

16.3. Тертя в клинчастому і циліндричному жолобі.
Нехай повзун, який має форму клина, рухається рівномірно і паралельно осі жолоба.
До повзуна прикладені: рушійна сила FР , паралельно осі жолоба; сила тяжіння Fg , напрямлена перпендикулярно до цієї осі; дві рівні нормальні реакції FN1 і FN2, перпендикулярні до граней жолоба і дві рівні сили тертя Ff1 і Ff2 напрямлені протилежно швидкості клина /рис, 16. 4, а/.
Сумарна сила тертя Ff = Ff1 + Ff2 при рівномірному русі повзуна, дорівнює рушійній силі FР і визначається згідно /16.1/
![]() /16.10/
/16.10/
Побудуємо для повзуна план сил /рис. 16. 4, б/. Із трикутника сил маємо:
![]() /16.11/
/16.11/
де α - кут, який складає кожна грань клина з вертикальною площиною. Визначимо нормальну реакцію із /16. 11/
![]() /16.12/
/16.12/
Сила тертя згідно /16. І/ буде:
![]() /16.13/
/16.13/
д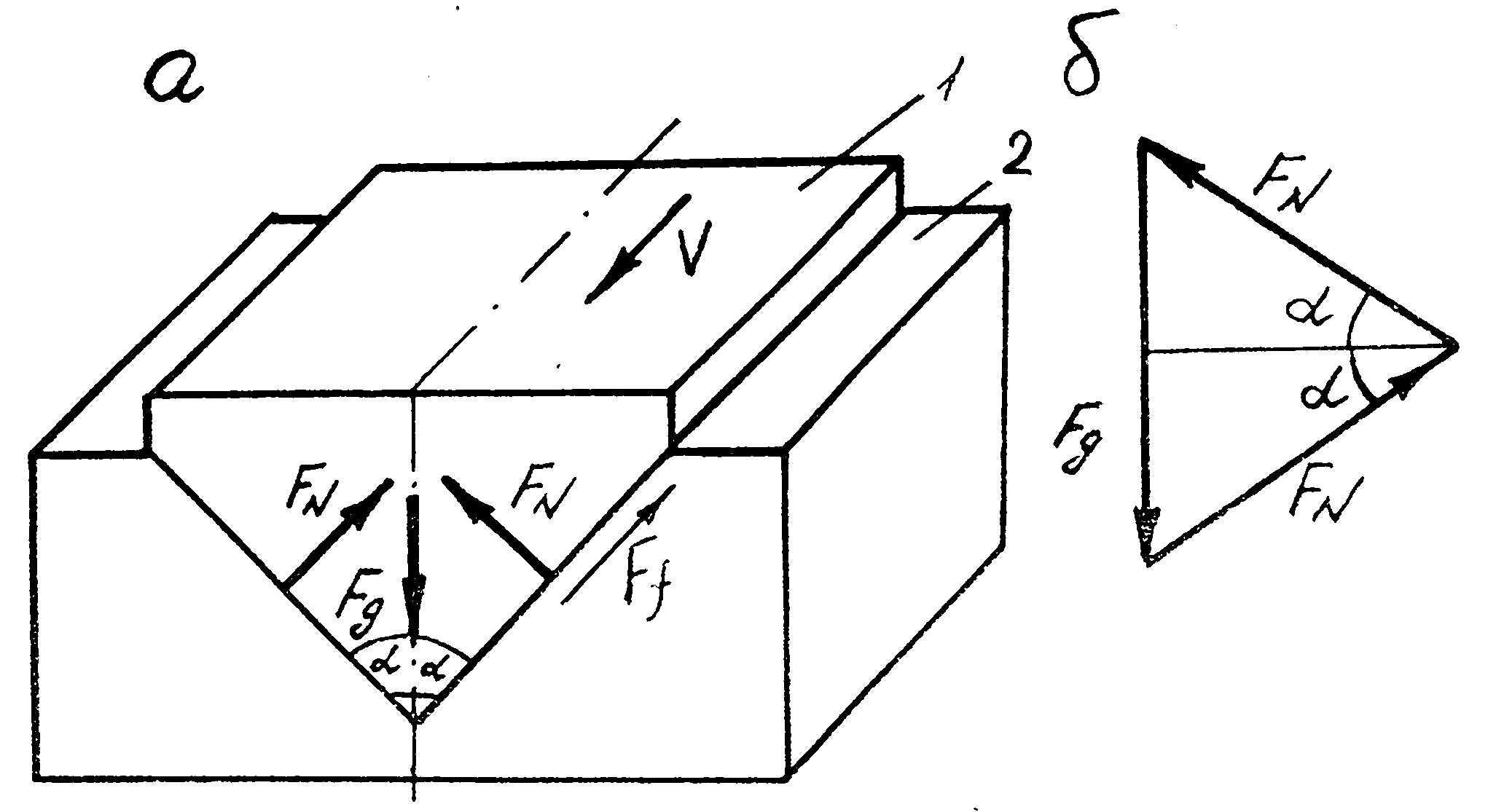 е
е
![]() - називається
приведеним
коефіцієнтом
тертя
клинчастого
повзуна, причому f
‘ >
f.
- називається
приведеним
коефіцієнтом
тертя
клинчастого
повзуна, причому f
‘ >
f.
Клинчаста пара
а - клинчастий жолоб; б - план сил
Рис.16.4
Розглянемо тертя циліндричного повзуна в жолобі /рис.16.5/.
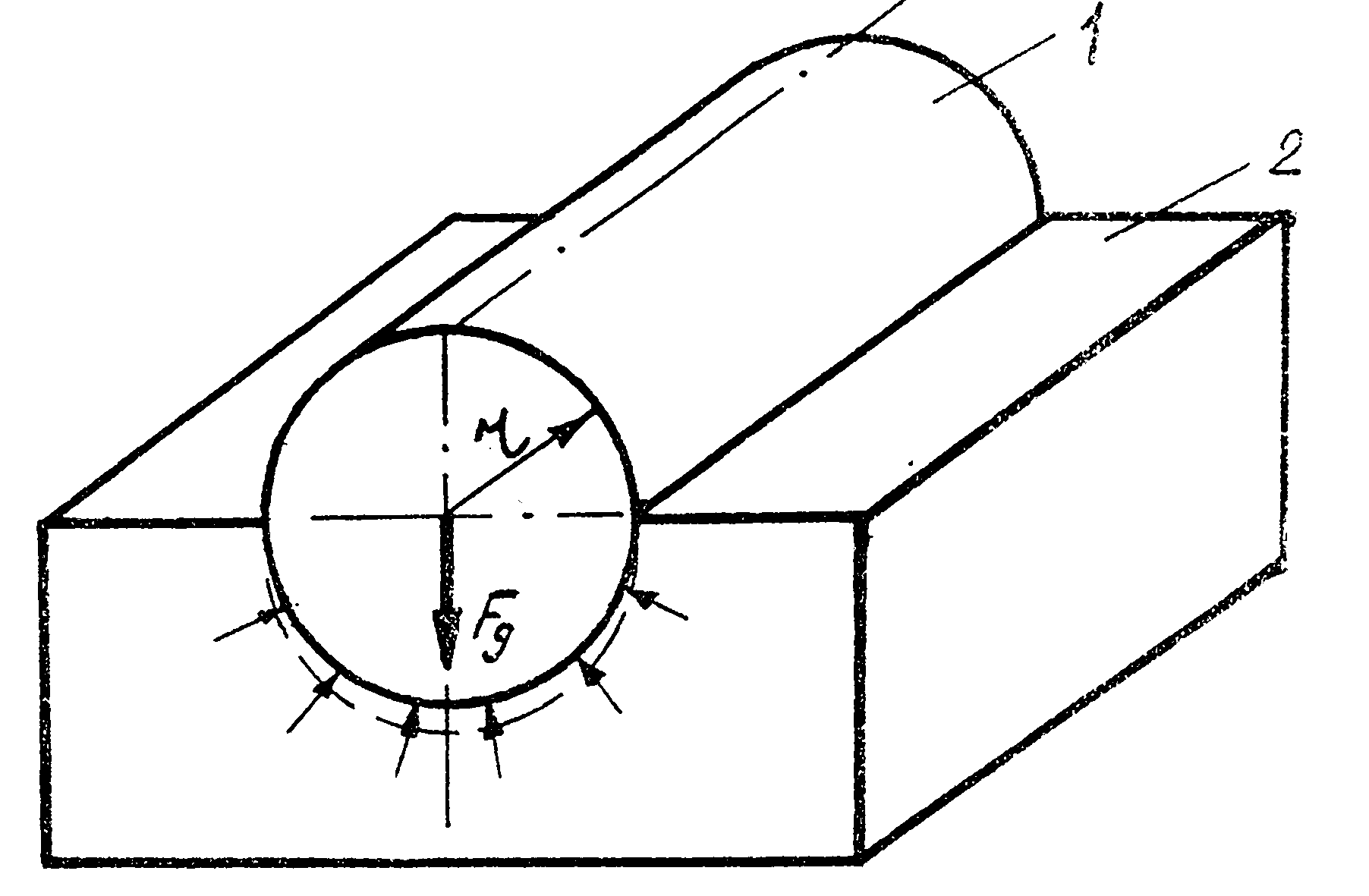 Циліндричний
жолоб
Циліндричний
жолоб
Рис.16.5
Сила тертя визначається за формулою:
![]() /16.14/
/16.14/
де f ‘ = 1,27 f - приведений коефіцієнт тертя.
16.4. Тертя в гвинтовій парі.
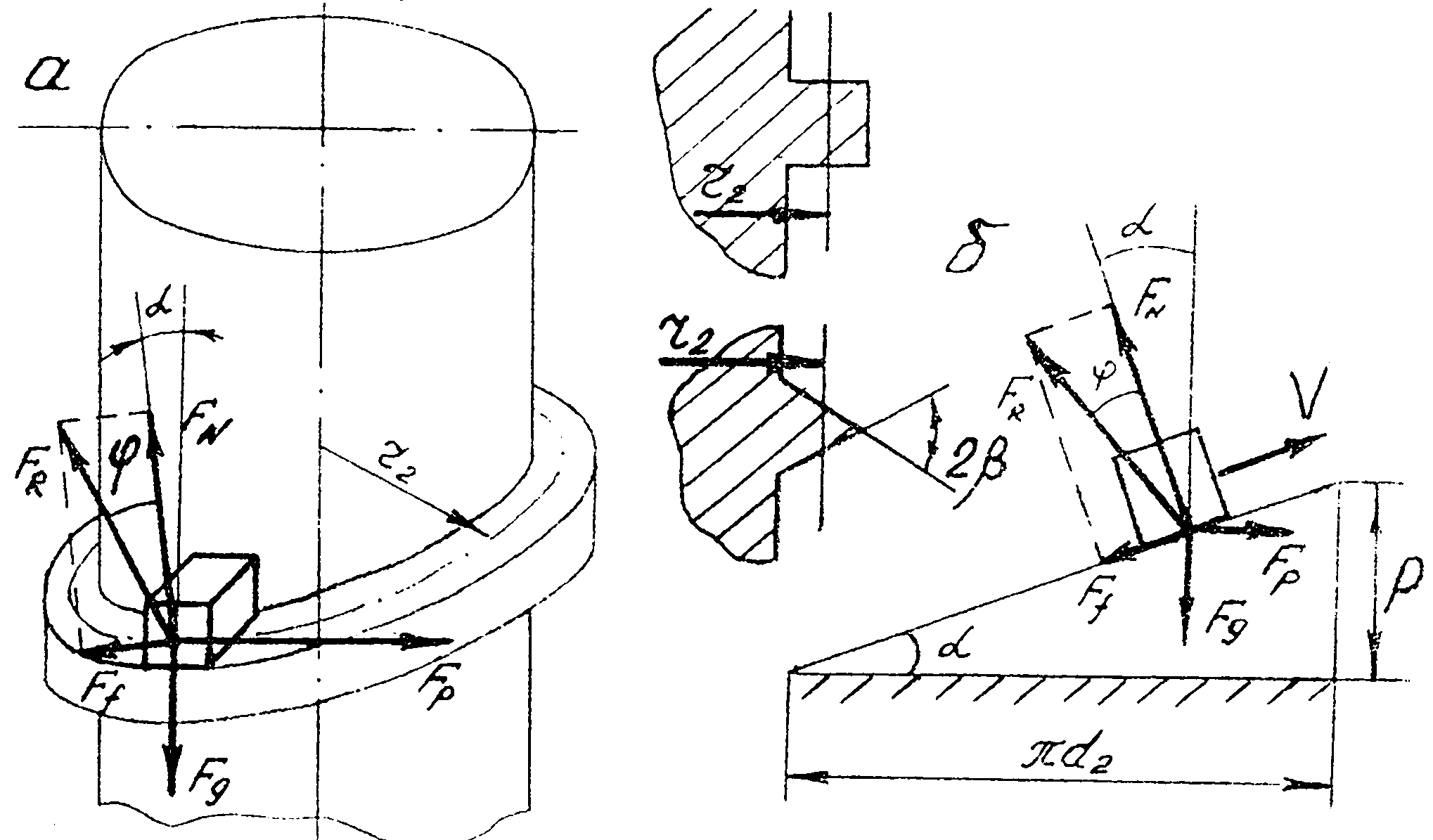
Умовно будемо вважати, що сила дії гайки на гвинт прикладена по середньому діаметру різьби. Середній діаметр різьби розміщений на відстані r2 від осі гвинта. Припустимо, що дію сил в гвинтовій парі можна звести до дії сил на повзун, який знаходиться на похилій площині .
Розглянемо тертя в прямокутній гвинтовій різьбі /рис.16.6,а/. Нехай α - кут підйому гвинтової лінії різьби.
 Тертя
в
прямокутній
різьбі
Тертя
в
прямокутній
різьбі
а - пара гвинт-гайка; б - розгортка різьби
Рис. 16. 6
Розвернемо циліндр з прямокутною різьбою на площину. Тоді замість гвинтової лінії отримаємо похилу площину, на якій під дією горизонтальної рушійної сили FP буде переміщатися вгору паралепіпед, навантажений вертикальною силою Fg /рис. 16.6/.
Ця задача нічим не відрізняється від задачі, розглянутої раніше - тертя на похилій площині, якщо кут β = 0. А тому на основі раніше виведеного рівняння /16.6/, аналогічно запишемо:
![]() /16.15/
/16.15/
Оскільки при рівномірному русі сила тертя Ff дорівнює рушійній силі то момент тертя в прямокутній різьбі
![]() /16.16/
/16.16/
У випадку трикутної різьби вважаємо, що рух гвинта аналогічний переміщенню клинчастого повзуна в жолобі, у якого кут між вертикальною площиною і стінками жолоба α = 90°- β , де 2 β - кут профілю різьби.
Момент тертя в трикутній різьбі
![]() /16.17/
/16.17/
де φ - приведений кут тертя.
Згідно /16.2/ і враховуючи /16.13/ запишемо:
![]() .
/16.18/
.
/16.18/