

Лекция 9.
Цель лекции: изучить расчет передаточной функции последовательного соединения звеньев; параллельного соединения звеньев; последовательно-параллельного соединения звеньев; расчет передаточной функции системы по возмущающему воздействию; расчет передаточной функции системы по ошибке.
Задачи лекции:
Последовательное соединение звеньев системы автоматики.
Параллельное соединение звеньев автоматики.
Последовательно-параллельное соединение звеньев автоматики.
Расчет передаточной функции системы с воздействие возмущения.
Расчет передаточной функции системы по ошибке рассогласования.
Желаемый результат:
Студенты должны знать:
Порядок расчета передаточной функции параллельного соединения звеньев САУ;
Порядок расчета передаточной функции последовательного соединения звеньев САУ;
Порядок расчета передаточной функции последовательно-параллельного соединения звеньев САУ;
Порядок расчета передаточной функции последовательного САУ по возмущению;
Порядок расчета передаточной функции последовательного САУ по ошибке рассогласования.
Учебный материал Передаточные функции сау
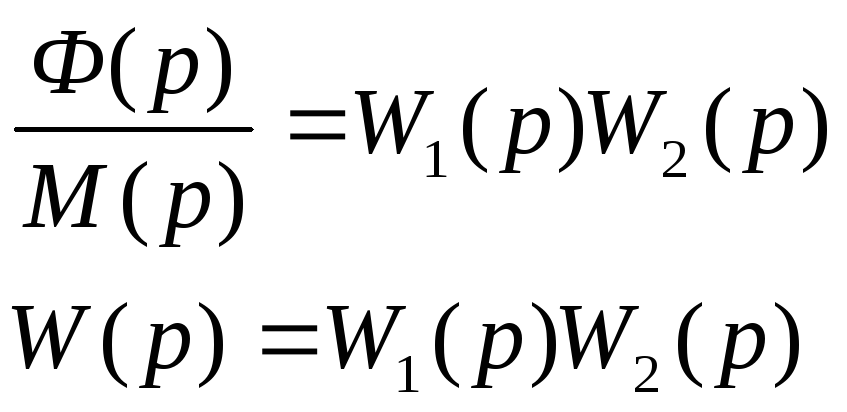
1. Система с последовательным соединением звеньев

Ф1(р)=W1(p)M1(p)
Ф2(р)=W2(p)M2(p)
M(p)=M1(p)
Ф1(р)=M2(p)
Ф2(р)=Ф(р)
Ф(р)=W2(p)Ф1(p)=W2(p)W1(p)M1(p)=M(p)W1(p)W2(p)
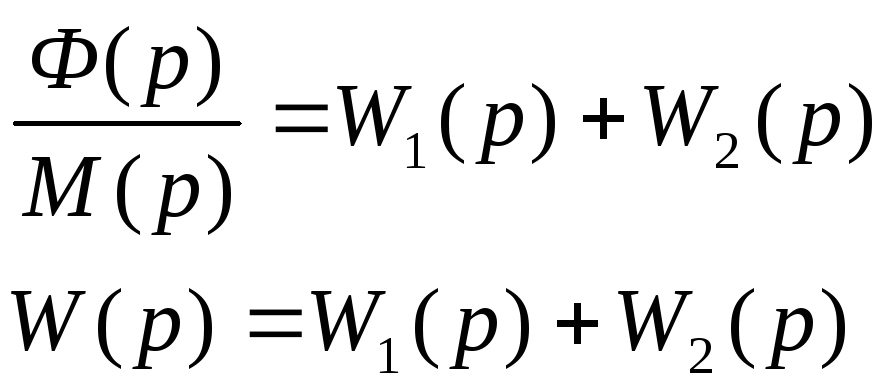
2. Параллельное соединение звеньев.
W1 W2
![]()
![]() Y
Y






![]() Y1
Y1
![]() Yn
Yn
![]() X1
X1

![]() Xn
Xn
Ф1(р)=W1(p)M1(p)
Ф2(p)=W1(p)M2(p)
Ф(p)=Ф1(р)+Ф2(р)=W1(p)M1(p)+W2(p)M2(p)
M(p)=M1(p)=M2(p)
Ф(p)=M(p)[W1(p)+W2(p)]
3. Встречно-параллельное соединение звеньев (или ОС)
W1 W2

![]()
![]() Y1
Y1![]()




![]() X2
X2
![]() X1
X1![]() Yn
Yn

W(p)=![]()
![]()
W1(p)- передаточная функция в цепи прямой связи
W2(p) – передаточная функция цепи ОС.
+ для отрицательной ОС
- для положительной ОС
Все рассмотренные типовые звенья могут быть объединены к различным соединениям двух элементарных звеньев: пропорционального и интегрирующего. Схема замещения сведем в таблице.
Формула, полученная для схемы с n-встречными включением схемы (схема с ОС) справедлива, когда внешнее воздействие поступает на вход системы управления, однако, кроме управляющего входного воздействия реальная система подвержена возмущающим воздействием, которые могут поступать на систему в любом месте и влиять на выходную величину.
Рассмотрим структурную схему и возмущающим воздействиями
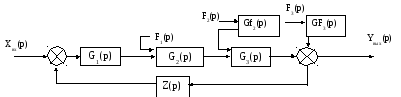
Прямая цепь системы состоит из передаточных функций G1(p)….
На входы двух последних звеньев поступает возмущающее воздействие F1(p) и F2(p) суммирующиеся с соответствующими величинами предыдущих звеньев. Возмущение F3(p) действует на выходную величину системы, что обозначено на схеме элементом суммирования. При этом принципиально важно, что место приложения F3(p) охвачено ОС, что т.е. на звено Z(p) поступает выходная величина системы, с учетом действия F3(p) таким образом управляющая величина системы, искаженная F3(p) корректируется ОС. Возмущающее воздействие F2(p) и F3(p) поступает на вход звеньев прямой цепи через дополнительные звенья с передаточными функциями Gf2(p) и Gf3(p), которые отражают характер зависимости системы от конкретного возмущающего воздействия. Определим зависимость САУ от возмущающих воздействий. В силу линейности рассматриваемых систем управления к ней применим принцип наложения, дающий возможность определить общую реакцию системы, т.е. изменение выходной величины как сумма частных реакций от каждого из внешних воздействий в отдельности.
Пусть Xвых(р)=0; F2(p)=0; F3(p)=0 определим зависимость Yвых от F1(p). На вход звена G2(p) действует сумма сигналов F1(p)+G1(p)[0-Z(p)Yвых(p)], которая, пройдя звенья G2(p) и G3(p), доставит на выходе значение:
Yвых(p)=G2(p)G3(p)[F1(p)-G1(p)Z(p)Yвых(р)] (1)
Решив уравнение относительно Yвых(р) получим:
![]() ,
где
,
где
W(p)=G1(p)G2(p)G3(p)Z(p) полученный результат обобщим в виде следующего правила:
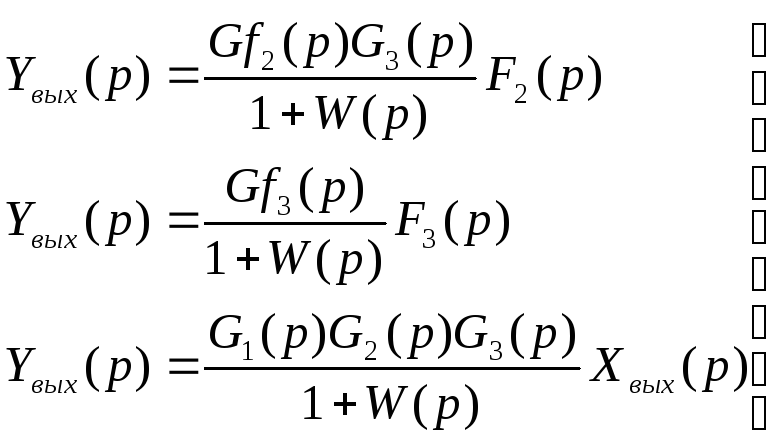
Операторное выражение выходной величины системы равно дроби, числитель которой есть произведение изображения внешнего воздействия на передаточные функции звеньев, включенных последовательно между точкой приложения внешнего воздействия и выхода системы, а знаменатель, это увеличенное на одну передаточную функцию разомкнутой системы.
 передаточные
функции по возмущению
передаточные
функции по возмущению
При одновременном воздействии всех возмущений выходная величина системы есть сумма полученных частных воздействий.
![]()
Из выражения можно получить выражение передаточной функции по выходной величине и по ошибке. Особенностью является передача Yвых(р) к элементу сравнения, т.е. на вход системы с коэффициентом передачи равным единице.
Основным видом внешних воздействий в следящей системе считается входное управляющее воздействие Xвых(р) отрабатывают систему с некоторой ошибкой рассогласования.
Определение передаточной функции по ошибке рассогласования:
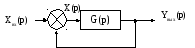 X(p)=Xвх(p)-Yвых(p)
X(p)=Xвх(p)-Yвых(p)
Учитывая, что Z(p)=1
W(p)=G(p), G(p)-передаточная функция прямой цепи
W(p)- передаточная функция разомкнутой системы, которая будет иметь вид:
*Wз(p)=![]() -передаточная
функция следящей системы по выходной
величине.
-передаточная
функция следящей системы по выходной
величине.
В силу линейности преобразований Лапласа операторное изображение ошибки входного и выходного сигнала связаны межде собой также как и оригиналы.
X(p)=Xвх(p)-Yвых(p); Yвых(p)=Xвх(p)-X(p) **
Подставим ** в *, получим:
![]() выражение
передаточной функции по ошибке
выражение
передаточной функции по ошибке
Вопросы самоконтроля:
Дать порядок расчета передаточной функции системы с последовательным соединением звеньев автоматики.
Дать порядок расчета передаточной функции системы с параллельным соединением звеньев автоматики.
Дать порядок расчета передаточной функции системы с последовательно-параллельным соединением звеньев автоматики.
Дать порядок расчета передаточной функции системы по возмущающему воздействию.
Дать порядок расчета передаточной функции системы по ошибке.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003