

2.4 Принцип утворення механізмів.
Принцип утворення механізмів був вперше сформульований Л.В.Ассуром в 1914 р.
Всякий механізм може бути утворений шляхом послідовного, приєднання до ведучої /вхідної/ ланки із стояком кінематичних ланцюгів з нульовою ступінню вільності.
Механізмом називається, замкнутий кінематичний ланцюг з однією нерухомою ланкою, у якого при заданих законах рухів вхідних ланок, всі інші ланки здійснюють доцільні, наперед заданні рухи /рис.2.4/.
В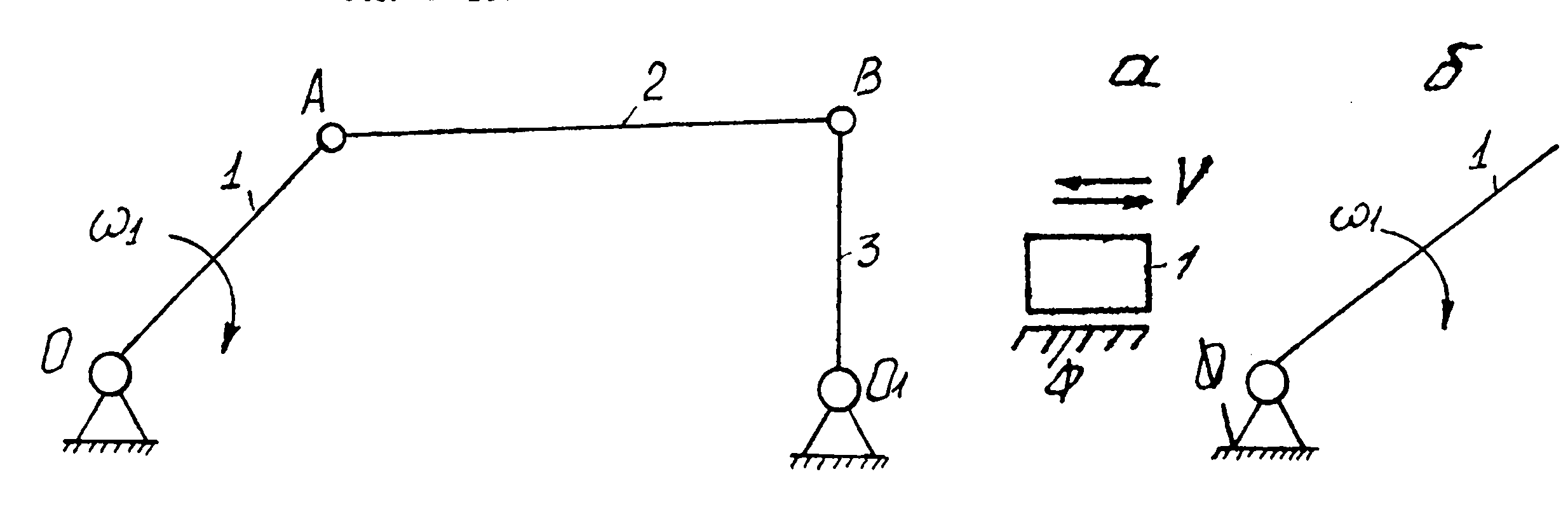 едуча
/вхідна/ ланка із стояком називаеться
механізмом І класу умовно /рис.2.5/.
едуча
/вхідна/ ланка із стояком називаеться
механізмом І класу умовно /рис.2.5/.
Рис.2.4 Рис.2.5
Ступінь вільності механізму характеризує число ступенів вільності механізму відносно ланки, прийнятої за нерухому /стояк/. Більшість механізмів мають одну ступінь вільності, тобто одну вхідну ланку. Деякі механізми мають дві і більше ступенів вільності, наприклад, зубчасті механізми з рухомими в просторі осями мають дві ступені вільності. До таких механізмів відносяться диференціальні механізми, які широко застосовуються, наприклад, у ведучих мостах автомобілів.
В загальному випадку число ступенів вільності механізму дорівнює числу вхідних /ведучих/ ланок.
Лекція 3. Класифікація механізмів План лекції.
3.1. Групи Ассура та їхня класифікація.
3.2. Класифікація механізмів. Послідовність структурного аналізу.
3.3. Зайві ступені вільності та пасивні умови зв'язку.
3.4. Замінюючі механізми.
3.1. Групи Ассура та їхня класифікація.
Кінематичний ланцюг з нульовою ступінню вільності називається групою Ассура.
В сучасному машинобудуванні і автомобілебудуванні широко застосовують плоскі механізми, ланки яких входять в кінематичні пари ІV і V класів. Розглянемо принципи їх структурної класифікації. На основі викладеного принцип утворення механізмів можна сформулювати ще так: всякий механізм може бути утворений шляхом послідовного приєднання до механізму І класу груп Ассура. На основі визначення група Ассура має нульову ступінь вільності W=0. Тоді для кожної групи Ассура і права сторона рівняння /2.4/ рівна нулю
3n - 2p5 - p4 = 0 . /3.1/
Якщо в склад, плоского механізму входять тільки кінематичні пари V класу, то із /2.5/ маємо
p5
=![]() n
.
/3.2/
n
.
/3.2/
Визначимо співвідношення між числом рухомих ланок і кінематичних пар V класу в групах Ассура / рис. 3.1/ згідно / 3.2/, результати запишемо в табл.3.1.
Таблиця 3.1.
-
п
2
4
6
8
...
р5
3
6
9
12
...
Як бачимо із табл.3.1 найпростіша група Ассура складається, із двох рухомих ланок і трьох кінематичних пар V класу.
Групи Ассура діляться на класи і порядки.
Клас групи визначається найвищим класом контура, що входить в дану групу.
Клас контура визначається числом кінематичних пар, що він в себе включає.
Порядок групи визначається числом вільних елементів, якими група приєднується до основного механізму.