

Определение параметров системы (регулятора) по заданной степени колебательности.
Задача выбора параметров заданной системы из условия заданной степени колебательности аналогична задаче об устойчивости. И в том, и в другом случае накладываются ограничения на область расположения корней характеристического уравнения. Различие заключается лишь в конфигурации областей (левая полуплоскость – устойчивость; сектор АОВ на рис. 4 – степень колебательности). Для определения параметров системы из условия m mзад. может быть использован метод смещенного уравнения.
Метод смещенного уравнения.
Пусть характеристическое уравнение замкнутой системы имеет вид
a
(14)
Повернем оси координат плоскости S на угол = arctg m зад. против часовой стрелки (рис. 5) и введем новую переменную .
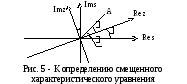
Запишем координаты точки А (рис.5) относительно новых и старых осей координат:
(15)![]() s
=
s
=
![]()
Так
как
![]() ,
то из (15) следует
,
то из (15) следует
s
= A1
![]() .
= A1
.
= A1
![]() =
А1
=
А1
![]()
Отсюда находим связь между координатами s и z
s
(16)![]()
Подставляя
s
=
![]() в
характеристическое уравнение замкнутой
системы, получим
в
характеристическое уравнение замкнутой
системы, получим
a
(17)
и
(18)
An.zn + An-1.zn-1 + … + A1.z + A0 = 0,
где Ak = ak. ejk.
Уравнение (18) является характеристическим уравнением системы в новых осях координат и называется смещенным характеристическим уравнением.
Отметим, что коэффициенты А к - комплексные числа. Будем называть систему устойчивой в новых координатах, если ее корни лежат левее новой мнимой оси (необходимо иметь в виду, что при повороте осей расположение корней не изменяется, а изменяются лишь их координаты). Для оценки устойчивости системы может быть использован критерий Михайлова.
Теорема. Если система устойчива в новой системе координат, то ее степень колебательности m tg .
Другими словами, все корни характеристического уравнения лежат в заштрихованной области (рис. 6).
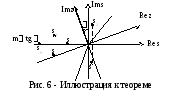
Доказательство.
Для действительных корней это очевидно. Пусть теперь один из комплексных корней, например, s1 (рис. 6) расположен вне заштрихованной области, тогда сопряженный ему корень s2 будет лежать в области неустойчивости, что противоречит первоначальному предположению. С другой стороны, для комплексно-сопряженных корней, расположенных в заштрихованной области, условие устойчивости всегда выполняется. Таким образом, условие устойчивости системы в новых координатах эквивалентно условию m tg . Причем знак равенства соответствует границе устойчивости.
Условия устойчивости в новых координатах могут быть использованы для определения параметров системы.
Построение областей равной степени колебательности в плоскости параметров системы
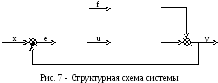
Предположим, что некоторые параметры системы регулирования (например, параметры регулятора) могут изменяться. Найдем область изменения варьируемых параметров, при которых m m зад. Решение задачи проведем методом D-разбиения на примере системы, структурная схема которой приведена на рис. 7.
![]()
![]()
![]()
Будем считать, что параметры ПИ-регулятора К0 и К1 могут изменяться. Требуется найти область изменения К0 и К1, при которых m m зад. Передаточная функция разомкнутой системы
W
(19)![]()
Характеристическое уравнение замкнутой системы имеет вид:
К
(20)
Сделав
замену s
= z
еj
![]() ,
где
= arctg m зад.,
,
где
= arctg m зад.,
запишем смещенное уравнение
К
(21)
Для выполнения условия m = m зад., как было показано выше, необходимо, чтобы система находилась на границе устойчивости в новых осях координат. Иными словами, смещенное уравнение (21) должно иметь чисто мнимые корни z = j .
Построив границу D-разбиения для смещенного уравнения (21) в плоскости параметров К0 и К1 , получим всю совокупность значений К0 и К1, при которых m = m зад. (рис. 8). Граница D-разбиения является линией равного m. В частном случае при m = 0 имеем границу области устойчивости.
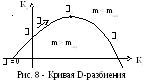
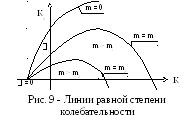
Для практических целей достаточно ограничиться положительными значениями К0и К1. Задаваясь различными значениями m, можно построить семейство линий равной степени колебательности (рис. 9), что позволяет производить выбор параметров регулятора.
Рассмотрим последовательность построения линий заданного значения m. Подставим в уравнение (21) z = j и ej k = cos k+ j sin k, получим уравнение границы D-разбиения
(22)
- a1 2 (cos 2 + j sin 2) – a2 j 3(cos 3 + j sin 3) = 0
Раскрывая скобки и приравнивая к нулю вещественную и мнимую части уравнения (22), получим систему с двумя неизвестными:
(23)![]()
 -К1 Кy sin+ К0 Кy
–а 0sin- a1 2cos 2+а2 3sin 3= 0
-К1 Кy sin+ К0 Кy
–а 0sin- a1 2cos 2+а2 3sin 3= 0
К1 Кy сos+ а 0cos- a1 2sin 2- а2 3cos 3= 0
Необходимо помнить, что при таком выборе осей координат, как на рис. 8 и 9, первым записывается параметр К1и уравнение для вещественной части. Решая систему (23) при различных значениях, найдем границу Д- разбиения. Решение удобно искать с помощью определителей
К
(24)![]() ;
К2=
;
К2=![]() ;
;
г
 де
-ку sinку
де
-ку sinку
= = - Ky2cos;
к у сos0
(25)

1 = =
(- а 0 cos + a 1 2 sin 2 + а 2 3 cos 3 ) 0
= (а 0 cos - a 1 2 sin 2 - а 2 3 cos 3 );

 -sinку( a0 sin + а12cos 2- а2 3sin 3)
-sinку( a0 sin + а12cos 2- а2 3sin 3)
2= =
cos ку(-а0 сos+ a1 2sin 2+ а2 3cos 3)
= - а1 3 (cos cos 2 + sin sin 2)к у-
- а 2 4 (sin cos 3 - cos sin 3)к у =
= -(a 1 3 cos - a 2 4 sin 2 ) ку .
Подставив значения,1 и2в (24), найдем К1и К0как функции:
(26)![]() + а2 2
+ а2 2 ![]() )
)![]()
К0=2( a1- 2а2sin) / ку .
Изменяя в пределах от 0 до, построим кривую D-разбиения. В частном случае для m = 0 (= 0) из (26) найдем уравнение границы области устойчивости
(27)
К0= а1 2) / ку
или
(28)![]()
Для облегчения расчетов в табл. 2 приведены значения sin k, cos kдля различных значений m .
Уравнения (26), (27) можно
получить по-иному, кривая D-разбиения
является отображением мнимой оси z = j![]() на плоскость коэффициентов К1,
К0. Уравнение прямой z = jв старых координатах имеет вид
на плоскость коэффициентов К1,
К0. Уравнение прямой z = jв старых координатах имеет вид
s
(29)
Подставляя в несмещенное характеристическое уравнение значение корня s = - m + jи проделав соответствующие преобразования, получим уравнения, аналогичные (26), (27), но являющиеся функциями частоты.
Второй способ требует более громоздких вычислений, и им целесообразно пользоваться при невысоком порядке характеристического уравнения.