

13.4. Визначення передаточних відношень планетарних механізмів графічним методом.
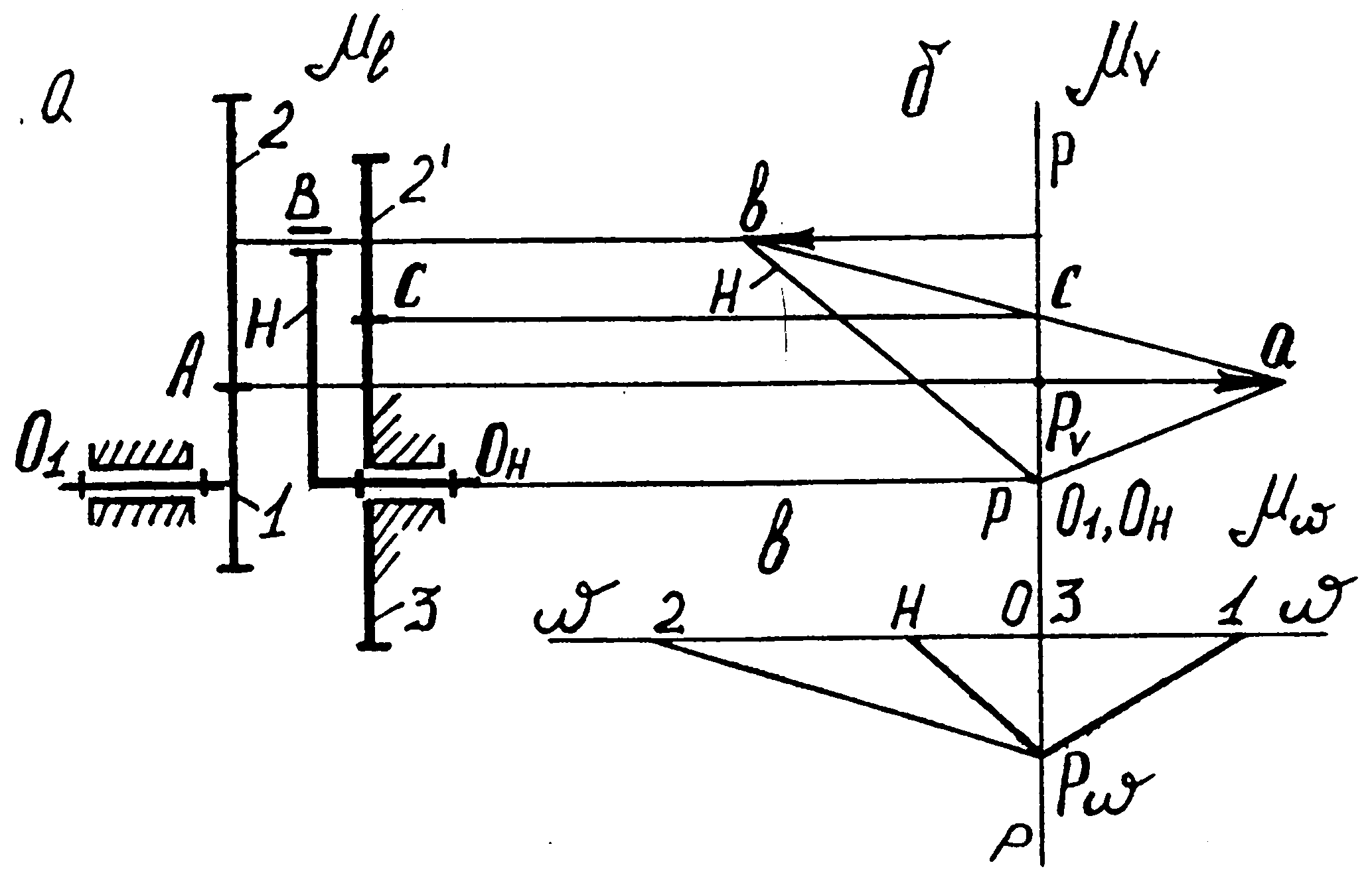
Графо – аналітичний метод кінематичного дослідження планетарних механізмів зводиться до побудови трикутників лінійних швидкостей кожного колеса, знаходження кутових швидкостей всіх ланок і передаточних відношень між ними / метод Л.П. Смирнова/.
Побудуємо кінематичну схему механізму в масштабі l /рис. 13.4, а/.
На деякій відстані від схеми проведемо полюсну лінію РР /рис. 13.4, б/
З плану механізму на лінією РР проектуємо точки, швидкості яких рівні нулю: 01, 0Н, С. Далі будуємо трикутники швидкостей для ланок механізму. Побудову починаємо з любої ланки, в якої швидкість однієї з точок рівна нулю, наприклад з зубчастого колеса I.
 Графічне
визначення передаточних відношень
Графічне
визначення передаточних відношень
а – кінематична схема механізму; б – план лінійних швидкостей; в- план кутових швидкостей.
Рис. 13.4
Визначимо швидкість т.А, що належить зубчастому колесу 1. Кутова швидкість ω1 відома:
VA = ω1ro1A .
Відкладемо відрізок, що зображає швидкість VA в масштабі v, отримаємо точку а. З'єднаємо т.а з точками 01 і С. Продовжимо лінію ас до перетину з віссю сателітів 2-2, отримаємо точку b. З’єднаємо точку b з віссю 0Н. Лінії 01 а, ав і 0нв пропорційні кутовим швидкостям відповідно ланок 1,2 і Н.
Побудуємо план аналогів кутових швидкостей /рис. 13.4, в/.
Проведемо лінію ω-ω вибираємо точку Р ω і проведемо з неї похилі лінії, паралельно лініям плану швидкостей 01 а, ав і 0Нв.На лінії ω-ω знайдемо точки перетину з цими похилими лініями. Позначимо ці точки відповідно 1, 2 і Н. Із плану кутових швидкостей можна визначити передаточні відношення між ланками механізму.
Передаточне відношення від ланки 1 до водила Н:
![]() .
/13.12/
.
/13.12/
де 01 і 0Н – відрізки із плану кутових швидкостей. Знак «-» - тому, що відрізки 01 і 0Н лежать по різні сторони від лінії Рω0, а зубчасте колесо 1 і водило Н мають напрям обертання в протилежні сторони.
Аналогічно можна визначити:
![]() ;
;
![]() . /13.13/
. /13.13/
13. 5 Поняття про хвильову передачу. Кінематика.
В 1959 році Массер в США отримав патент на зубчасту хвильову передачу, яка може застосовуватися в якості редуктора з великим передаточним відношенням. Хвильова зубчаста передача відрізняється від інших зубчастих механізмів тим, що гнучке колесо зазнає хвильової деформації, завдяки якій і передається обертальний рух. Хвильова передача може бути виконана планетарною і диференціальною.
Хвильова зубчаста передача в планетарному одноступінчастому виконанні /рис. 13.5/ складається з генератора хвиль деформації /водила/ 1, з'єднаного з ведучим валом, жорсткого центрального колеса 2 та пружної ланки 3, виконаної у вигляді тонкостінного стакана з зубчастим вінцем на вільному кінці і з'єднаної з веденим валом передачі. Зубчастий вінець пружної ланки 3, деформований роликами генератора 1 в еліпс, входить у зачеплення з центральним колесом 2 у двох діаметрально протилежних зонах /у зонах найбільшої деформації/.
Хвильова передача
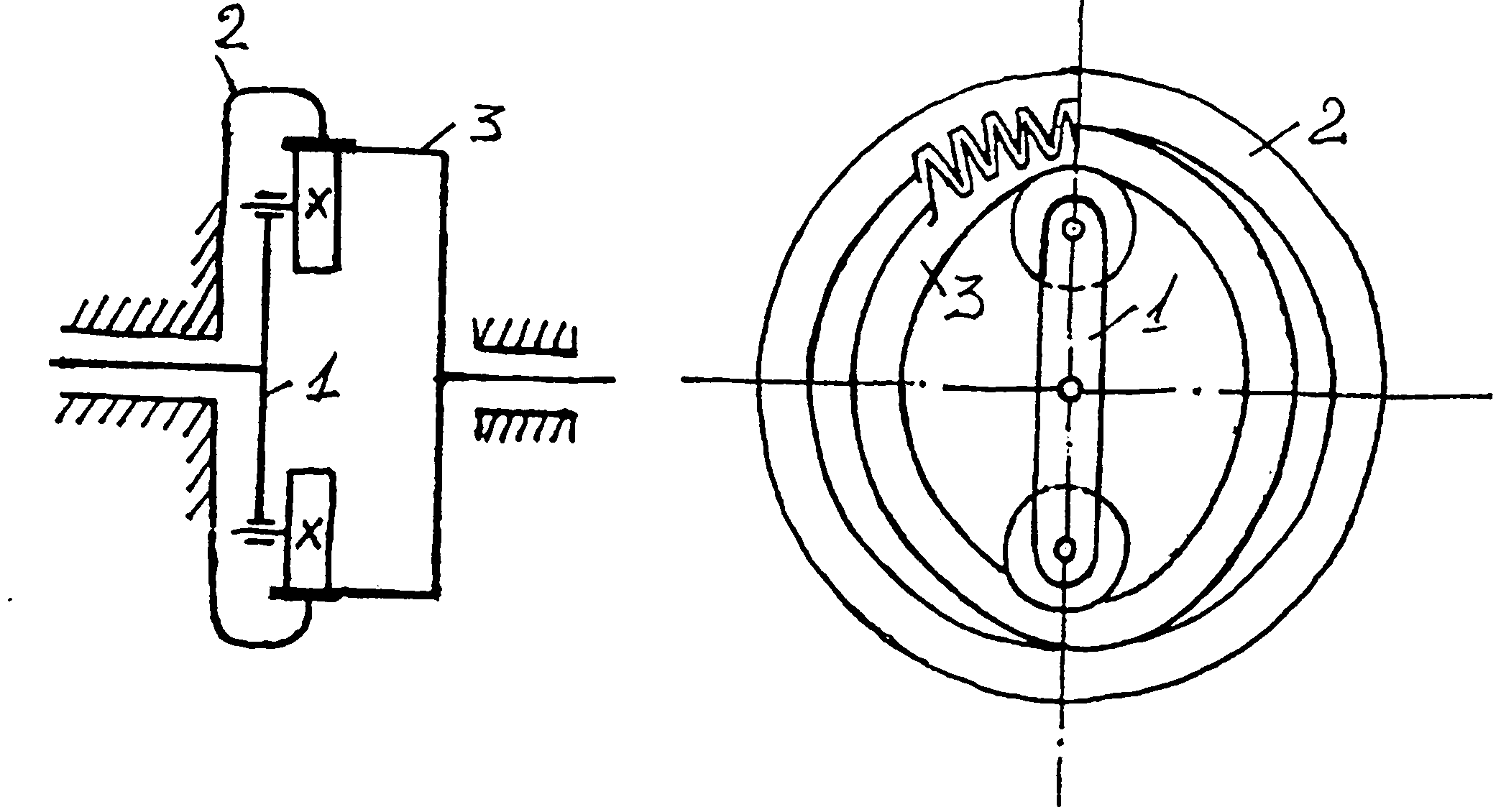
Рис. 13.5
Під час обертання генератор 1 своїми роликами обкочує пружно деформований зубчастий вінець 3 по нерухомому центральному колесі 2 переміщуючи у коловому напрямі у бік власного обертання осей зачеплення, або хвилі деформації. При різних числах зубців 2 та гнучкого вінця 3 це приводить до обертання вінця, а отже і з'єднаного з ним веденого вала у напрямі, протилежному напряму обертання генератора 1. Різниця між зубцями кратна числу хвиль генератора. Визначимо ступінь вільності таких передач:
|
n |
P5 |
P4 |
1
|
1-2
|
2-3
|
|
3
|
3-0
|
-
|
|
|
2
|
2
|
1
|
|
n |
P5 |
P4 |
1
|
1-2
|
2-
|
|
2
|
2-0
|
|
|
3
|
3-О
|
|
|
|
3
|
3
|
1
|
W=3*2-2*2-1=1 W=3*3-2*3-1=2
Визначимо передаточне відношення хвильової передачі в планетарному одноступінчатому виконанні /рис. 13.5/.
Залежність між кутовими швидкостями ω1 генератора I і /ведучої ланки/ та ω 3 пружного вінця /веденої ланки / можна дістати, користуючись методом обертання руху. Для цього всьому механізму надамо кутову швидкість – ω 1: при цьому в оберненій передачі генератор буде немов би зупинений, а гнучкий вінець і жорстке колесо обертатимуться в одному напрямі відповідно з кутовими швидкостями:
1 |
ω 1 |
ω 1- ω 1=0 |
2 |
ω 2=0 |
ω 2- ω 1=- ω 1 |
3 |
ω 3 |
ω 3- ω 1 |
Передаточне відношення від колеса 2 до гнучкої ланки 3 в оберненому русі визначиться відношенням
![]() /13.14/
/13.14/
З відношенням /13.14/ маємо:
![]() .
/13.15/
.
/13.15/
Враховуючи, що
передаточне відношення U(1)32
в зображеній передачі визначається як
і звичайної передачі відношенням чисел
зубів, тобто
![]() і
z2>z3,
то рівняння
/13.15/ остаточно прийме вид
і
z2>z3,
то рівняння
/13.15/ остаточно прийме вид
![]() .
/13.16/
.
/13.16/
Лекція 14.
Синтез планетарних передач. Виготовлення зубчастих коліс.
План лекції:
Проектування планетарних механізмів.
Методи нарізання зубів зубчастих коліс.
Підрізування зубів. Найменше число зубів на колесі.
Виправлення /коригування/ зубчастих коліс.
14. 1 Проектування планетарних механізмів.
Планетарні механізми виконують звичайно з декількома сателітами, розміщеними на рівних відстанях один від одного. При числі сателітів, рівному , вони повинні бути встановлені один відносно одного під кутами 2 /
При збільшенні числа сателітів навантаження на кожну пару зубів зменшується; це дозволяє застосовувати колеса менших розмірів, а тому і загальні габарити механізму зменшуються. Однак існує межа числа сателітів. Максимальне число сателітів може бути таким, щоб вершинами своїх зубів сателіти не торкалися один одного. Для того, щоб планетарний механізм можна було скласти, необхідно щоб зуби сателітів могли одночасно ввійти в зачеплення з зубами обох центральних коліс. Виконання цих і інших умов повинно бути враховано при проектуванні планетарних механізмів, яке зводиться до визначення числа зубів коліс, при заданому передаточному відношенні і підбору числа сателітів.
При проектуванні планетарного механізму необхідно виконати наступні умови: забезпечення заданого передаточного відношення, умову співвісності, умову складання, умову сусідства.
Розглянемо всі ці умови на прикладі редуктора Джемса /рис. 14.1/.
Забезпечення заданого передаточного відношення
Визначимо необхідне співвідношення між числом зубів коліс редуктора Джемса для забезпечення заданого передаточного відношення, використавши формулу передаточного відношення планетарної передачі /13.10/, отримаємо:
![]() .
/14.1/
.
/14.1/
Умова співвісності.
Для виконання умови співвістиності необхідно щоб осі центральних
/сонячних/ коліс 1 і 3 і водила Н лежали на одній прямій /осі/ 00.
Із рис. 14.1 видно, що для виконання цієї умови необхідно забезпечити наступне співвідношення між радіусами коліс:
r3=r1+2r2 . /14.2/
Виразимо радіуси через модуль і числа зубів
![]() .
/14.3/
.
/14.3/
Скоротивши це рівняння на m/2, отримаємо:
z3 = z1 + 2 z2 . /14.4/
Звідки
![]() .
/14.5/
.
/14.5/
Редуктор Джемса
Р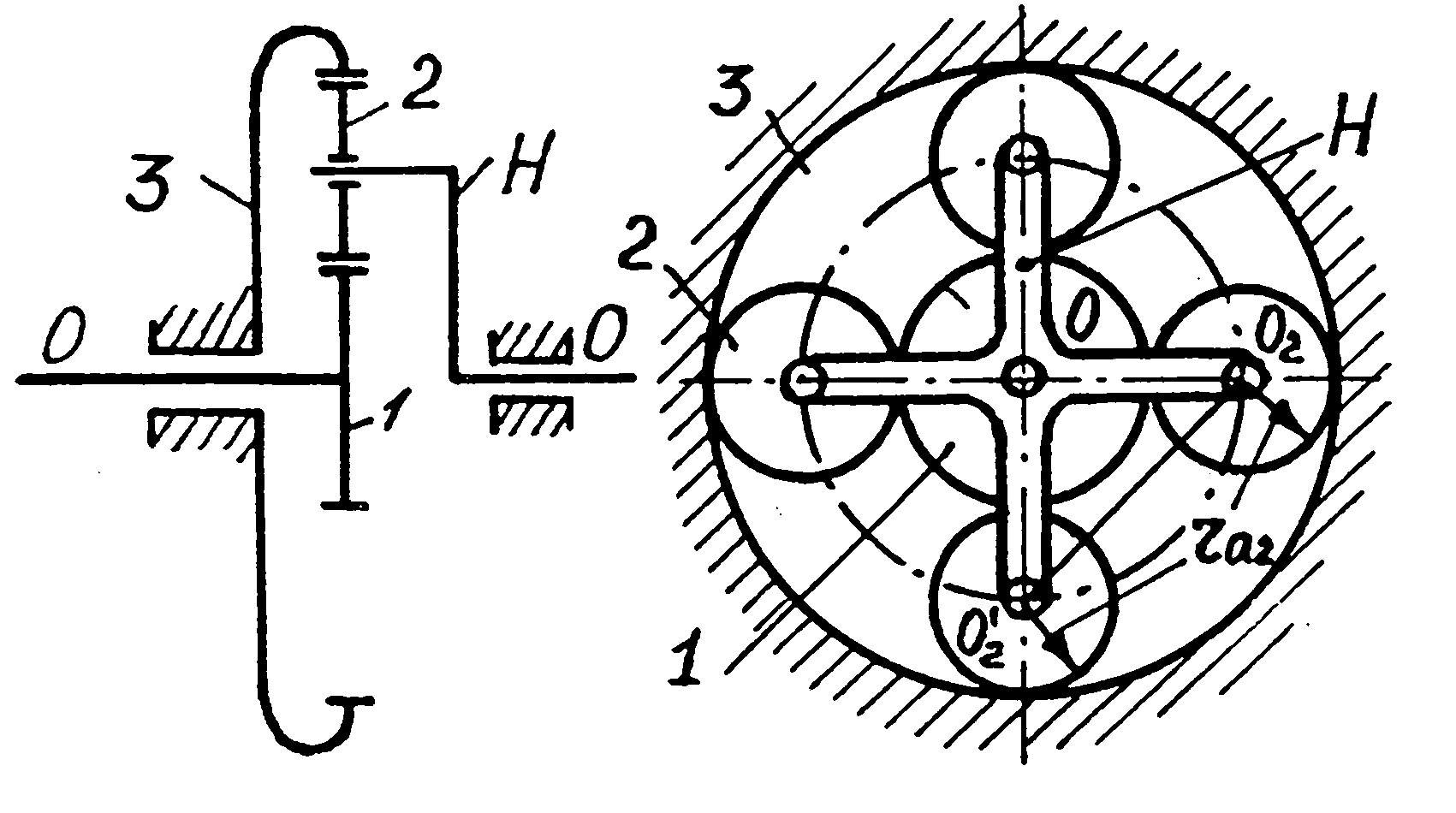 ис.14.1
ис.14.1
Таким чином число зубів сателітів залежить від числа зубів центральних коліс. Із рівняння /14.5/ випливає, що оскількі Z2 повинно бути числом цілим, то числа зубів Z1 I Z3 повинні бути або обидва парними, або обидва непарними.
Умова складання.
При числі сателітів рівним одиниці, передача завжди може бути складена, якщо виконується умова співвісності. В загальному випадку при числі сателітів К>1 цієї умови уже недостатньо.
Для того щоб механізм, який включає К сателітів, міг бути складений, тобто зуби сателітів одночасно могли ввійти в зачеплення з зубами обох центральних коліс, необхідно, щоб відношення суми чисел зубів центральних коліс до числа сателітів було цілим числом, тобто :
![]() ,
,
де С – ціле число.
Умова сусідства.
Для забезпечення умови сусідства необхідно, щоб сусідні сателіти не черкалися головками зубців, тобто щоб відстань між центрами обертання сателітів була більшою двох радіусів кіл вершин, тобто
O2O2`>2ra2 . /14.7/
Визначивши із рис.14.1 відстань O2O2` і виразивши ra2 через модуль і число зубів, знайдемо :
![]() /14.8/
/14.8/
Нерівність /14.8/ забезпечує умову сусідства, тобто умову не черкання сусідніми сателітами один одного.