

11.4 Геометрія евольвентного зачеплення.
Через точку Р – полюс зачеплення проведемо загальну дотичну Т-Т до початкових кіл і загальну нормаль N-N до профілів зубів, що дотикаються в цій точці /рис. 11.4/. Кут, утворений прямими ТТ і NN, називається кутом зачеплення αw. Геометричне місце точок дотику профілів зубів двох спряжених коліс, називається активною лінією зачеплення, ab.
Зачеплення розпочинається в точці a, в якій коло вершин зубів веденого колеса перетинає лінію зачеплення і закінчується в точці в, в якій лінію зачеплення перетинає коло вершин зубів ведучого колеса.
Активна лінія зачеплення – це розгортка дуги зачеплення cd.
Основним фактором, який визначає довговічність роботи зубчастих коліс є знос поверхонь зубів, величина якого визначається глибиною стертого слою металу. Знос обумовлюється тертям спряжених коліс при взаємному ковзанні поверхонь цих зубів.
Визначимо робочі поверхні профілів зубів. Для цього із т.О1 радіусом О1 а зробимо засічку на профілі ведучого колеса, що проходить через т.Р, а із т.О2 радіусом 02b зробимо засічку на відповідному профілі зуба веденого колеса. Віддалі від кіл вершин зубів до отриманих точок і будуть робочими поверхнями зубів. Виділимо їх штриховими лініями.
Відношення дуги зачеплення cd до кроку Pw, називається коефіцієнтом торцевого перекриття εα /якісна характеристика зачеплення/ .
![]()
/11.34/
К![]() оефіцієнт
торцевого перекриття можна визначити
аналітично за формулою:
оефіцієнт
торцевого перекриття можна визначити
аналітично за формулою:
/11.35/
Для забезпечення безперервної безударної роботи коефіцієнт торцевого перекриття не повинен бути меншим одиниці.
Коефіцієнт торцевого покриття показує число пар зубів, що одночасно знаходяться в зачепленні. Через неточність виготовлення і монтажу зубчастих коліс і внаслідок зносу зубів εαmin=1,05…1,1.
![]() Визначимо
коефіцієнти відносного ковзання робочих
профілів зубів ща формулою: /11.36/
Визначимо
коефіцієнти відносного ковзання робочих
профілів зубів ща формулою: /11.36/
![]()
/11.37/
де U12 – передаточне відношення;
l – довжина теоретичної лінії зачеплення;
x – біжуча координата;
при х = 0, υ1= – ∞, υ 2=1;
при х = l, υ 1=1, υ 2 = – ∞;
при х = N1P, υ 1= 0, υ 2= 0. Графіки υ 1 і υ 2 побудовані на рис. 11.4.
11. 5. Косозубі циліндричні колеса. Основні параметри.
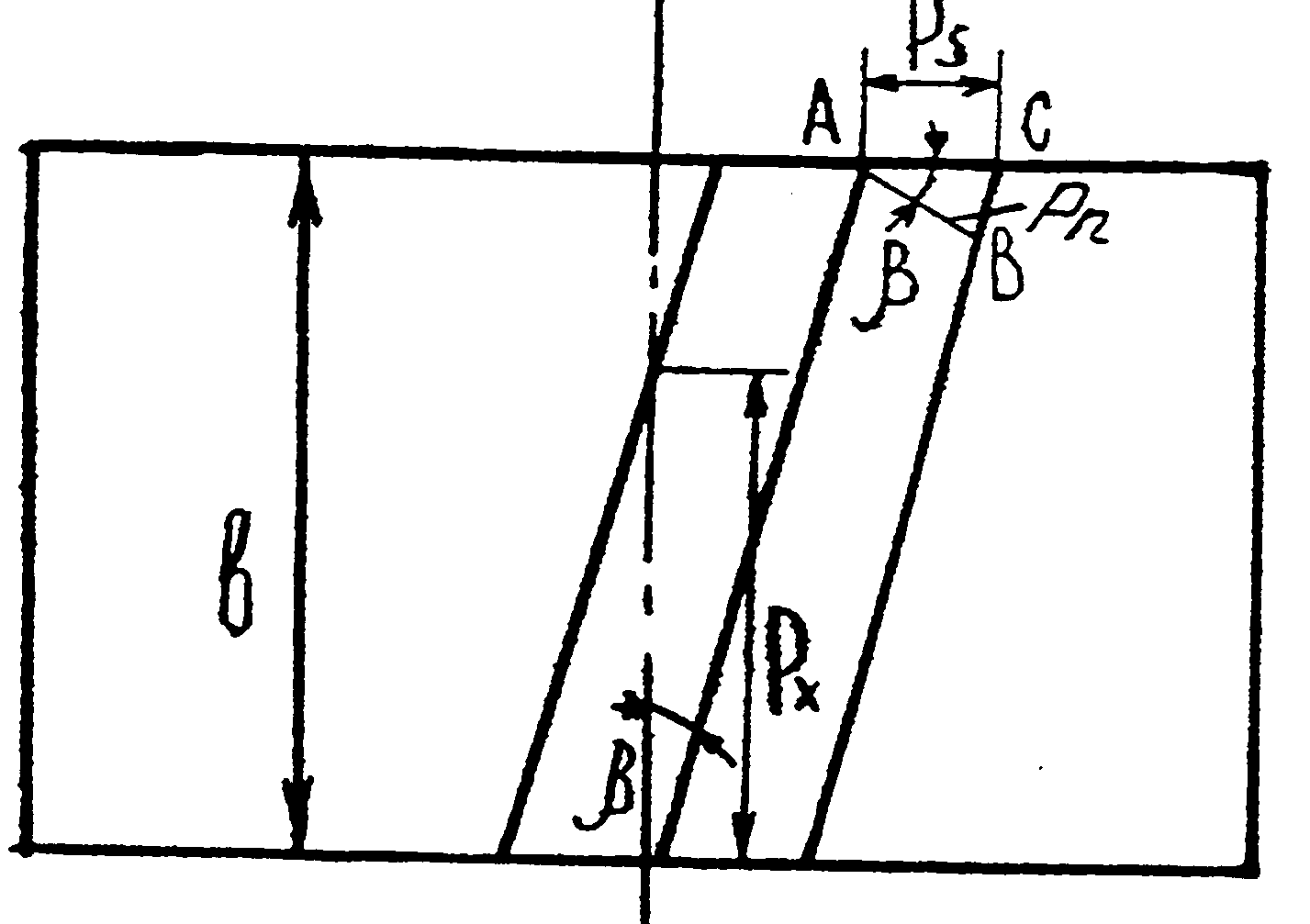
У прямозубих колесах зубці стикаються одночасно по всій довжині зубця, а тому перехід зачеплення з зубця на зубець супроводжується ударом і шумом. Несталість кроку, неточність профілю та інші похибки, які були допущені при виготовленні коліс та при монтажі їх, можуть значно погіршити умови роботи прямозубої передачі. Крім цього, прямозубі колеса мають порівняно невеликий коефіцієнт перекриття. Щоб збільшити коефіцієнт перекриття і зменшити чутливість зубців до похибок виготовлення і монтажу, прямозубі колеса замінюють колесами з косими або шевронними зубцями. У косозубих коліс зубці розміщенні під деяким кутом β до твірної циліндра колеса /рис. 11.5/, /осі обертання/.
В торцевому перерізі профіль зуба евольвент ний. Позначимо в цьому перерізі крок Ps, модуль ms, а в перерізі по нормалі N-N – крок Pn, модуль mn. Кут зачеплення αw, ширина колеса – b.
Зв’язок кроку і модуля аналогічний як і для прямозубого колеса
![]() Pn=πmn,
Ps=πms.
/11.38/
Pn=πmn,
Ps=πms.
/11.38/
Із трикутника АВС /рис.11.5/ маємо: /11.39/
Т![]() орцевий
модуль зв’язаний з нормальним відповідно
орцевий
модуль зв’язаний з нормальним відповідно
/11.40/
Кут нахилу зубців приймають β = 8...30º.
 Косозубе
колесо
Косозубе
колесо
Рис.11.5
Стандартним приймається нормальний модуль. Геометричні параметри косозубого колеса, в нормальному перерізі, визначають за тими же формулами, що і для прямозубого колеса.
![]() В
торцевому перерізі геометричні параметри
визначаються згідно торцевого модуля.
Наприклад, радіус початкового кола
В
торцевому перерізі геометричні параметри
визначаються згідно торцевого модуля.
Наприклад, радіус початкового кола
/11.41/
Коефіцієнт торцевого перекриття косозубого колеса
ε= ε α+ ε β. /11.42/
д![]() е
ε
α
– коефіцієнт
торцевого перекриття, як для прямозубого
колеса;
е
ε
α
– коефіцієнт
торцевого перекриття, як для прямозубого
колеса;
![]() ε
β-
коефіцієнт осьового перекриття;
, тут Px
- осьовий
крок.
ε
β-
коефіцієнт осьового перекриття;
, тут Px
- осьовий
крок.
І![]() з
рис. 11.5
,
тоді
з
рис. 11.5
,
тоді
/11.43/
Перевага косозубого зачеплення:
значно більший коефіцієнт торцевого перекриття /10...20/;
збільшується момент опору зуба за рахунок збільшення його довжини;
зменшується шум за рахунок покращення плавності зачеплення.
Недоліки: виникає осьова сила.
Для зрівноважування осьових сил застосовують спарені косо зубі, або шевронні колеса, в яких зубці мають однаковий нахил в різні сторони.
Лекція 12.
Просторові зубчасті механізми
План лекції:
12.1 Конічні зубчасті передачі. Основні параметри.
12.2. Черв’ячна передача.
12.3. Гвинтові зубчасті колеса.
12.4. Поняття про нові види зубчастого зачеплення.
12.1 Конічні зубчасті передачі. Основні параметри.
Конічні зубчасті передачі застосовуються для передавання рухів між валами, що перетинаються /часто під кутом 90/. Аксоїдами у відносному русі конічних зубчастих коліс /рис. 12.1/ є два конуси А і В. Ці конуси за аналогією з центроїдами /початковими колами циліндричних коліс/ називаються початковими конусами.