

20.4. Коефіцієнт корисної дії кінематичних пар.
Визначимо
ККД
похилої
площини.
Розглянемо
рівномірне
переміщення
повзуна
на
похилій
площині
вгору
/рис.16.2/.
ККД
дорівнює
відношенню
робіт
рушійних
сил
![]() при
відсутності
тертя
до
робіт
рушійних
сил
при
відсутності
тертя
до
робіт
рушійних
сил
![]() на
переміщенні
S:
на
переміщенні
S:
![]() /20.14/
/20.14/
Враховуючи значення FP і FPO із /16.8/ і /16.9/ отримаємо:
![]() /20.15/
/20.15/
При рівномірному переміщенні повзуна на похилій площині донизу рис. /16.3/, враховуючи значення рушійних сил FP і FPO із /16.8/ і /16.9/ будемо мати:
![]() /20.16/
/20.16/
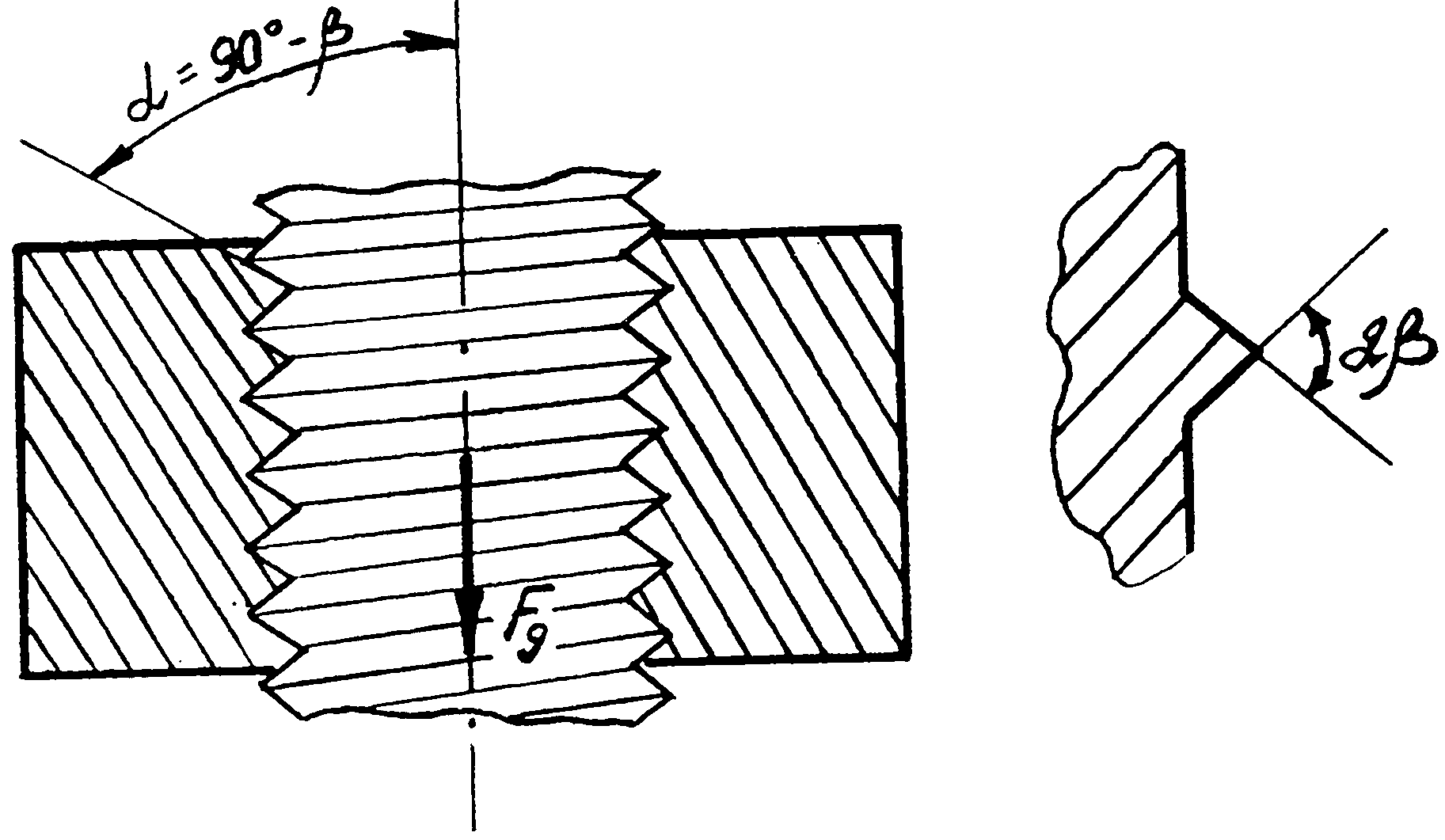
Визначимо ККД гвинтової кінематичної пари /рис.16.6/. Відомо, що для рівномірного піднімання вантажу, на який діє сила тяжіння Fg , за допомогою гвинтової пари треба прикласти пару сил, момент якої визначається за формулою /16.16/. При підніманні вантажу на один крок Р гвинта, гвинт треба повернути на кут 2π /рис.20.4/.
 Розгортка
гвинтової лінії різьби
Розгортка
гвинтової лінії різьби
Рис.20.4
Із рис.20.4 видно, що крок Р гвинта дорівнює:
P = 2πr2tgα, /20.17/
де r2 - середній радіус різьби, α - кут підйому гвинтової лінії різьби.
Отже, корисна робота для підняття вантажу, сила тяжіння якого Fg, на один крок дорівнює:
![]() /20.18/
/20.18/
Затрачена робота для підняття цього ж вантажу буде:
![]() /20.19/
/20.19/
Враховуючи значення Mf із /16.16/, отримаємо:
![]() /20.20/
/20.20/
ККД гвинтової пари:
![]()
або остаточно:
![]() /20.21/
/20.21/
Як бачимо, ККД гвинтової пари з прямокутною різьбою аналогічний ККД похилої площини.
ККД гвинтової пари з трикутною різьбою /рис.20.5/ буде:
![]() /20.22/
/20.22/
де φ1 - приведений кут тертя, визначається із /16.18/,
![]()
Оскільки f<f` i φ<φ`, то ККД має менше значення для трикутної різьби. А тому трикутні різьби використовують як кріпильні, а прямокутні як ходові. Умова самогальмування для трикутної різьби α<φ`.
 Гвинтова
пара
з
трикутною
різьбою
Гвинтова
пара
з
трикутною
різьбою
Рис.20.5
Лекція 21.
Рух механізмів під дією заданих сил
План лекції:
11.1. Основні відомості.
21.2. Зведені сили і моменти.
21.3. Теорема М.Є.Жуковського.
21.4. Зведена маса і зведений динамічний момент інерції механізму.
21.1. Основні відомості.
Вивчаючи рух механізму, ми досі припускали, що вхідна /ведуча/ ланка обертається із сталою кутовою швидкістю /ω1 = соnst/. Для здійснення такого руху потрібне цілком певне співвідношення між силами, що діють на механізм. Взагалі неможливо встановити таке співвідношення між силами, що діють на механізм, яке б забезпечило заданий закон його руху.
У більшості випадків сили корисного опору залежать від положення ланок, до яких вони прикладені. Наприклад, сила опору стиску повітря в циліндрі компресора залежить від його кутової швидкості. У ряді випадків сили корисних опорів залежать від швидкості точок їх прикладання, а іноді від часу. Наприклад, момент опору пропелера залежить від його кутової швидкості, а зусилля перемішування тіста залежить від часу перебування тіста у місильній машині. Сила опору переміщенню транспортного засобу /автомобіля/ залежить не тільки від маси вантажу, але і від швидкості та профілю шляхопроводу.
Визначення закону руху механізму, що перебуває під дією прикладених до його ланок заданих сил, і є задачею динамічного аналізу. Для механізму, що має один ступінь вільності, цю задачу можна вважати розв'язаною, коли буде встановлено закон руху однієї ланки. За таку ланку, звичайно, вибирають ведучий вал робочої машини або ведений вал двигуна. До цієї ланки, що приймається за ланку зведення, доцільно звести всі сили й моменти пар сил, що прикладені до механізму. При цьому необхідно, щоб потужність, яку розвиває замінююча сила, дорівнювала сумі потужностей, що розвивають всі сили, прикладені до ланок механізму. Цю замінюючу силу називатимемо зведеною силою Fзв.
Маси всіх ланок зручно замінити деякою умовною масою, зосередженою в точці зведення. При цьому необхідно, щоб кінетична енергія зведеної маси в даному положенні дорівнювала сумі кінетичних енергій усіх ланок механізму. Тоді замість розглядання всього комплексу сил, що діють на ланки механізму, можна розглянути сили, що діють лише на одну ланку - ланку зведення, наприклад кривошип О1А /рис.21.1/, що перебуватиме під дією зведеної сили Fзв або зведеного моменту Mзв /у загальному випадку змінних/ і матиме зведену масу тзв / у загальному випадку також змінну/, зосереджену ніби в точці А зведення.
Якщо ланка зведення робить обертальний рух, то всі діючі сили і моменти доцільно замінити однією зведеною парою сил з моментом Мзв а всі маси і динамічні моменти інерції ланок замінити зведеним динамічним моментом інерції Ізв , наданим ланці зведення О1А.
 Вхідна
ланка
/ланка
зведення/
Вхідна
ланка
/ланка
зведення/
Рис.21.1.
Отже, у цьому випадку задача полягає у визначенні закону руху однієї ланки, що перебуває під дією зведеного моменту і має зведений динамічний момент інерції Ізв . Закон руху всіх інших ланок механізму можна визначити методом планів швидкостей та прискорень, або методом кінематичних діаграм.