

19.3. 1. Кінетостатика груп Ассура і виду.
Механізми, утворені із груп Ассура І виду, застосовуються, наприклад, у верстатах, підйомних механізмах кранів і ін.
Накреслимо в
певному масштабі групу Ассура_І виду
/рис. 19. 2, а/. Нехай до ланки 2 прикладено
узагальнену силу
,
а до ланки 3 - узагальнену силу
![]() .
Лінію дії, величину і точки прикладання
обох сил задано. Дію від'єднаних ланок
механізму замінимо реакціями в
кінематичних парах FRi.
Ці реакції
невідомі як за величиною, так і за
напрямом.
.
Лінію дії, величину і точки прикладання
обох сил задано. Дію від'єднаних ланок
механізму замінимо реакціями в
кінематичних парах FRi.
Ці реакції
невідомі як за величиною, так і за
напрямом.
Розкладемо кожну
невідому, прикладену в центрі шарніра,
на дві складові: нормальну
![]() -
напрямлену вздовж відповідної ланки
і тангенціальну
-
напрямлену вздовж відповідної ланки
і тангенціальну
![]() - напрямлену
перпендикулярно
до
цієї
ж
ланки.
Тоді,
згідно
принципу
Даламбера,
група
буде
в
стані
рівноваги,
і
до неї
можна
застосовувати
рівняння
статики.
- напрямлену
перпендикулярно
до
цієї
ж
ланки.
Тоді,
згідно
принципу
Даламбера,
група
буде
в
стані
рівноваги,
і
до неї
можна
застосовувати
рівняння
статики.
Кожну ланку окремо також можна розглядати в стані рівноваги, так як дію однієї ланки на другу можна замінити реакцією в середній кінематичній парі.
Кінетостатика групи Ассура П кл., П пор., І виду
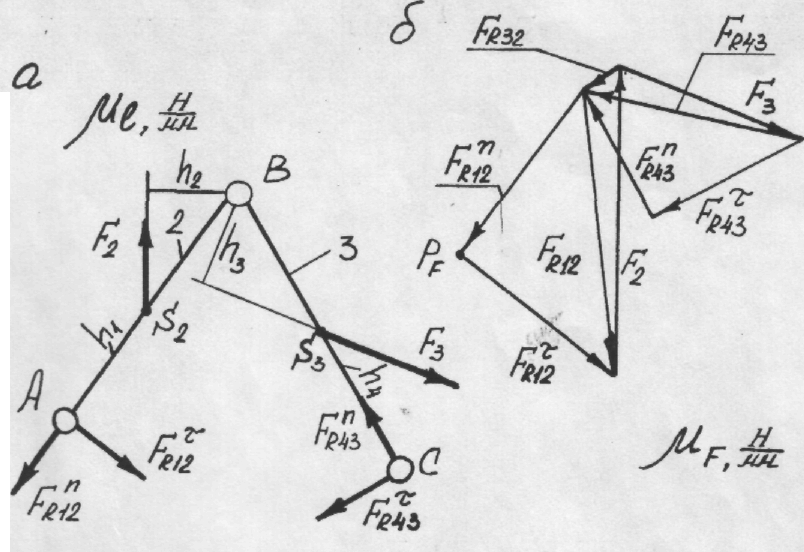
а - група Ассура І виду; б - план сил
Рис .19. 2
Визначимо тангенціальні складові реакції, розглянувши рівновагу окремо кожної ланки. Візьмемо суму моментів всіх сил відносно т.В для другої ланки:
![]() /19.4/
/19.4/
![]() /19.5/
/19.5/
Візьмемо суму моментів всіх сил відносно т.В для третьої ланки:
/19.6/
![]() /19.7/
/19.7/
Складемо векторне рівняння суми всіх сил, що діють на групу Ассура:
![]() /19.8/
/19.8/
Побудуємо план сил в масштабі /рис. 19.2,б/:
![]() /19.9/
/19.9/
де
![]() -
дійсне
значення
сили
в
Н;
f
- відрізок
на
плані
сил
в
мм,
що
зображає
дійне
значення
сили.
-
дійсне
значення
сили
в
Н;
f
- відрізок
на
плані
сил
в
мм,
що
зображає
дійне
значення
сили.
Вибираємо
довільну
точку
PF
- полюс
план
сил
і
з
неї,
в
вибраному
масштабі,
розпочинаємо
побудову
плана
сил.
Відкладемо
вектор,
що
зображає
реакцію
-
![]() Затим,
згідно
векторного
рівняння /19.8/
відкладаємо
послідовно
вектори
всіх
сил,
згідно
їх
величини і
напряму.
Проводимо
лінії
дії
нормальних
реакцій
Затим,
згідно
векторного
рівняння /19.8/
відкладаємо
послідовно
вектори
всіх
сил,
згідно
їх
величини і
напряму.
Проводимо
лінії
дії
нормальних
реакцій
![]() і
і
![]() до
їх
взаємного
перетину.
Повні
реакції
до
їх
взаємного
перетину.
Повні
реакції
![]() і
і
![]() отримаємо
додаванням
відповідних
нормальних
і
тангенціальних
складових.
отримаємо
додаванням
відповідних
нормальних
і
тангенціальних
складових.
Визначимо реакцію в середній кінематичній парі. Для цього розглянемо рівновагу однієї ланки, наприклад, другої. Складемо векторне рівняння:
![]() /19.10/
/19.10/
На плані сил
знайдемо реакцію![]() Для цього з'єднаємо кінець вектора
і
із початком вектора
.
Дійсні значення реакцій знайдемо
множенням відповідного відрізка, що
зображає цю реакцію на масштаб плана
сил, наприклад:
Для цього з'єднаємо кінець вектора
і
із початком вектора
.
Дійсні значення реакцій знайдемо
множенням відповідного відрізка, що
зображає цю реакцію на масштаб плана
сил, наприклад:
![]() /19.11/
/19.11/