

19.3.2. Кінетостатика груп Ассура II виду.
Механізми, утворені із груп Ассура П виду, застосовуються, наприклад, в двигунах внутрішнього згоряння, компресорах і ін.
Накреслимо в
масштабі групу Ассура П виду /рис* 19.3,
а/ Прикладемо до ланок 2 і 3 у відповідних
точках узагальнені сили
і
.
Дію від'єднаних ланок замінимо реакціями
в кінематичних парах. Розкладемо
невідому реакцію в кінематичній парі
А
на нормальну
і
![]() тангенціальну, а в кінематичній парі
В
реакція
тангенціальну, а в кінематичній парі
В
реакція
![]() буде напрямлена перпендикулярно
напрямним і проходитиме через центр
шарніра. Тоді ця група Ассура і кожна
її ланка буде знаходитися в стані
рівноваги. Розглянемо рівновагу другої
ланки. Візьмемо суму моментів всіх сил
відносно т.В:
буде напрямлена перпендикулярно
напрямним і проходитиме через центр
шарніра. Тоді ця група Ассура і кожна
її ланка буде знаходитися в стані
рівноваги. Розглянемо рівновагу другої
ланки. Візьмемо суму моментів всіх сил
відносно т.В:
![]() /19.12/
/19.12/
![]() /19.13/
/19.13/
Складемо векторне рівняння суми всіх сил, що діють на групу:
![]() /19.14/
/19.14/
Побудуємо план
сил в певному масштабі, μF
/рис. 19. 3, б/. Вибираємо довільну точку
РF
- полюс плана сил і з неї відкладемо в
масштабі реакцію
![]() .
Затим, згідно векторного рівняння
/19.14/ будуємо план сил. Проведемо лінії
дії реакцій
і
до їх взаємного перетину. 0тримаємо
повну реакцію
,
а для визначення повної реакції
сполучимо початок вектора
з кінцем вектора
.
.
Затим, згідно векторного рівняння
/19.14/ будуємо план сил. Проведемо лінії
дії реакцій
і
до їх взаємного перетину. 0тримаємо
повну реакцію
,
а для визначення повної реакції
сполучимо початок вектора
з кінцем вектора
.
Кінетостатика групи Ассура П кл., П пор., П виду
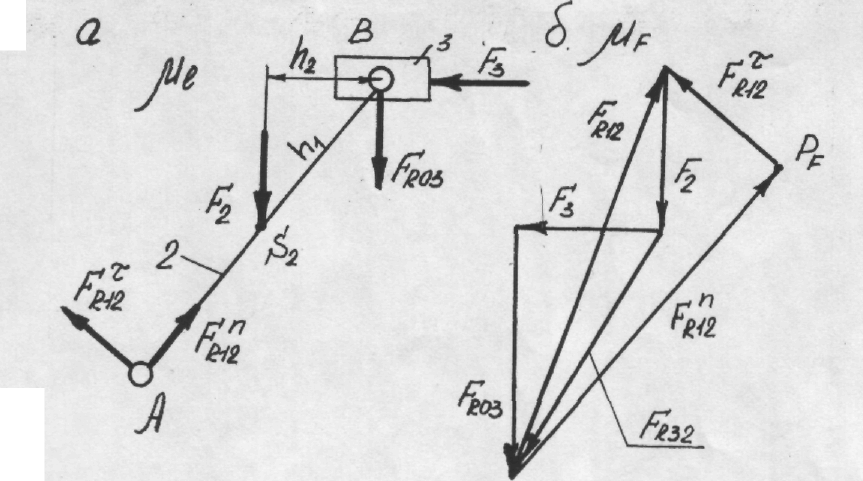
а - група Ассура П виду; б - план сил
Рис. 19. З
Для визначення реакції в середній кінематичній парі складемо векторне рівняння суми всіх сил, що діють на другу ланку:
/19.15/
На
плані
сил
з'єднаємо
кінець
вектора
із
початком
вектора
![]() Отриманий
вектор
і
буде
зображати
в
масштабі
реакцію
Отриманий
вектор
і
буде
зображати
в
масштабі
реакцію
![]()
19.3.3. Кінетостатика груп Ассура III виду.
Механізми, в склад яких входять групи Ассура Ш виду, застосовуються, наприклад, в стругальних верстатах.
Накреслимо в масштабі групу Ассура Ш виду /рис. 19.4, а/. Прикладемо до ланок 2 і 3 у відповідних точках рівнодійні сили і . Дію від'єднаних ланок замінимо реакціями в кінематичних парах.
Розглянемо
спочатку
рівновагу
третьої
ланки,
для
цього
умовно
від'єднаємо
другу
ланку
із
силами,
що
діють
на
неї.
Дію
від'єднаної
ланки 2 на
ланку
3 замінимо
реакцією
![]() яка
буде
напрямлена
перпендикулярно
до
третьої
ланки.
Реакцію
в
кінематичній
парі
О
розкладемо
на
нормальну
і
тангенціальну.
яка
буде
напрямлена
перпендикулярно
до
третьої
ланки.
Реакцію
в
кінематичній
парі
О
розкладемо
на
нормальну
і
тангенціальну.
Візьмемо суму моментів відносно т.А:
![]() /19.16/
/19.16/
![]() /19.17/
/19.17/
Складемо векторне рівняння суми всіх сил, що діють на третю ланку:
![]() /19.18/
/19.18/
Кінетостатика групи Ассура П кл., П пор., Ш виду
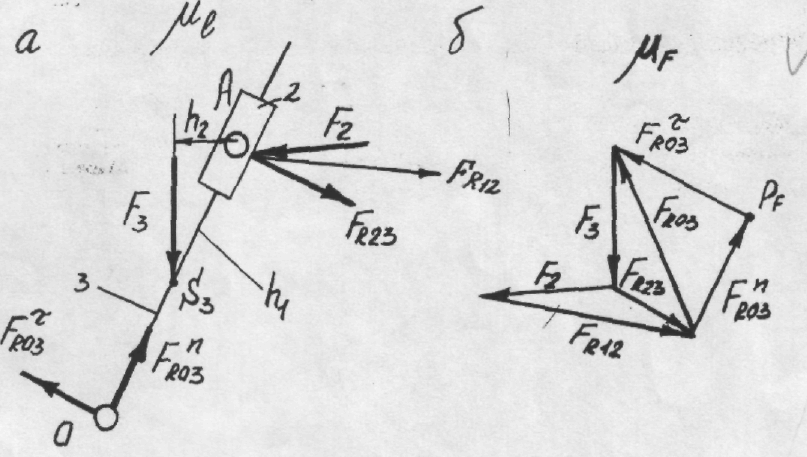
а - група Ассура Ш виду; 6 - план сил
Рис. 19. 4
Побудуємо план
сил в масштабі μf
/рис. 19.4,6/. Із плана сил знайдемо
реакції
![]() і
і
![]() .
.
Затим розглянемо рівновагу групи Ассура в цілому. Складемо векторне рівняння суми всіх сил, що діють на групу:
![]() /19.19/
/19.19/
На
плані
сил
/рис.
19. 4, б/
до
кінця
вектора
сили
прикладемо
вектор сили
.З’єднаємо
кінець
вектора
сили
з
початком
вектора
.
Отримаємо
вектор
Примітка.
Якщо
![]() =
0, то
=
0, то
![]()