

Важільний механізм з пасивними зв'язками
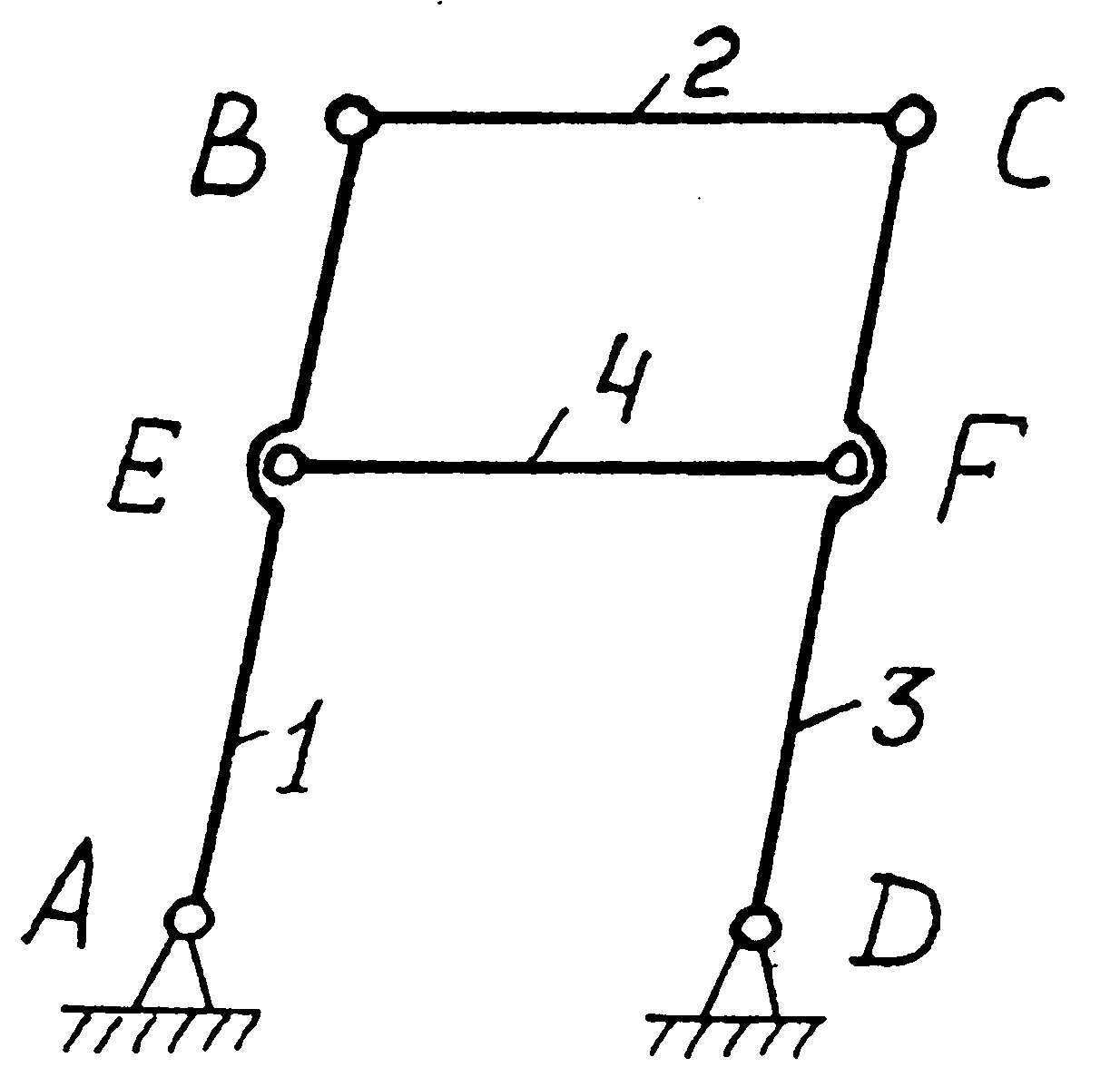
Рис.3.5.
Якщо ланки 1 і 3 з'єднати ланкою ЕF з двома обертальними парами, то ступінь вільності згідно /2.4/
W = 3*4 – 2*6 – 0 = 0 .
Однак, якщо ланка ЕF паралельна ланці ВС, механізм матиме один ступінь вільності, тобто W = І.
Отже, ланка EF вносить пасивні зв'язки і її можна не розглядати.
Інколи, пасивні зв’язки потрібні для забезпечення певності руху, підвищення жорсткості системи, поліпшити розподіл зусиль і ін.
Під час проведення структурного та кінематичного досліджень механізмів усі пасивні умови зв'язку та зайві ступені вільності треба з механізму попередньо вилучити, умовно видаливши відповідні ланки.
3.4. Замінюючі механізми.
Під час аналiзу плоских механізмів з вищими парами в багатьох випадках зручно умовно замінювати вищi пари нищими.
Цри цьому має задовольнятися умова структурної еквівалентності, тобто, щоб замінюючий механізм мав такий самий ступінь вільності і щоб характер миттєвого відносного руху всіх його ланок не змінився.
Порядок побудови замінюючого механізму розглянемо на прикладі механізмів, зображених на рис.3.6. які мають вищу кінематичну пару.
З амінюючі механізми
Рис.3.6.
В точці С контакту двох ланок, які утворюють вищу кінематичну пару /рис.З.6, а/ проведем загальну дотичну t – t до обох профілів ланок. Затим проведемо перпендикуляр до загальної дотичної в т.С, отримаємо нормаль п - п.
На лінії п - п знайдено центри кривизни профілів К1 і К2. В точках К1 і К2 ставимо обертальні кінематичні пари V класу і з’єднуємо їх допоміжними ланками з центрами А і В. Механізм АК1К2В і буде замінюйчим. Якщо центр кривизни однієї із ланок знаходиться в нескінченності /рис.3.6, б/, то в т. С ставиться поступальна кінематична пара V класу.
Побудова замінюючого механізму для зубчастої передачі показана на рис.3.6, в.
Із центрів А і В обертання зубчастих коліс опустимо перпендикуляри на лінію зачеплення п-п, отримаємо точки К1 і К2. В точках К1 і К2 ставимо обертальні кінематичні пари і з'єднаємо їх між собою та з центрами А і В допоміжними ланками. Механізм АК1К2В і буде замінюючим.
Замінюючим механізмом називається такий механізм, у якого вищі кінематичні пари замінені нижчими і який еквівалентний за структурою та кінематикою в даний момент часу, основному механізму.
Лекція 4.
СИНТЕЗ ВАЖІЛЬНИХ МЕХАНІЗМІВ /ОСНОВИ ПРОЕКТУВАННЯ/
План лекції:
4.1. Задачі синтезу механізмів.
4.2. Синтез кривошипно-повзунного механізму.
4.3. Синтез кривошипно-коромислового механізму.
4.4. Синтез кулісного механізму.
4.1. Задачі синтезу механізмів.
Проектування механізмів - це комплексна проблема, яка складається із декількох самостійних етапів. Першим етапом проектування являється розробка кінематичної схеми механізму, яка забезпечувала б необхідний вид і закон руху. Другим етапом проектування являється розробка конструктивних форм механізму, які забезпечували б його міцність, надійність, довговічність та високий коефіцієнт корисної дії і тому подібне. На третьому етапі проектування розробляються технологічні і техніко-економiчні показники механізму.
В ТММ в основному розглядаються методи за допомогою яких вирішується перший етап проектування - розробка кінематичних схем механізму, які відтворювали б необхідний закон руху. В подальшому викладі матеріалу в курсі ТММ під проектуванням механізмів ми будемо розуміти проектування їх кінематичних схем. Розділ теорії механізмів присвячений методам проектування за заданими кінематичними умовами схем механізмів, має назву синтезу механізмів.
Синтез кінематичної схеми механізму полягає у визначенні деяких постійних його параметрів /розмірів ланок, або точніше - відстаней міх осями шарнірів/, які задовольняли б деяким наперед заданим умовам /точки ланок переміщались за необхідними законами/. При цьому частина розмірів задається, а всі інші розміри повинні бути визначенні.
Таким чином, основною задачею синтезу механізму є визначення необхідних розмірів його ланок. В даному розділі ми будемо розглядати тільки синтез плоских важільних механізмів.