

18.3. Зведення сил інерції ланки до центру коливання.
Силу інерції Fi і момент пари сил Мі можна замінити однією результуючою силою Fi ,прикладеною в деякій точці К /рис.18.1/
Визначення центру коливання
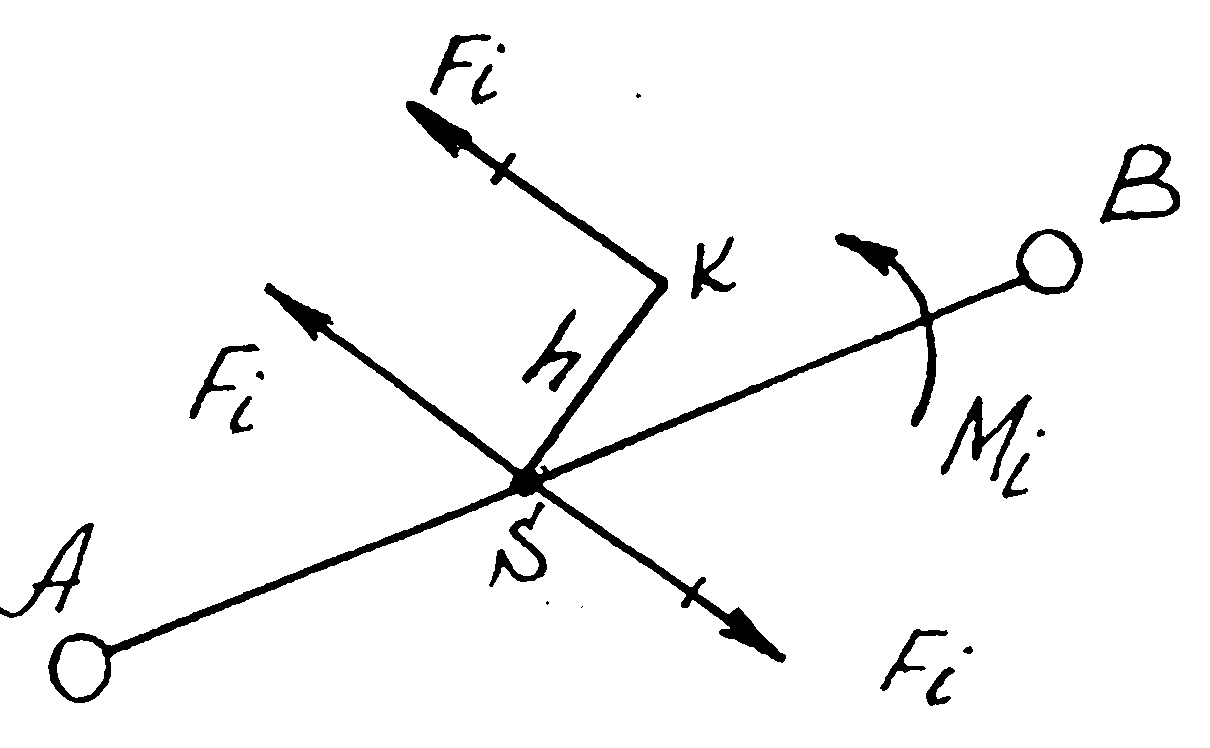
Рис.18.1
Для цього момент Мі пари сил інерції замінемо парою сил, кожна складова Fi якої рівна за величиною силі інерції Fi . Знайдемо величину цих складових
![]() /18.4/
/18.4/
Прикладемо цю пару до ланки так, щоб одна складова - Fi була приложена в центрі мас S, а друга – в деякій точці К, на відстані h від центру мас.
Визначимо плече h із /18.4/
![]() /18.5/
/18.5/
Отримаємо дійсне значення плеча h в м.
Складова - Fi пари сил від моменту Мі , яка прикладена в центрі мас, зрівноважує силу інерції Fi , прикладену також в центрі мас. В результаті чого залишається одна сила Fi , прикладена в точці К. Точка К називається центром коливання ланки.
18.4. Метод заміщених точок.
При розв'язуванні деяких технічних задач буває зручно замінити результуючу силу від сили інерції і моменту пари сил інерції, силами інерції мас, які зосереджені у деяких вибраних точках. Ці точки називають заміщеними точками. В якості заміщених точок можуть бути вибрані, наприклад, центри кінематичних пар /шарнірів/, центри мас ланок і ін.
Умовою такої заміни з вимога, щоб сили інерції ланки і системи точкових мас, що її заміщає, були у динамічному відношенні еквівалентними. Для цього повинні бути виконані наступні умови:
1) сума мас, які зосереджені в заміщених точках, повинна бути рівна масі ланки;
2)сума статичних моментів заміщених мас, відносно центра інерції мас ланки, дорівнює нулю;
З) динамічний момент інерції мас, які зосереджені в заміщених точках, відносно осі, яка проходить через центр інерції мас ланки перпендикулярно до площини, в якій ланка рухається, повинен бути рівний динамічному моменту інерції ланки відносно тієї ж осі.
При виконанні перших двох умов отримуємо статичне розміщення маси ланки, а при виконанні всіх трьох умов - динамічне розміщення маси ланки.
При наближених розрахунках буває достатньо обмежитися статичним розміщенням маси ланки.
Якщо центр мас ланки розташований між центрами шарнірів, то масу ланки замінюють двома або трьома точковими масами.
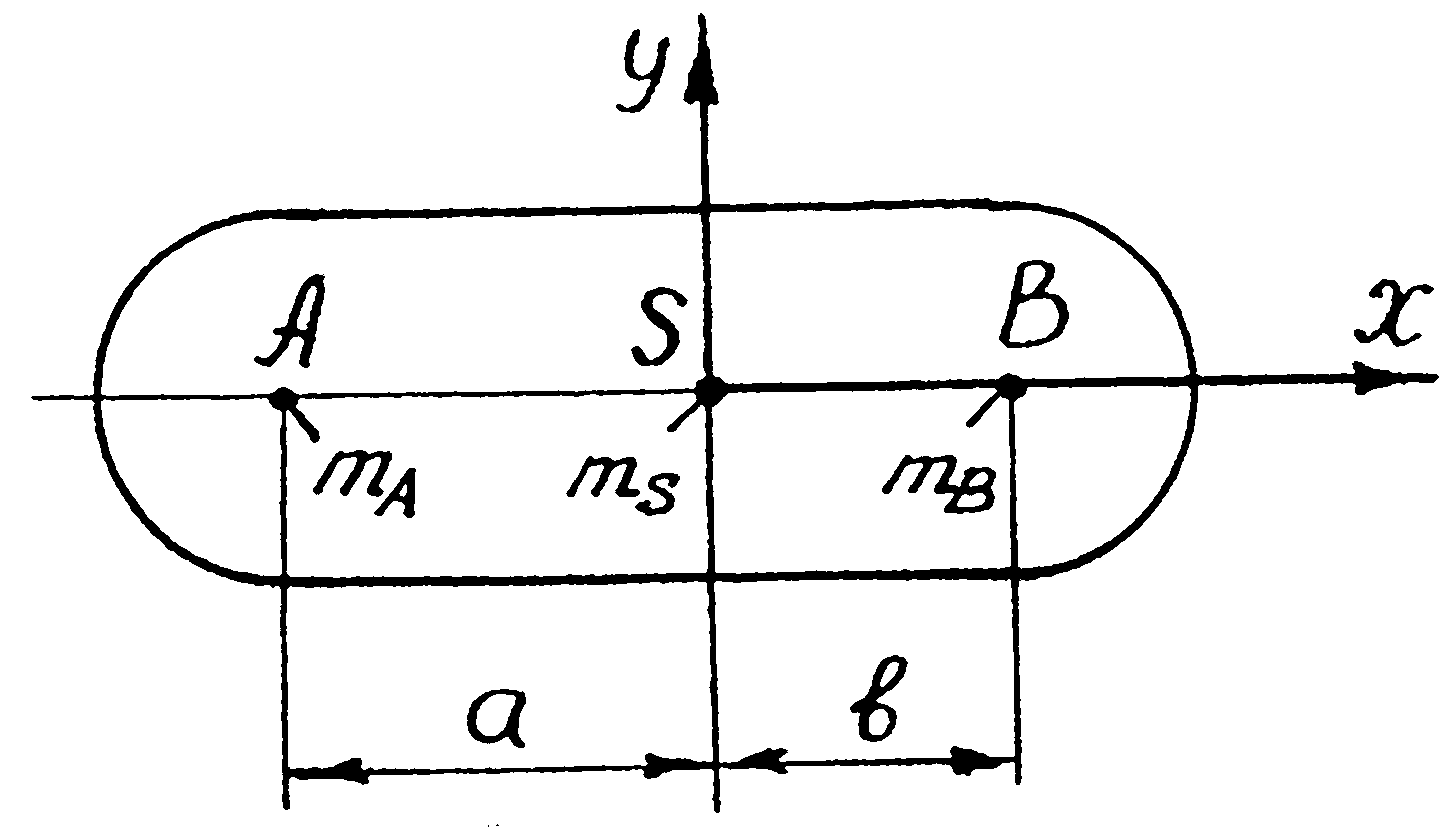
Нехай треба розмістити масу т ланки в двох точках, розташованих на одній прямій з центром мас ланки /рис.18.2/.
 Розміщення
маси
ланки
в
точках
Розміщення
маси
ланки
в
точках
Рис.18.2
Умови динамічної еквівалентності ланки з масами, що розміщені в точках А і В, ланці масою т з центром мас в точці Ѕ запишемо у вигляді наступних рівнянь:
![]()
![]() /18.6/
/18.6/
![]()
Задамося, наприклад, положенням точки А і розв'язуючи сумісно рівняння /18.6/, знаходимо:
![]()
![]() /18.7/
/18.7/
![]()
При статичному розташуванні маси ланки по двох точках можна довільно задаватися двома величинами, наприклад, відстанями а і b розміщуючи маси ma і mb в центрах шарнірів А і В. Для цього випадку достатньо записати два рівняння:
![]()
![]() /18.8/
/18.8/
Із рівнянь /18.8/ знайдемо величини мас:
![]()
![]() /18.9/
/18.9/
Застосуємо метод заміщених точок для визначення сил інерції кривошипно-повзунного механізму /рис.І8.3,а/.
Ведуча ланка ОА обертається із сталою кутовою швидкістю ω. Центри мас ланок 1,2,3 позначені відповідно S1, S2, S3. Як заміщені точки для ланки 1 вибираємо точки 0 і А1, а для ланки 2 вибираємо точки А2 і В2.
Із формул /18.9/ для ланки 1 маємо:
![]()
![]() /18.10/
/18.10/
До визначення сил інерції
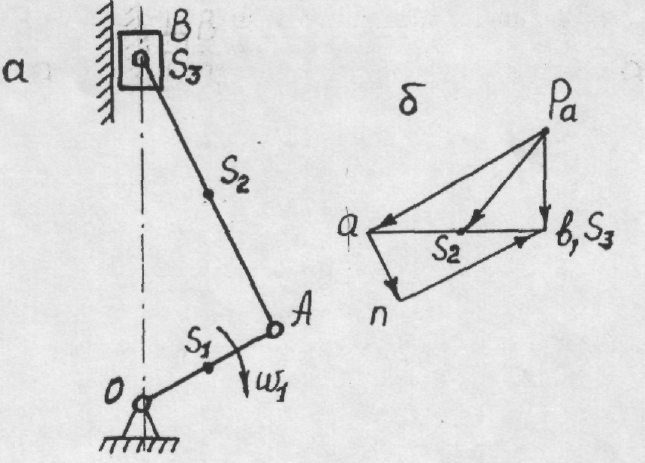
а - кривошипно-повзунний механізм; б - план прискорень
Рис.18.З
де т1 - маса ланки 1, то1 і тА1 - розміщені маси ланки 1 відповідно в точки О1 і А1
Масу т2 шатуна АВ розміщуємо аналогічно:
![]()
![]() /18.11/
/18.11/
Прискорення точки О дорівнює нулю, тому зосереджена в ній маса в дальнійших розрахунках не враховується.
Визначимо прискорення необхідних точок ланок механізму. Для цього побудуємо план прискорень /рис.18.З,б/.
Сили інерції розміщених мас прикладені у відповідних точках і спрямовані протилежно прискоренням цих точок. В механізмі, що розглядається величина сили інерції FіА маси тА, одержаної від розташування мас ланок 1 і 2:
![]() /18.12/
/18.12/
де тА1 і тА2- маса, зосереджена в точці А і одержана в результаті розташування відповідно мас т1 і т2 . Сила інерції FіА напрямлена у бік, зворотний прискоренню аА точки А.
Аналогічно величина сили інерції Fів маси тВ , яку вирахували від розташування маси шатуна 2, дорівнює:
![]() /18.13/
/18.13/
де т3 маса ланки 3; тВ2 - маса, зосереджена в точці В і одержана в результаті розташування маси т2 в точки А2 і В2.
Лекція 19.
Кінетостатичне дослідження механізмів
План лекції:
19.1. Основні завдання кінетостатичного розрахунку*
19.2. Умова статичної визначеності кінематичного ланцюга.
19.3. Кінетостатика груп Ассура П класу II порядку.
19.3.1. Кінетостатика груп Ассура І виду.
19.3.2. Кінетостатика груп Ассура П виду.
19.3.3. Кінетостатика груп Ассура Ш виду.
19.4. Кінетостатика механізму І класу.
19.1. Основні завдання кінетостатичного розрахунку.
Силовий розрахунок механізмів являється однією із важливих стадій проектування машин. До основних завдань кінетостатичного розрахунку механізмів належать:
а) визначення зусиль, що діють на окремі ланки механізмів;
б) визначення реакції в кінематичних парах;
в) визначення зрівноважувальної сили, або зрівноважувального моменту.
Ці зусилля будуть використовуватися при розрахунках ланок і кінематичних пар на міцність, стійкість, жорсткість і при деяких інших динамічних розрахунках.
Розрахунок механізмів, який виконується з врахуванням тільки зовнішніх сил, що діють на ланки, називається статичним. Однак, нерівномірний рух ланок викликає додаткові зусилля в опорах. Для визначення повних реакцій в опорах, з врахуванням додаткових зусиль, будемо застосовувати метод Даламбера, тобто в рівняння статики введемо, так звані, сили інерції і моменти пар сил інерції.
Силовий розрахунок, який виконується з врахуванням сил інерції і моментів пар сил інерції, називається кінетостатичним.
Силовий розрахунок в першому наближенні виконується без врахування сил тертя. Як відомо із попередньої лекції, сили інерції і їх моменти фіктивні і на ланки не діють. Сили інерції вводять в розрахунки чисто умовно, тільки для того, щоб ланки були в рівновазі і до них можна було застосовувати рівняння статики.