cos и наиболее длительный переходный процесс. Точке С соответствует П-регулятор, так как К0 = 0 и Wp(s) = K1 , максимальная частота 3 =3 cos и соответственно более быстрый переходный процесс. Однако в системе с П- регулятором имеется статическая ошибка, что не всегда допустимо. В качестве рабочей точки (оптимальные значения К0 и К1) чаще всего выбирается точка В , соответствующая К0 max , или точка, лежащая несколько правее. При этом переходный процесс протекает с меньшей частотой, чем в случае П-регулятора, но при этом отсутствует статическая ошибка.
Вопросы самоконтроля:
Дайте определение степени колебательности.
Дайте понятие корневых критериев качества.
Каков порядок определения параметров системы (регулятора) по заданной степени колебательности.
В чем заключается метод смещенного уравнения.
Каков порядок построения областей равной степени колебательности в плоскости параметров системы
В чем заключается анализ качества регулирования.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003
Тема 7. Коррекция систем автоматического управления Лекция 31
Цель лекции: изучение частотных критериев качества, построение желаемых ЛАЧХ САУ.
Задачи лекции:
Понятие частотных критериев качества САУ.
Графическое построение желаемых ЛАЧХ САУ.
Использование номограммы Солодовникова для построения желаемых ЛАЧХ САУ.
Желаемый результат:
Студенты должны знать:
Порядок построения желаемых ЛАЧХ САУ;
порядок расчета частоты среза желаемых ЛАЧХ САУ;
Порядок расчета сопрягаемых частот желаемых САУ;
Порядок использования метода трапеций для изучения частотных критериев качества.
Учебный материал Частотные оценки качества сар
Переходный процесс замкнутой системы полностью определяется ее передаточной функцией и амплитудо-фазовой характеристики, которую можно разделить на действительную вещественную и мнимую.
Ф(jw)=Uф(w)+jVф(w)
Каждой АФХ соответствует действительная частотная характеристика Uф(w), которая зависит от коэффициента диф.ур., поэтому действительная частотная характеристика замкнутой системы однозначно определяет характер ее переходного процесса. Переходным процессом в линейных системах применим закон суперпозиции, т.е. если входное воздействие представить как сумму составляющих воздействий и найти уравнение или построить кривые переходных процессов в системе для каждой составляющей, то переходный процесс, создаваемый входным воздействием в целом будет равен сумме переходных процессов для всех составляющих воздействий.
На этом основана методика определения переходного процесса по действительной частотной характеристике замкнутой системы при поступлении на ее вход единичного ступенчатого воздействия.
Пример:
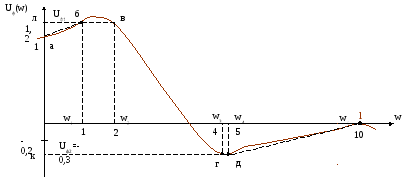
Рис.1
Предложим, что входное воздействие, приложенное к системе состоит из отдельных составляющих действительной частотной характеристики, для каждой из которой имеют вид трапеции. При этом две стороны трапеции совпадают с осями w и Uф(w) , третья параллельная ось w, а четвертая наклонна. Выбор трапеции в качестве формы, составляющих действительных частотных характеристик определяется:
1. Действительные частотные характеристики реальных систем регулирования легко разделяются на небольшое число трапециидальных составляющих.
2. Вычисление ординат кривой переходного процесса для трапецеидальной действительной частотной характеристики достаточно просто и облегчает оспользование таблиц.
3. Точность расчета достаточно велика.
Т.к. сумма переходных процессов от отдельных составляющих образует переходный процесс системы в целом, то сумма составляющих действительных частотных характеристик, имеющих форму трапеции, образует действительную частотную характеристику системы.
Т.о.
приняв трапециидальную форму действительной
частотной характеристики за типовую и
составив таблицы ординат кривых
переходного процесса
![]() для единичных трапеций с различными
наклонами четвертой стороны можно с
помощью таблиц и простых пересчетов
построить переходные процессы для
каждой составляющей действительные
частотные характеристики и сумма их
ординаты получить кривую переходного
процесса в замкнутой системе.
для единичных трапеций с различными
наклонами четвертой стороны можно с
помощью таблиц и простых пересчетов
построить переходные процессы для
каждой составляющей действительные
частотные характеристики и сумма их
ординаты получить кривую переходного
процесса в замкнутой системе.

Рис.2
Л юбая
трапециидальная действительная
характеристика характеризуется
параметрами:
юбая
трапециидальная действительная
характеристика характеризуется
параметрами:
1. Высотой Uф0
2. Интервалом пропускания частот w0
3.
Коэффициент наклона
![]()
![]()
4. Интервал равномерного пропускания частот wd
Для
типовой трапеции Uф0=1;
w0=1,
поэтому единичная трапеция характеризуется
только коэффициентом наклона
![]()
Для
единичных трапеций с различными
величинами коэффициента наклона могут
быть вычислены ординаты переходного
процесса в виде
![]() ,
где
,
где![]() и называется безразмерным параметром
времени, следует, что
и называется безразмерным параметром
времени, следует, что![]() для
единичной трапеции
для
единичной трапеции![]() =1t=t.
=1t=t.
Величина
ординат переходного процесса вычисленных
для различных процессов
![]() и
и![]() -
называетсяh-функциями.
h-функции
в таблицах.
-
называетсяh-функциями.
h-функции
в таблицах.
Для
перехода от h
функции к переходной функции x(t)
соответствующей данной составляющей
действительной трапециидальной частотной
характеристики, с тем же коэффициентом
наклона
![]() ,
но с высотойUф0
не равно 1 и полосой пропускания частот
w0
не равно
0. Uф0(w),
а для перехода к новому значению времени
необходимо учесть, что
,
но с высотойUф0
не равно 1 и полосой пропускания частот
w0
не равно
0. Uф0(w),
а для перехода к новому значению времени
необходимо учесть, что
![]() ,
следовательно,t=
,
следовательно,t=![]() /w0,
x(t)=Uф0h(
/w0,
x(t)=Uф0h(![]() /w0).
/w0).
На рис.1 выполнена разбивка действительной частотной характеристики, которая отдельно представлена на рис.2. Эти характеристики расположены так, что их основание кг, ое, и лб совпадают с осью w. Данная характеристика Uф(w) может быть замена тремя составляющими: лвгк, лба, кдео, которая характеризуется параметрами:
UФ01=Uф1-Uф2=1,2+0,3=1,5
wd1=w2=2 w01=w3=4 ![]() =0,5
=0,5
Uф02=Uф0-Uф1=1-1,2=-0,2
Wd2=0 w02=w1=1,5
![]() =0
=0
Uф03=Uф2=-0,3 wd3=w4=5 w03=5 w03=w5=10
![]()
По
таблицам h
функций находим значения ординат
переходной функции h(![]() )
для единичных трапециидальных частотных
хар-к при
)
для единичных трапециидальных частотных
хар-к при![]() .
.
По
h
функции для
![]() находим переходные функции соответствующие
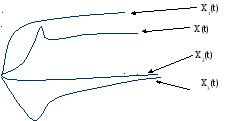
первой трапецииx1(t)
и x3(t)
по h
функции, для
находим переходные функции соответствующие
первой трапецииx1(t)
и x3(t)
по h
функции, для
![]() находим переходные функции соответствующиеx2(t)
, результаты сводим в таблицу, где
находим переходные функции соответствующиеx2(t)
, результаты сводим в таблицу, где
![]() ,h
для
,h
для
![]() и
и![]() взятые из таблице.
взятые из таблице.
x1(t)=Uфо1h(![]() )
)
x2(t)=Uфо2h(![]() )
)
x3(t)=Uфо3h(![]() )
)
t1=![]()
|
|
h( |
h( |
x1(t) |
x2(t) |
x3(t) | |||
|
|
|
|
t1 |
x1 |
t2 |
x2 |
t3 |
x3 |
|
0 1 2 . . . 25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вопросы самоконтроля:
На чем основана методика определения переходного процесса по действительной частотной характеристике замкнутой системы при поступлении на ее вход единичного ступенчатого воздействия?
Чем определяется выбор трапеции в качестве формы, составляющих действительных частотных характеристик?
Какими параметрами характеризуется любая трапециидальная действительная характеристика?
Как определяется частота среза желаемой ЛАЧХ САУ?
Как применяется номограмма Солодовникова для построения желаемой ЛАЧХ САУ?
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003