

22.2. Нерівномірність руху механізмів.
Рівномірність руху частин механізму є істотно важливою умовою найвигіднішого його використання. Розрізняють два типи коливання швидкостей механізму: періодичне і неперіодичне, що зумовлено головним чином зміною навантаження механізму.
У ротаційних двигунах /електродвигуни/ робочий процес відбувається не циклічно, а безперервно і при усталеному русі характеризується сталістю рушійного моменту; отже, у цих двигунах періодичних коливань швидкості не буде і головна ланка при усталеному русі обертатиметься рівномірно.
У поршневих двигунах, в основі яких лежить кривошипно-повзунний механізм, орган, що сприймає роботу рушійних сил /поршень/, робить зворотно-поступальні рухи. Це ускладнює регулювання кутової швидкості обертання головного вала двигуна. В таких двигунах рушійна сила і сила корисного опору являються змінними величинами, незалежними одна від одної. Усталений рух механізму супроводжується періодичними змінами швидкості обертання головного вала. Така нерівномірність називається періодичною. Великі періодичні коливання швидкості недопустимі, бо вони спричиняють у кінематичних парах додаткові динамічні зусилля, які знижують надійність роботи механізму та його загальний коефіцієнт корисної дії. Задача про сталість швидкості обертання полягає в тому, щоб неминучі періодичні коливання швидкості усталеного руху довести до деяких, наперед заданих значень. Отже, питання зводиться до задачі регулювання коливань швидкості обертання головного вала при усталеному русі. Це регулювання здійснюється за допомогою додаткової маси - маховика /колеса з великим динамічним моментом інерції/, який встановлюють на одному з валів механізму.
Дія маховика полягає в тому, що при перевищенні роботи рушійних сил над роботою сил опору, маховик сприймає на себе надлишок кінетичної енергії механізму, завдяки своєму великому моменту інерції не дає швидкості надмірно зростати; коли ж робота сил опору перевищує роботу рушійних сил, маховик віддає нагромаджену кінетичну енергію, протидіючи зменшенню швидкості.
Крім періодичних коливань, у механізмі можливі коливання швидкості, що не мають певного циклу, так звані неперіодичні коливання. Ці коливання можуть виникати при раптовій зміні навантаження, включення в механізм додаткових мас тощо. Неперіодичні коливання регулюють за допомогою спеціальних механізмів, які називаються регуляторами.
22.3. Середня швидкість руху. Коефіцієнт нерівномірності руху.
При проектуванні та розрахунку механізмів середнє значення кутової швидкості вхідної ланки /головного валу/ за один цикл усталеного руху завжди задається на основі загальних міркувань про роботу механізму в зв'язку з його робочим процесом.
Розглянемо усталений рух, при якому через деякі проміжки часу параметр руху буде повторюватися /рис.22.2/.
Зміна кутової швидкості вхідної ланки
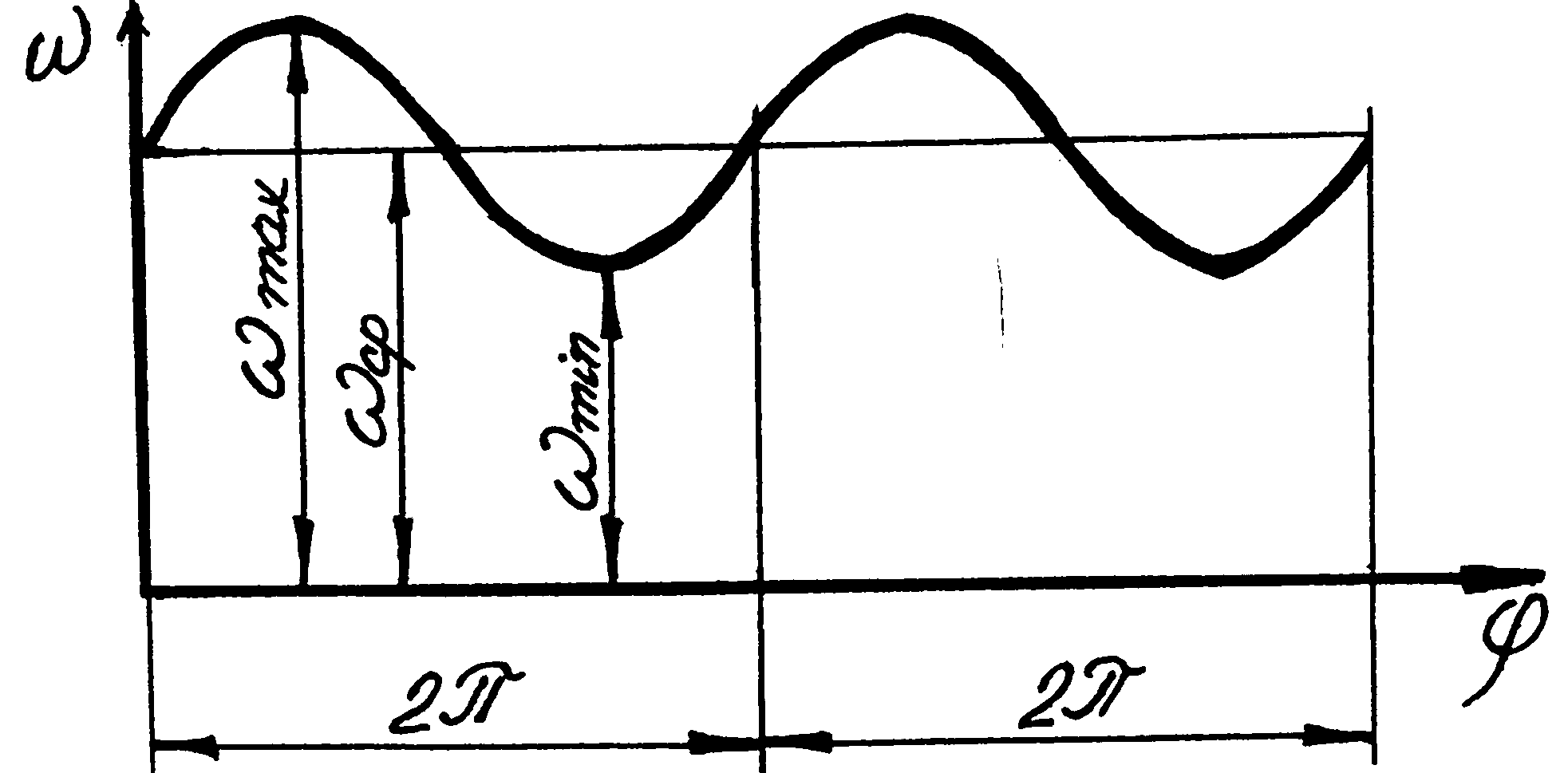
Рис.22.2.
Цей проміжок часу назвемо циклом періодичного руху. При визначенні середньої кутової швидкості ωСР користуються наближеною формулою:
![]() /22.11/
/22.11/
де
![]() і
і
![]() -
відповідно
максимальна
і
мінімальна
кутові
швидкості
вхідної
ланки.
-
відповідно
максимальна
і
мінімальна
кутові
швидкості
вхідної
ланки.
Середня швидкість ωСР береться рівною номінальній кутовій швидкості, тобто кутовій швидкості, яка проставляється у паспорті двигуна механізму, або машини. При регулюванні руху механізмів треба наперед знати, в яких межах допускається робочим процесом механізму зміна кутової швидкості ωСР вхідної /головної/ ланки. Ці межі установлюються з досвіду. Нерівномірність руху механізму характеризується відношенням абсолютної нерівномірності руху механізму до його середньої швидкості;
![]() /22.12/
/22.12/
Величина
![]() називається
коефіцієнтом
нерівномірності
руху
механізму.
Найсуворіші
вимоги
щодо
рівномірності
руху
повинні
задовольняти
двигуни,
які
надають
рух
електричним
генераторам
змінного
струму.
Для них
називається
коефіцієнтом
нерівномірності
руху
механізму.
Найсуворіші
вимоги
щодо
рівномірності
руху
повинні
задовольняти
двигуни,
які
надають
рух
електричним
генераторам
змінного
струму.
Для них
![]() для
металообробних
верстатів
для
металообробних
верстатів
![]() для
двигунів
внутрішнього
згоряння
для
двигунів
внутрішнього
згоряння
![]()
Розв'язуючи сумісно рівняння /22.11/ і /22.12/ дістанемо:
![]() /22.
13/
/22.
13/
![]() .
/22.14/
.
/22.14/
Лекція 23.
Визначення динамічного моменту інерції маховика
План лекції :
23.1. Графіки моментів, робіт та приросту кінетичної енергії механізму.
23.2. Графік зведеного динамічного моменту інерції механізму.
23.3. Діаграма енергомас.
23.4. Динамічний момент інерції та геометричні розміри маховика.
23.1. Графіки моментів, робіт та приросту кінетичної енергії механізму.
Розглянемо питання про залежність між кінетичною енергією, зведе ним динамічним моментом інерції і коефіцієнтом нерівномірності руху вхідної ланки /головного валу/ машини. Застосуємо метод енергомас /метод Віттенбауера/ для визначення потрібного динамічного моменту інерції маховика.
Побудуємо графік зведених моментів сил опору за цикл усталеного руху Мзв = Мзв(φ) /рис . 23.1,а/
![]() /23.1/
/23.1/
де
- Мзв
і
![]() зведений і
зрівноважувальних
моменти
сил
опору;
зр-зрівноважувальна
сила,
визначена
відомими
методами,
наприклад,
важілем
Жуковського;
зведений і
зрівноважувальних
моменти
сил
опору;
зр-зрівноважувальна
сила,
визначена
відомими
методами,
наприклад,
важілем
Жуковського;
![]() - довжина
вхідної
ланки
/ланки
зведення/.
Визначимо
масштаби
графіка
моментів:
- довжина
вхідної
ланки
/ланки
зведення/.
Визначимо
масштаби
графіка
моментів:
![]()
![]()
де Мі - значення моменту в і-му положенні механізму; уі - відрізок в мм на рис. 23.1, а, що зображає момент Мі в даному положенні; L - відрізок в мм, що зображає кут 2π повороту вхідної ланки.
Побудуємо графік робіт сил опору Aon = Aon(φ) /рис.23.1,б) для цього графічно інтегруємо графік зведених моментів сил опору Мзв = Мзв(φ)
Масштаб графіка робіт буде:
μA = μM * μφ * H, /23.3/
де Н - довільно вибрана полюсна відстань.
Побудуємо графік робіт рушійних сил AP = AP(φ) /рис.23.1,б/. Знаючи, що при усталеному русі робота сил опору дорівнює роботі рушійних сил, з'єднаємо початок і кінець графіка роботи сил опору прямою лінією:
Aon = AP /23.4/
Це і буде графік робіт рушійних сил.
Побудуємо графік моментів рушійних сил MP = MP(φ) /рис.23. 1, а/, для цього графічно диференціюємо графік робіт рушійних сил AP = AP(φ)
Побудуємо
графік
приросту
кінетичної
енергії
механізму
![]() /рис.23.1,в/,
використавши,
при
цьому,
відношення:
/рис.23.1,в/,
використавши,
при
цьому,
відношення:
![]() /23.5/
/23.5/
Масштаб графіка приросту кінетичної енергії буде:
![]() /23.6/
/23.6/
де т – коефіцієнт проропорційності.