

21.2. Зведені сили і моменти.
Зведеного силою /моментом/ називається сила /момент/, що замінює дію всіх сил і моментів в механізмі із умови рівності миттєвих потужностей зведеної сили /моменту/ і всіх сил і моментів, що зводяться.
Сила /момент/, що дорівнює за величиною зведеній силі /моменту/ і протилежно їй напрямлена, називається зрівноважувальною силою /моментом/.
![]() /21.1/
/21.1/
Точка, до якої прикладена зведена сила, називається точкою зведення, а ланка, до якої зводяться всі сили і моменти, називається ланкою зведення.
Нехай до механізму /рис.21.2,а/ прикладені сила F3 і момент M2.
В загальному випадку, на основі визначення зведеної сили /моменту/ можна записати:
![]() /21.2/
/21.2/
 Кривошипно
– повзун ний механізм
Кривошипно
– повзун ний механізм
- кінематична схема; б - повернутий план швидкостей
Рис.21.2.
Миттєві потужності визначаються за відомими формулами:
![]() /21.3/
/21.3/
![]() /21.4/
/21.4/
Із рівнянь /21.3/ та /21.4/ маємо:
![]() /21.5/
/21.5/
![]() /21.6/
/21.6/
Для конкретного механізму /рис.21.2,а/ із діючою силою F3 і моментом M2 зведена сила дорівнює:
![]() /21.7/
/21.7/
Зведений момент буде:
![]() /21.8/
/21.8/
Лінійні швидкості точок і кутові швидкості ланок можна визначити, побудувавши повернутий план швидкостей /рис.21.2,б/.
21.3. Теорема м.Є. Жуковського.
Знайти зведену силу, або зведений момент можна також, користуючись методом М.Є.Жуковського.
Теорема М.Є.Жуковського читається так. Якщо механізм під дією системи прикладених до нього сил перебуває в рівновазі, то і повернутий на 90° план швидкостей механізму, навантажений тими ж силами, прикла-деними в однойменних точках плану, також перебуватиме в рівновазі .
План швидкостей розглядається як жорсткий важіль з опорою в полюсі плану. Теорему Жуковського можна також застосувати до системи, яка не перебуває в рівновазі. Для цього потрібно крім діючих сил прикласти до системи ще й сили інерції, а моменти пар сил інерції замінити парами сил інерції. Система цих прикладених сил умовно перебуватиме в рівновазі і до них можна застосувати теорему Жуковського. Для доведення теореми скористаємось принципом можливих переміщень /принцип Даламбера/. Сума можливих робіт заданих сил Fj на елементарних переміщеннях δSj точок їх прикладання дорівнює нулю. Математичний вираз принципу можливих переміщень має вигляд:
![]() /21.9/
/21.9/
Поділимо /21.9/ на dt, дістанемо:
![]() /2І.10/
/2І.10/
де Fj
- задані сили; Vj
- швидкості точок прикладання сил Fj;
Vjcos(![]() ) проекції
швидкостей тих самих точок на лінії дії
сил Fj;
Nj
- потужності,
що розвивають сили Fj
.
) проекції
швидкостей тих самих точок на лінії дії
сил Fj;
Nj
- потужності,
що розвивають сили Fj
.
Н ехай
в точці j
ланки АВ
прикладена сила Fj
/рис.21.З,а/. Перенесемо цю силу паралельно
їй самій в однойменну точку j
/ повернутого на 90° плану швидкостей
ланки /рис.21.З,б/.
ехай
в точці j
ланки АВ
прикладена сила Fj
/рис.21.З,а/. Перенесемо цю силу паралельно
їй самій в однойменну точку j
/ повернутого на 90° плану швидкостей
ланки /рис.21.З,б/.
До теореми М.Є.Жуковського
а - ланка механізму; б - повернутий план швидкостей
Рис.21.3.
Із повернутого плану швидкостей потужність Nj сили можна визначити так:
![]() /21.11/
/21.11/
де
hj
- перпендикуляр,
опущений
із
полюса
PV
плану
швидкостей
на
лінію
дії
сили
Fi;
αj
- кут
між
вектором
швидкості
![]() і
плечем
hj.
Застосуємо
рівняння
/21.11/ для
всіх
сил
і
плечем
hj.
Застосуємо
рівняння
/21.11/ для
всіх
сил
![]() /21.12/
/21.12/
що і є доведенням теореми.
Застосуємо метод Жуковського для визначення зведеної Fзв, або зрівноважувальної Fзр сили.
Нехай на ланки 2 і 3 механізму /рис.21.4,а/ діють сили F2 і F3, прикладені в точках S2 і S3 . Сили F2 і F3 є рівнодійними всіх сил, що діють на механізм, включаючи і сили інерції.
Кривошипно-коромисловий механізм
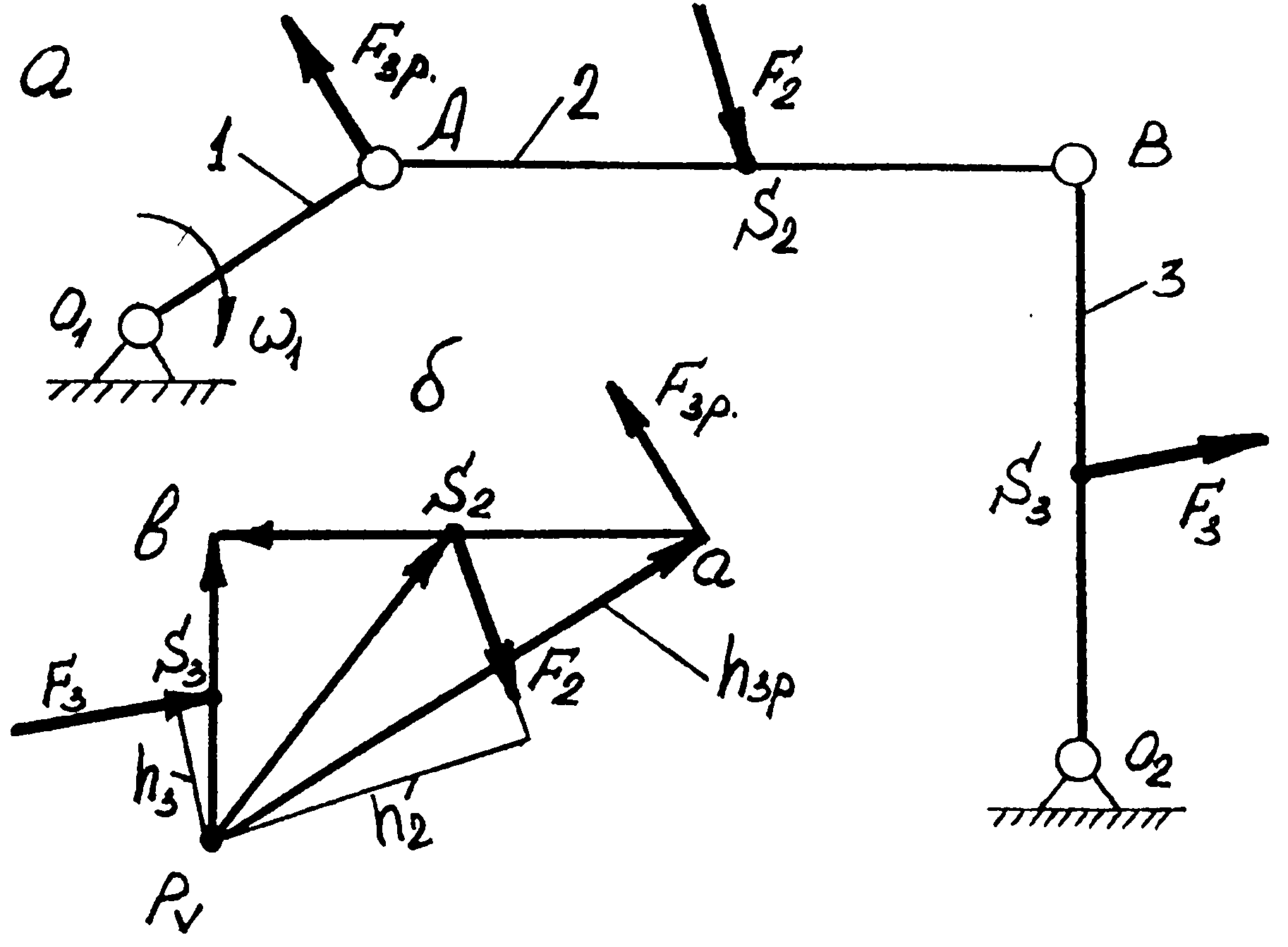
а - кінематична схема; б - повернутий план швидкостей
Рис.21.4.
Для зведення механізму до рівноважного стану необхідно прикласти зрівноважувальну силу Fзр в точці А кривошипа, спрямовуючи її перпендикулярно до О1А. Побудуємо в довільному масштабі повернутий план швидкостей механізму /рис.21.4,б/ і перенесемо вектори сил F2 і F3, а також зрівноважувальну силу Fзр паралельно самим собі в однойменні точки S2, S3 і a плану швидкостей.
Візьмемо суму моментів цих сил відносно полюса PV плану швидкостей, отримаємо:
![]() /21.14/
/21.14/
З рівняння /21.14/ визначимо величину зрівноважувальної сили:
![]() /21.14/
/21.14/
Якщо права частина рівняння після числового підрахунку буде додатною , то значить напрям сили Fзр вибраний вірно. При від'ємному значенні правої частини напрям сили Fзр треба змінити на протилежний. Визначивши зрівноважувальну силу Fзр і змінивши напрям її на протилежний, дістанемо зведену силу Fзв Зведена сила є умовною силою.