

19.4. Кінетостатика механізму і класу.
Накреслимо
в
масштабі
механізм
І
класу
/рис.
19. 5, а/.
Прикладемо в
центрі
мас
S1
силу
тяжіння
![]() та
силу
інерції
та
силу
інерції
![]() .
Дію від'єднаної
ланки
2 замінимо
реакцією
.
Дію від'єднаної
ланки
2 замінимо
реакцією
![]() ,
яка
дорівнює
,
яка
дорівнює
![]() .
До ланки
1
в
т.А
прикладемо
зрівноважувальну
силу
.
До ланки
1
в
т.А
прикладемо
зрівноважувальну
силу
![]() і
визначимо
її.
Візьмемо
суму
моментів
всіх
сил
відносно
т.О:
і
визначимо
її.
Візьмемо
суму
моментів
всіх
сил
відносно
т.О:
![]() /19.20/
/19.20/
![]() /19.21/
/19.21/
Із рівняння /19.21/ знаходимо:
![]() /19.21/
/19.21/
Визначимо
реакцію![]() Складемо
векторне рівняння сил, що діють на
механізм І класу:
Складемо
векторне рівняння сил, що діють на
механізм І класу:
![]() /19.23/
/19.23/
Побудуємо план сил в масштабі μF /рис.19.5,б/, згідно векторного рівняння /19.23/.
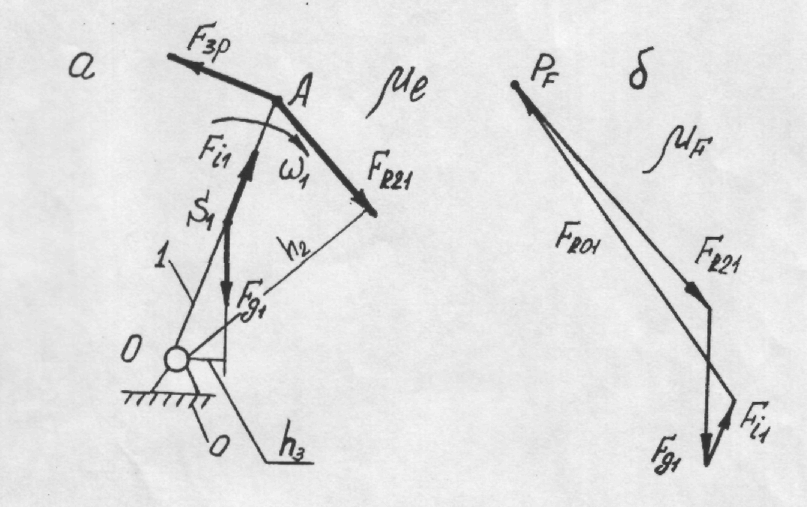
а - механізм І класу; б - план сил
Рис. 19.5
Кінець
вектора
сполучимо
з
початком
вектора
![]() Отриманий
вектор
і
буде
зображати
реакцію
Отриманий
вектор
і
буде
зображати
реакцію
![]() .
.
Таким чином, кінетостатичне дослідження механізмів дозволяє визначити реакції у всіх кінематичних парах та зрівноважувальну силу, або зрівноважувальний момент:
![]() /19.24/
/19.24/
Сили тертя в механізмах можна врахувати наступним чином. Після визначення реакції в кінематичних парах без врахування сил тертя, задаємось величинами коефіцієнтів тертя і визначаємо відповідні сили тертя, а затим вводимо ці сили тертя в число зовнішніх сил, які прикладені до відповідних ланок і повторюємо весь розрахунок спочатку з врахуванням знайдених сил тертя.
Таким чином, зазначений процес можна продовжити й далі, але практично цілком досить обмежитись другим наближенням.
Лекція 20.
Визначення коефіцієнта корисної дії машин
План лекції :
20.1. Коефіцієнт корисної дії машини.
20.2. Визначення коефіцієнту корисної дії при послідовному з'єднанні механізмів.
20.3. Визначення коефіцієнту корисної дії при паралельному з'єднанні механізмів.
20.4. Коефіцієнт корисної дії кінематичних пар.
20.1. Коефіцієнт корисної дії машини.
Щоб визначити ступінь енергетичної досконалості машини, користуються поняттям механічного коефіцієнта корисної дії /ККД/ машини.
Під механічним ККД η розуміють відношення величини роботи АКО сил корисного опору до роботи Ар сил рушійних за цикл усталеного руху:
![]() /20.1/
/20.1/
Враховуючи зв'язок роботи усіх сил опору і роботи рушійних сил із /15.10/, а також значення роботи усіх сил опору із /15. II/, маємо:
![]() /20.2/
/20.2/
де Af - робота сил тертя та інших невиробничих опорів. Тоді рівняння /20.1/ прийме вид:
![]() /20.3/
/20.3/
Відношення значень робіт Af сил невиробничих опорів до роботи сил рушійних, називається коефіцієнтом втрат φ механізмі. Відповідно до цього формула /20.3/ набере вигляду:
![]() /20.4/
/20.4/
З формули /20.3/ випливає, що коли робота рушійних сил дорівнює роботі усіх сил невиробничих опорів AP = Af, то КKД дорівнює нулю. При цьому рух механізму можливий, але без виконання якої-небудь корисної роботи /рух вхолосту/. Таким чином маємо:
![]() /20.5/
/20.5/
Зустрічаються випадки, коли теоретично ККД має від'ємне значення. Це є ознакою самогальмування, або заклинювання механізму, тобто неможливості передавати рух у заданому напрямі /черв'ячна передача/.
Машина складається з кількох механізмів, тому визначення її КKД зводиться до попереднього визначення КKД кожного з механізмів. Залежно від способу з'єднання цих механізмів обчислюють ККД усієї машини.
Існує три способи з'єднання механізмів: 1/ послідовне; 2/ паралельне; 3/ змішане,