

15.3. Механічні характеристики машин.
Механічною характеристикою двигуна, або робочої машини називають залежність силового параметра від одного чи кількох кінематичних параметрів і часу.
При доборі двигуна до робочої машини для узгодження оптимального значення кутових швидкостей треба, щоб механічна характеристика двигуна відповідала характеристиці робочої машини. Щоб зменшити габарити та масу агрегату, треба застосовувати швидкохідні двигуни, бо потужність двигуна N дорівнює
N=Mpω, /15.3/
де Mp - момент рушійних сил, ω - кутова швидкість.
У більшості машинних агрегатів безпосереднє з'єднання двигуна з робочою машиною здійснити неможливо. Тому для збільшення величини крутного моменту і відповідного зменшення кутової швидкості між двигуном і робочою машиною встановлюють редуктор.
Залежно від типу двигуна чи робочої машини механічні характеристики бувають більш-менш складними. Розглянемо механічні характеристики деяких машин.
На рис 15.2 показані механічні характеристики електродвигунів постійного струму: а - з паралельним збудженням; б - з послідовним збудженням.
Механічні характеристики електродвигунів постійного струму
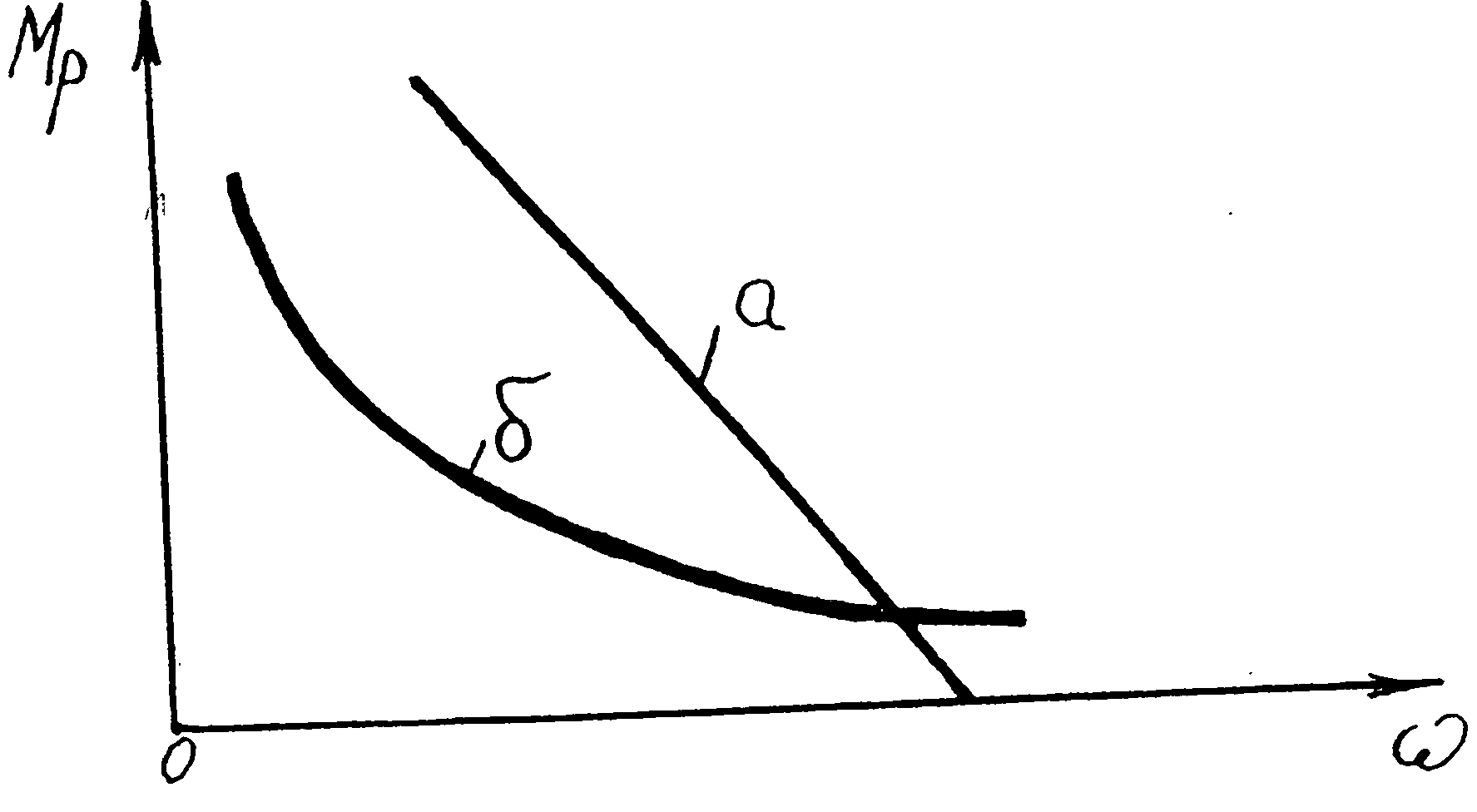
а - з паралельним збудженням; б - з послідовним збудженням
Рис.15.2
На рис.15.З показано механічну характеристику асинхронного електродвигуна трифазного струму.
Механічна характеристика цього двигуна складається з двох частин: перша - висхідна, нестійка частина розташована ліворуч Ммах; друга - низхідна, стійка частина розташована праворуч Ммах, ця частина являється робочою. При деякому значенні кутової швидкості ω , що відповідає номінальному моменту Мн, двигуна і номінальній швидкості ωн, двигун розвиває максимальну потужність. Кутова швидкість ωс, при якій Мр= 0, називається синхронною і з цією швидкістю ротор обертається під час холостого ходу. Точка а діаграми визначає положення максимального перекидного моменту Ммах мінімально допустимої кутової швидкості ωmin робочої частини характеристики, а т.О визначає початковий пусковий момент Мп при нульовій кутовій швидкості ротора. Умови роботи електродвигунів при низьких швидкостях обертання значно погіршуються.
М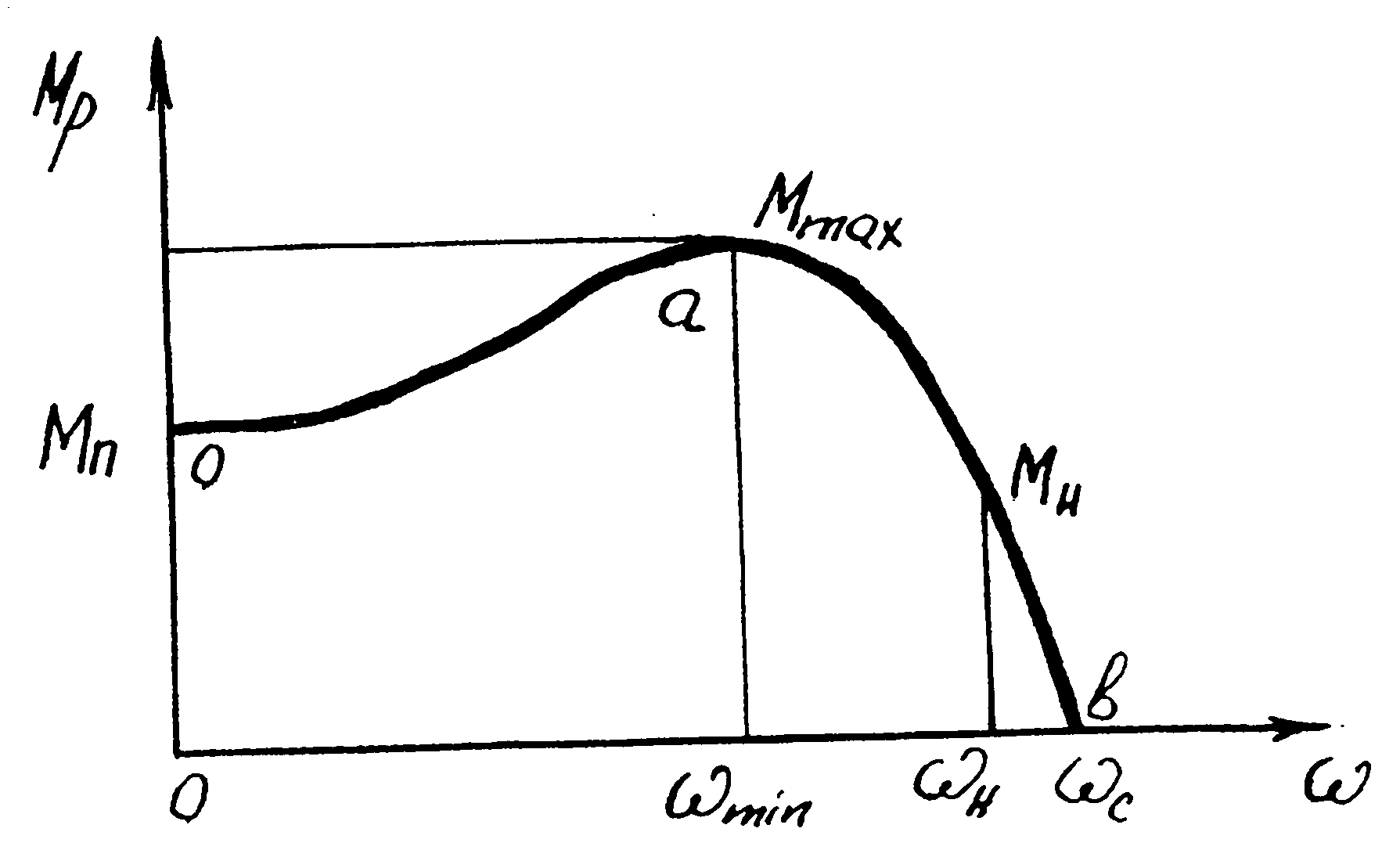 еханічна
характеристика асинхронного електродвигуна
еханічна
характеристика асинхронного електродвигуна
Рис 15.3
Механічна характеристика двигуна внутрішнього згоряння показана на рис.15.4 двома кривими, що виражають залежність моменту М, який розвивається на головному валу, і потужності N від швидкості ω.
Механічна характеристика двигуна внутрішнього згорання
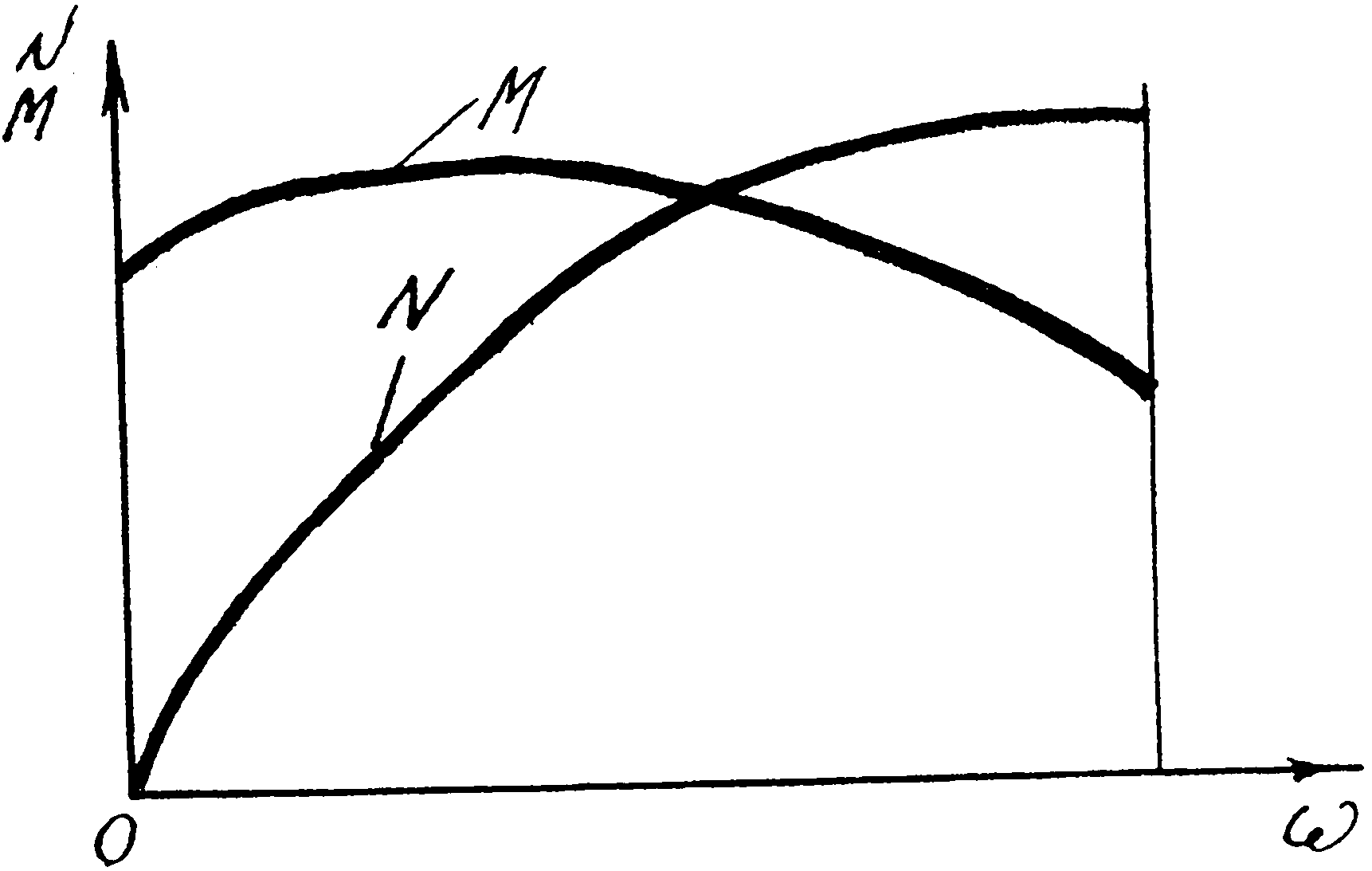
Рис.15.4
15.4. Режими руху механізмів.
Механізм являє собою механічну систему з двосторонніми не залежними від часу зв'язками, що рухається під дією сил. Тому при розв'язанні деяких питань динаміки механізмів з одним ступенем вільності можна визначити закон зміни кінетичної енергії. Цей закон формулюється так: приріст кінетичної енергії механізму на кінцевому його переміщенні дорівнює алгебраїчній сумі робіт усіх заданих сил і реакцій зв'язків на відповідних переміщеннях точок їх прикладання
T – T0 = ΣA, /15.4/
де
![]() - кінетична енергія механізму в довільному
положенні;
- кінетична енергія механізму в довільному
положенні;
![]() - кінетична енергія
механізму в початковому положенні;
ΣА-алгебраїчна сума робіт усіх сил і
моментів, прикладених до механізму.
- кінетична енергія
механізму в початковому положенні;
ΣА-алгебраїчна сума робіт усіх сил і
моментів, прикладених до механізму.
Якщо ланка здійснює плоскопаралельний рух, то кінетичну енергію визначають за формулою:
![]() ,
/15.5/
,
/15.5/
де Іsi - динамічний момент інерції i ланки відносно осі, яка проходить через центр мас ланки; ωі - кутова швидкість i ланки; mi - маса i ланки; Vsi - швидкість центра мас i ланки. Перша складова правої частини рівняння /15.5/ являє собою кінетичну енергію в обертальному русі ланки, а друга - кінетичну енергію в поступальному русі тієї самої ланки.
При обертальному русі ланки навколо нерухомої осі 0 кінетична енергія визначається:
![]() ,
/15.6/
,
/15.6/
де Іsi - момент інерції ланки i відносно нерухомої осі 0 обертання.
Якщо ланка рухається поступально, то її кутова швидкість дорівнює нулю, і для обчислення кінетичної енергії цієї ланки досить використати другий член правої частини рівняння /15.5/.
Кінетична енергія усього механізму дорівнює сумі кінетичних енергій усіх його ланок:
 ,
/15.7/
,
/15.7/
де п - число рухомих ланок механізму.
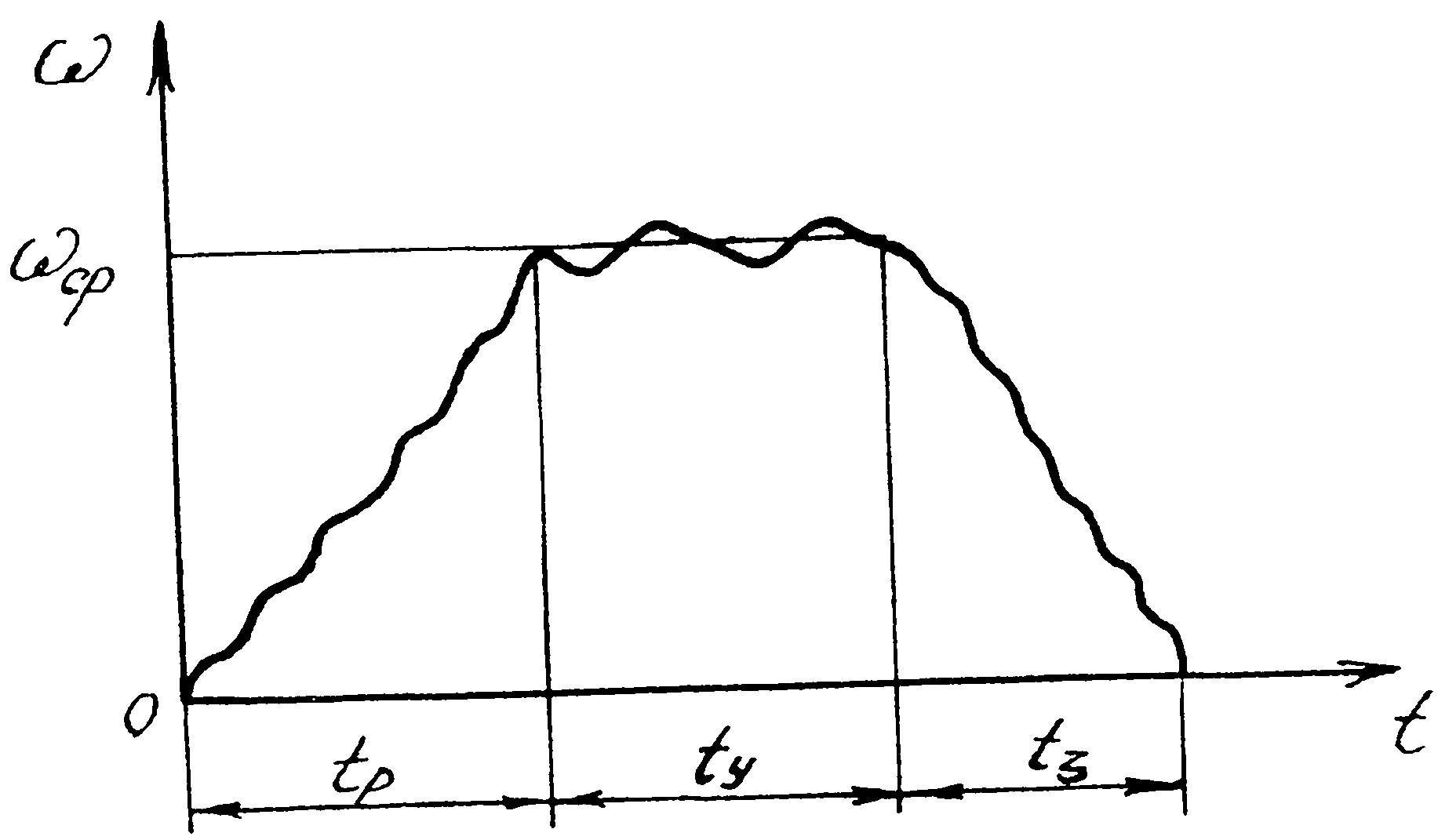
За характером зміни кінетичної енергії повний цикл роботи машинного агрегату в загальному випадку складається з трьох частин: розгону /пуску/, усталеного руху і вибігу /зупинки/ /рис.15.5/.
Час розгону tp характеризується збільшенням швидкості ведучої ланки від нуля до номінального значення, а це можливо за умови, якщо робота Ар рушійних сил більша, ніж робота Аоп усіх сил опору
Ар> Аоп. /15.8/
 Режими
руху
Режими
руху
Рис 15.5
Час зупинки характеризується зменшенням швидкості ведучої ланки від номінального значення до нуля, тоді
Ар < Аоп. /15.9/
Час розгону і час зупинки машини не повинен бути тривалим. Час усталеного руху tу найтриваліший, при цьому русі
Ар = Аоп. /15.10/
Протягом цього часу виконується корисна робота, для здійснення якої і призначений агрегат.
Робота Аоп усіх сил опору складається із суми робіт Ако сил корисного /виробничого/ опору і робіт Af сил тертя та інших невиробничих опорів:
Аоп = Ако+ Af. /15.11/