

Тема 6. Качество процессов управления Лекция 27
Цель лекции: изучение показателей качества процессов управления.
Задачи лекции:
Рассмотреть показатели качества САУ.
Правила расчета показателей качества САУ.
Желаемый результат:
Студенты должны знать:
Определение показателей качества САУ;
Правила расчета показателей качества САУ по переходным процессам различного вида.
Учебный материал Качество процессов управления
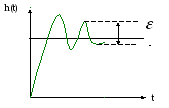
Устойчивость системы является необходимым, но не достаточным условием ее работоспособности. САР должна обеспечивать качество процесса управления при переходе с одного режима работы на другой. Понятие качества процесса управления объединяет комплекс требований для установившегося и переходного процесса отработки заданного процесса. На вход системы подается единичное ступенчатое воздействие для определения заданного качества.
В общем случае к числу характеристик относятся:
1)
Время регулирования tp
– это время, в течении которого начиная
с момента приложения воздействия на
систему отклонение регулируемой величины
![]() h(t)
от ее установившегося значения h0=h(
h(t)
от ее установившегося значения h0=h(![]() )
будут больше наперед заданного значения
)
будут больше наперед заданного значения![]() .
По истечению времени регулирования
отклонение регулируемой величины от
установившегося значения должно быть
не более 5% (
.
По истечению времени регулирования
отклонение регулируемой величины от
установившегося значения должно быть
не более 5% (![]() )
)
Т.о. время регулирования определяет быстродействие переходного процесса.
2)
Перерегулирование
![]() - этоmax
отклонение
- этоmax
отклонение
![]() регулируемой величины от установившегося
значения, выражение в % отh0.
Абсолютная величина
регулируемой величины от установившегося
значения, выражение в % отh0.
Абсолютная величина
![]() определяется из кривой переходного
процесса
определяется из кривой переходного
процесса![]() =
=![]() -h(
-h(![]() )
)
Перерегулирование
![]() %=
%=![]()
![]() =0,05h(
=0,05h(![]() )
)
 2,6-1=1,6
2,6-1=1,6
3) Установившаяся ошибка
Установившееся
значение выходной величины h(![]() )
в общем случае может несколько отличаться
от заданного значения регулирования
на величину установившейся ошибки
)
в общем случае может несколько отличаться
от заданного значения регулирования
на величину установившейся ошибки![]() .
Величина установившейся ошибки по
регулирующему воздействию равняется
.
Величина установившейся ошибки по
регулирующему воздействию равняется![]() ,
гдеq0
– постоянное регулирующее воздействие;
kоб
- коэффициент передачи объекта; kр
– коэффициент передачи регулятора.
,
гдеq0
– постоянное регулирующее воздействие;
kоб
- коэффициент передачи объекта; kр
– коэффициент передачи регулятора.
Величина
установившейся ошибки по возмущающему
воздействию для статических объекта и
регулятора определяется:
![]() величина
установившейся ошибки прямо пропорциональна
величине возмущающего воздействия и
коэффициенту передачи объекта
регулирования. Для уменьшения ошибки
величина
установившейся ошибки прямо пропорциональна
величине возмущающего воздействия и
коэффициенту передачи объекта
регулирования. Для уменьшения ошибки![]() увеличим
коэффициент передачи регулятора.
увеличим
коэффициент передачи регулятора.
4) Колебательность. Колебательность системы хар-ся числом колебаний регулирующей величины за время регулирования tp. Если за это время переходный процесс в системе совершает число колебаний < заданного по условиям технологии, то считается, что система имеет требуемое качество регулирования части ее колебательности.
По характеру протекания переходного процесса в системе при единичном ступенчатом воздействии переходные функции подразделяются на переходные функции:
А) с перерегулированием
Б) без перерегулирования
В) монотонные переходные функции

А) Б)

В)
Переходная функция h(t) полностью определяет динамические свойства и качественные показатели САР. Изображение переходной функции замкнутой системы при подаче на ее вход единичного ступенчатого воздействия определяется выражением:
![]() ,
где переходная функция замкнутой системы
по задающему воздействию. Практическое
значение имеет переходная функция,
определяющая изменение по времени
выходной величины при поступлении на
вход объекта первого возмущающего
воздействия.
,
где переходная функция замкнутой системы
по задающему воздействию. Практическое
значение имеет переходная функция,
определяющая изменение по времени
выходной величины при поступлении на
вход объекта первого возмущающего
воздействия.
![]()
Связь между изображениями переходной функции по возмущающему воздействию и по задающему воздействию определяется:
![]() чем
больше передаточный коэффициент
регулятора, тем больше в системе
подавляются возмущающие воздействия.
чем
больше передаточный коэффициент
регулятора, тем больше в системе
подавляются возмущающие воздействия.
Вопросы самоконтроля:
Представьте порядок определения показателей качества по переходному процессу.
Дайте определение времени регулирования tp САУ.
Дайте определение перерегулированию САУ.
Дайте определение установившейся ошибки САУ.
Дайте определение колебательности САУ.
Список литературы по теме лекции:
Бесекерский В.А., Попов Е.П. Теория CAP, М.,2005
Иващенко Н.Н. Автоматическое регулирование, М.,2003