

Лекція 17. Тертя ковзання в обертальних та кочення у вищих кінематичних парах.
План лекції:
17.1. Тертя в обертальних парах: цапфі, п'яті.
17.2. Тертя гнучкої ланки по нерухомому барабану.
17.3. Тертя кочення у вищих кінематичних парах.
17.3.1. Переміщення вантажу на катках.
17.3.2. Переміщення вантажу на візку.
17.1. Тертя в обертальних парах: цапфі, п'яті.
Вали можуть передавати на опори як радіальні, так і осьові зусилля.
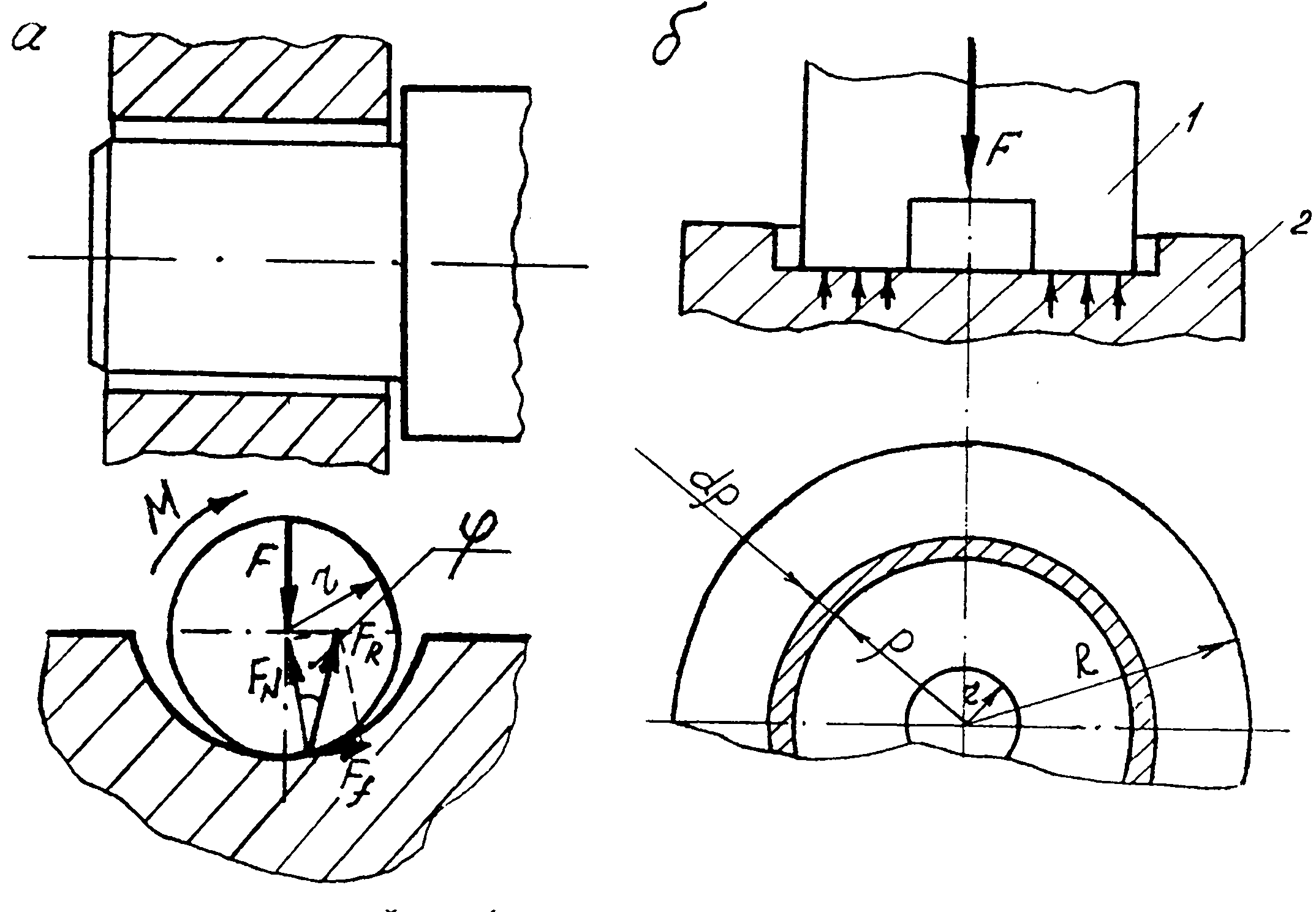
Розглянемо випадок, коли вал передає на опору радіальне зусилля, тобто визначимо момент тертя в цапфі /рис.17.І,а/.
 Обертальні
кінематичні
пари
Обертальні
кінематичні
пари
Рис.17.І
Момент тертя в цапфі визначається за формулою:
![]() /17.1/
/17.1/
f `= 1,27f - приведений коефіцієнт тертя в припрацьованій цапфі.
Визначимо момент тертя в п'яті /вал передає на опору осьове зусилля/, /рис.17.1,б/.
В цьому випадку на поверхні стикання п'яті 1 і підп'ятника 2 виникає сила тертя вертіння, яка підкоряється закону Амонтона-Кулона.
На рис.17.І,б показана кільцева п'ята, яка має опорну поверхню у вигляді кільця шириною R - r.
Величина питомого тиску Р на одиницю площі постійна і рівна
![]() /17.2/
/17.2/
Виділимо на опорній поверхні п”яті кільце радіусом ρ і шириною d ρ
Елементарний момент тертя dМf на цій площі
![]() /17.3/
/17.3/
Елементарна сила тертя рівна
![]() /17.4/
/17.4/
Рівняння /17.3/ з врахуванням /17.4/ прийме вигляд:
![]() /17.5/
/17.5/
Проінтегруємо рівняння /17.5/ в границях від r до R
![]() /17.6/
/17.6/
Підставимо в рівняння /17.6/ значення Р Із /17.2/, отримаємо:
![]() /17.7/
/17.7/
Якщо п'ята суцільна, то r = 0 і рівняння /17.7/ прийме вигляд:
![]() /17.8/
/17.8/
17.2. Тертя гнучкої ланки по нерухомому барабану.
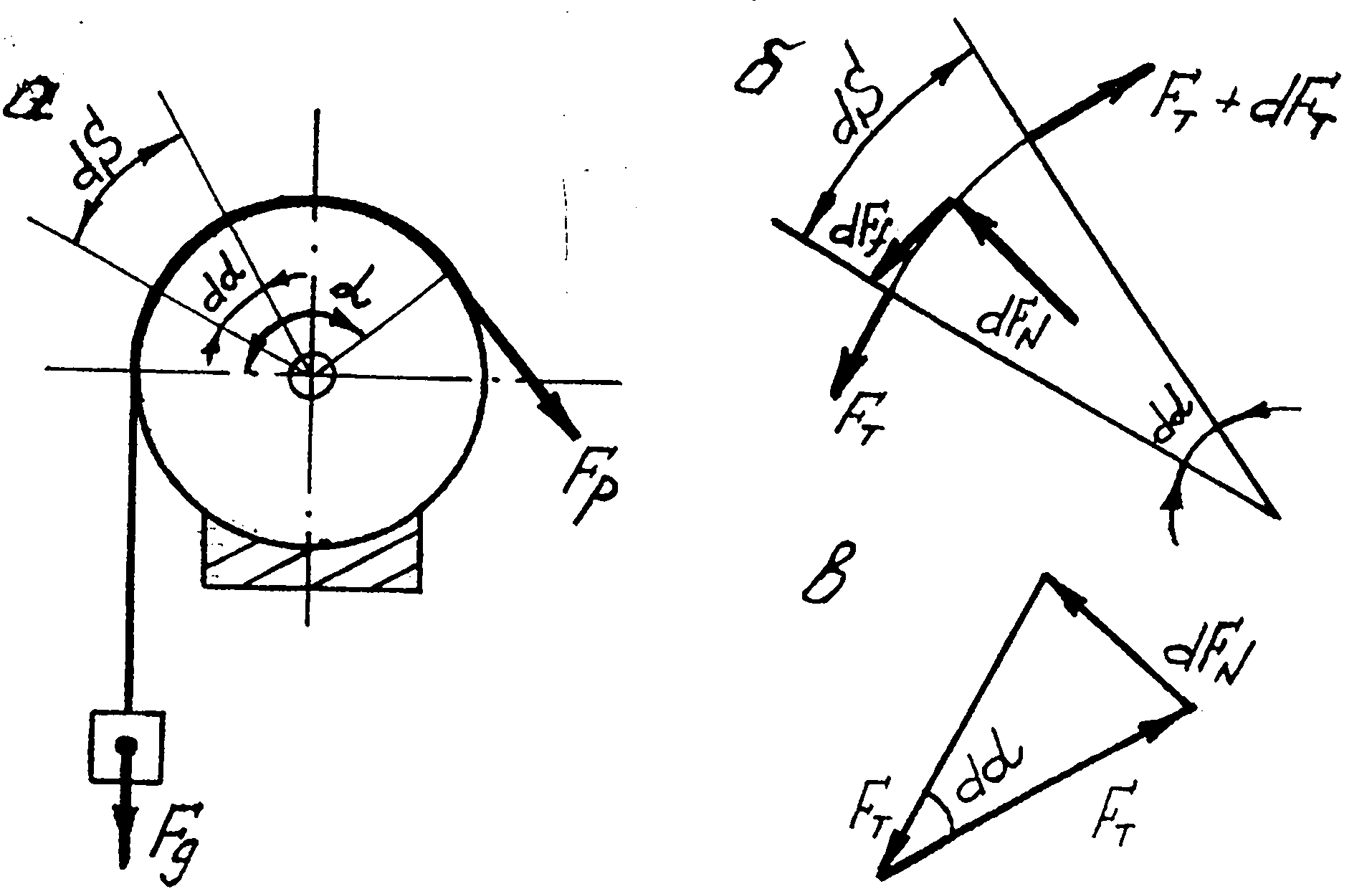
Розглянемо випадок, коли за допомогою гнучкої ланки /паса/, перекинутої через нерухомий циліндричний барабан, рушійною силою FP піднімається вантаж, на який діє сила тяжіння Fg /рис. 17. 2, а/. Нехай коефіцієнт тертя між гнучкою ланкою і барабаном f . Визначимо рушійну силу FP , необхідну для рівномірного переміщення вантажу вверх. Для надання гнучкій ланці рівномірного руху, необхідно перебороти силу тертя, яка виникає між гнучкою ланкою і барабаном. Позначимо кут в рад. обхвата пасом барабана α .
Виділимо на поверхні барабана елемент dS . Цей елемент буде знаходитися в рівновазі під дією нерівних сил натягу FT і нормальної реакції барабана FN і елементарної сили тертя dFf /рис. 17. 2, б/. Очевидно, що
![]() /17.9/
/17.9/
З іншого боку маємо:
![]() /17.10/
/17.10/
Гнучка ланка на барабані
а - барабан - гнучка ланка; б - елемент барабана; в - план сил
Рис. 17. 2
Порівнюючи /17.9/ І /17.10/, знаходимо:
![]() /17.11/
/17.11/
Отже, елементарна сила тертя зрівноважується елементарною силою натягу в dFT , а тому їх можна відкинути.
Побудуємо план сил /рис. 17. 2, в/. Складемо векторне рівняння сил:
![]() /17.12/
/17.12/
Із трикутника сил маємо:
![]() /17.13/
/17.13/
Відомо,
що
![]() і при
малих
кутах α,
і при
малих
кутах α,
![]() тоді рівняння
/17.13/ прийме
вид:
тоді рівняння
/17.13/ прийме
вид:
![]() /17.14/
/17.14/
Враховуючи значення dFN із /17.11/ знайдемо елементарну силу натягу dFT із /17. 11/
![]() або
або
![]() /17.15/
/17.15/
Проінтегруємо рівняння /17.15/:
![]() /17.16/
/17.16/
![]() ,
або
,
або
![]() /17.17/
/17.17/
Оскільки FT2 = FP, а FT1 = Fg то рівняння /17.17/ остаточно прийме вигляд:
![]() /17.18/
/17.18/
Ця залежність була отримана вперше Леонардом Ейлером в 1765 р.
Для клинового паса:
![]() /17.19/
/17.19/
де f’
- приведений коефіцієнт тертя
![]() кут
профілю
паса.
кут
профілю
паса.