

Учебный материал Нелинейные системы автоматического управления
Нелинейная автоматическая система- система, которая содержит хоты бы одно звено, описываемое нелинейным уравнением.
Уравнение является нелинейным, если некоторые координаты или их производные по времени входят в уравнение в виде произведений или степени, отличной от первой, также, если коэффициенты уравнения являются функциями некоторых координат или их производных. Основные задачи исследования нелинейных автоматических систем сводят к отыскания возможным состояний равновесия системы и исследованию их устойчивости, определению периодических движений и анализу их устойчивости, исследованию процессов перехода системы к тому или иному установившемуся состоянию при различных начальных состояниях. Начальные исследования нелинейных систем связано с рассмотрением устойчивости и определению на автоколебания.
Классификация нелинейных звеньев и систем.
По признаку:
1. по физическим принципам действия
2. по способам аппроксимации
3. по статическим и динамическим характеристикам
В практике автоматических систем часто встречаются следующие нелинейные звенья:
1. с гладкой нелинейной характеристикой
2. с кусочно-линейной характеристикой (релейного типа, зононечувствительности, с насыщением)
3. описываемые уравнениями, которые содержат произведение переменных или их производные и другие их комбинации
4. логические нелинейные звенья
Различают статические и динамические нелинейности.
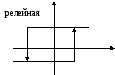
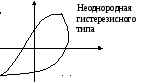
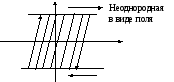
Первые представляются в виде нелинейных статических характеристик. Вторые – в виде нелинейных диф.ур. с переменными коэффициентами при производных. Статические характеристики нелинейных звеньев могут быть однозначными, неоднозначными релейными, сложными неоднозначными в виде поля.

Все нелинейные звенья делят на аналитические (аналитические описания нелинейные характеристики) и неаналитические (характеристика, описывается с указанием логических условий). Указанные нелинейности могут быть разделены на сопутствующие и преднамеренные. В зависимости от этого нелинейные САУ делятся на 2 группы:
1) с сопутствующими нелинейностями, т.е. нелинейности, проектированные как линеаризованные, но из-за наличия насыщения люфта, мертвого хода, сухого трения, являющиеся практически нелинейными.
2) с преднамеренными нелинейностями, т.е. проектируемые по заданию как нелинейные.
В нелинейных системах выделяют: линеаризованные нелинейные системы, существенно нелинейные (НС).
Если нелинейность системы определяется незначительными величинами люфта насыщения усилителя, то поведение такой системы в ряде случаев на отличается от поведения линейной модели этой системы , следовательно, система может рассматриваться как линеаризованная. При наличии существенных нелинейностей, поведения нелинейной системы значительно отличается от поведения ее линейной модели. Из-за нелинейности характеристик такой системы выходная переменная непропорциональна входной, следовательно, форма реакции системы на скачкообразный сигнал будет зависеть от величины этого сигнала. Для ряда нелинейных систем изменение величины входного сигнала может привести к превращению устойчивого переходного процесса к неустойчивому и наоборот. Характер процессов в нелинейной системе часто зависит от величины начального отклонения, вызванного возмущением.
В связи с этим для нелинейных систем существует понятие об устойчивости в малом, в большом и в целом.
Система устойчива в малом, если она устойчива только при малых (бесконечно малых) начальных отклонениях. Система устойчива в большом, если она устойчива при любых больших (конечных по величине) начальных отклонениях. Система устойчива в целом, если она устойчива при любых больших (неограниченных по величине) начальных отклонениях.
Для нелинейных систем характерен режим незатухающих колебаний, возникающий в автоматических системах при отсутствии периодических внешних воздействий за счет внутренних свойств системы. Эти колебания могут быть как устойчивыми так и неустойчивыми.
Устойчивые колебания нелинейных систем называется автоколебаниями.
Если колебания в нелинейной системе устанавливаются в результате периодических внешних воздействий, то они называется вынужденными.
Особенностью вынужденных периодических режимов нелинейных систем является то, что амплитудо-частотная характеристика в замкнутой системе иметь резонансный пик.
Другой особенностью динамики нелинейных систем является то, что при затухающих колебаниях переходного процесса происходит изменение периода колебания.
Вопросы самоконтроля:
Дайте определение нелинейной системе автоматического управления.
Проклассифицируйте нелинейные система по способам аппроксимации.
Проклассифицируйте нелинейные система по статическим и динамическим характеристикам.
Проклассифицируйте нелинейные система по физическим принципам действия.
Назовите виды статических характеристик нелинейных звеньев.