

Измерительные и исполнительные устройства
Помимо основных функциональных элементов - объекта и управляющего устройства (регулятора) в системе автоматического управления присутствуют также измерительные и исполнительные устройства.
Измерительные
устройства служат для получения
информации о поведении объекта. При
использовании принципа обратной связи
эта информация в виде некоторых сигналов
![]()
![]() ,
которые мы называем измеряемыми
переменными, подается в регулятор.
Отметим, что наряду с полезной информацией
сигналы, поступающие в регулятор,
содержат помехи измерений
,
которые мы называем измеряемыми
переменными, подается в регулятор.
Отметим, что наряду с полезной информацией
сигналы, поступающие в регулятор,
содержат помехи измерений![]()
![]() ,
которые мы называем измеряемыми
переменными, подаётся в регулятор.
Отметим, что наряду с полезной информацией
сигналы, поступающие в регулятор,
содержат помехи измерений
,
которые мы называем измеряемыми
переменными, подаётся в регулятор.
Отметим, что наряду с полезной информацией
сигналы, поступающие в регулятор,
содержат помехи измерений![]() .
.
В
общем случае комплекс измерительных
средств системы автоматического
управления сам по себе является
динамической системой и описывается
дифференциальными уравнениями, подобными
уравнениям объекта (1.4.1). Входами этой
системы является переменные состояния
объекта
![]() и помехи измерений
и помехи измерений![]() ,
а выходами - измеряемые переменные
,
а выходами - измеряемые переменные![]() .
Однако, в тех случаях, когда динамикой
измерительных устройств пренебрегать
нельзя, дифференциальные уравнения
измерителей относят к уравнениям
объекта, а для описания выходных
переменных измерителей используют
алгебраические уравнения
.
Однако, в тех случаях, когда динамикой
измерительных устройств пренебрегать
нельзя, дифференциальные уравнения
измерителей относят к уравнениям
объекта, а для описания выходных
переменных измерителей используют
алгебраические уравнения
![]() ,
(1.6.1)
,
(1.6.1)
где
![]() - в общем случае нелинейная и нестационарная
вектор - функция.
- в общем случае нелинейная и нестационарная
вектор - функция.
Отметим,
что в системах с обратной связью на вход
регулятора подаются сигналы, отражающие
разность между заданным
![]() и истинным
и истинным![]() состояниями объекта. В этом случае
уравнения (1.6.1) удобнее записывать в
виде
состояниями объекта. В этом случае
уравнения (1.6.1) удобнее записывать в
виде
![]() ,
(1.6.2)
,
(1.6.2)
где
![]() - вектор отклонений от заданного движения.
- вектор отклонений от заданного движения.
Запишем уравнения (1.6.2) в скалярной форме, предполагая для простоты, что параметры измерителей не зависят от времени
![]() ,
,
![]() .
(1.6.3)
.
(1.6.3)
Каждое
из этих уравнений является уравнением
какого-то конкретного измерительного
устройства, предназначенной для измерения
определенной физической переменной
![]()
![]() ,
связанной с вектором отклонений
,
связанной с вектором отклонений![]() (либо с вектором состояний
(либо с вектором состояний![]() )
линейным соотношением
)
линейным соотношением
![]() ,
(1.6.4)
,
(1.6.4)
где
![]() - матрица - строка размеров
- матрица - строка размеров![]() .
Тогда вместо (1.6.3) можно записать
.
Тогда вместо (1.6.3) можно записать
![]() ,
,
![]() .
(1.6.5)
.
(1.6.5)
В
этих уравнениях функции
![]() представляют собой статические
характеристики измерителей. Наиболее
типовые из них представлены на рис.
1.16.
представляют собой статические
характеристики измерителей. Наиболее
типовые из них представлены на рис.
1.16.
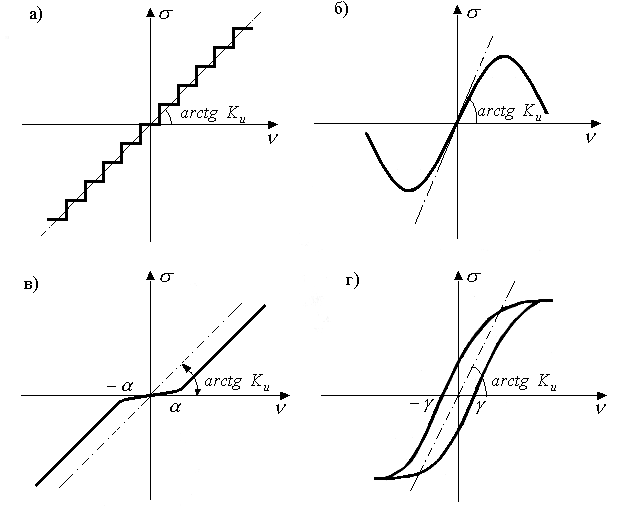
Рис. 1.16
Релейной характеристикой (рис. 1.16,а) обладают потенциометрические датчики углов, линейных перемещений, цифровые датчики. Синусоидальную характеристику (рис. 1.16, а) имеют сельсинные пары, вращающиеся трансформаторы. Зона нечувствительности (рис. 1.16, в) характерна для большинства измерителей, разница состоит лишь в величине этой зоны. Гистерезисную характеристику (рис. 1.16, б) имеют некоторые типы электромагнитных и индукционных датчиков.
Отметим, что при проектировании систем управления измерители выбирают так, чтобы диапазон измерения приходился на линейный участок статической характеристики, а возможные нелинейные эффекты были незначительны.
В связи с этим для описания измерительных устройств часто используют линейные уравнения, которые в векторно-матричной форме можно записать так:
![]() ,
(1.6.6)
,
(1.6.6)
где
![]() - матрица размеров
- матрица размеров![]() ,
элементами которой являются коэффициенты
передачи измерителей.
,
элементами которой являются коэффициенты
передачи измерителей.
Исполнительное устройство служит для передачи и преобразования управляющих воздействий на объект управления. К ним относятся различного рода (электрические, гидравлические, пневматические) приводы, регулирующие дроссели, клапаны, нагревательные элементы и т.д. Часто роль исполнительных устройств выполняют усилители мощности.
Так же как измерители, исполнительные устройства относятся к неизменяемой части системы, и поэтому при составлении модели системы управления их собственную динамику обычно относят к объекту управления.
Статические
характеристики
![]() ,
,![]() исполнительных устройств, как правило,
нелинейные. Наиболее типовые из них
представлены на рис. 1.17.
исполнительных устройств, как правило,
нелинейные. Наиболее типовые из них
представлены на рис. 1.17.

Рис. 1.17. а) насыщение; б) насыщение с зоной нечувствительности;
в) насыщение с нечувствительностью и гистерезисом; г) люфт
Некоторые усилители мощности (магнитные, электромашинные) имеют гистерезисную характеристику рис.1.16 г. Кроме того, встречаются релейные исполнительные устройства с характеристиками рис. 1.15.
Отметим, что некоторые из представленных на рис. 1.16, 1.17 нелинейных характеристик могут принадлежать не только измерительным и исполнительным устройствам, но также и другим элементам системы управления, в частности объекту.
Вопросы самоконтроля:
Дать определение регулятора.
Дать определение задающего воздействия.
Дать определение измерительного устройства.
Дать определение исполнительного устройства.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003