

8.3. Кінематичний аналіз кулачкових механізмів.
При вивченні кулачкових механізмів може бути поставлено два завдання:
1/ аналіз /дослідження/ існуючих кулачкових механізмів;
2/ синтез /проектування/ нових кулачкових механізмів за заданими умовами.
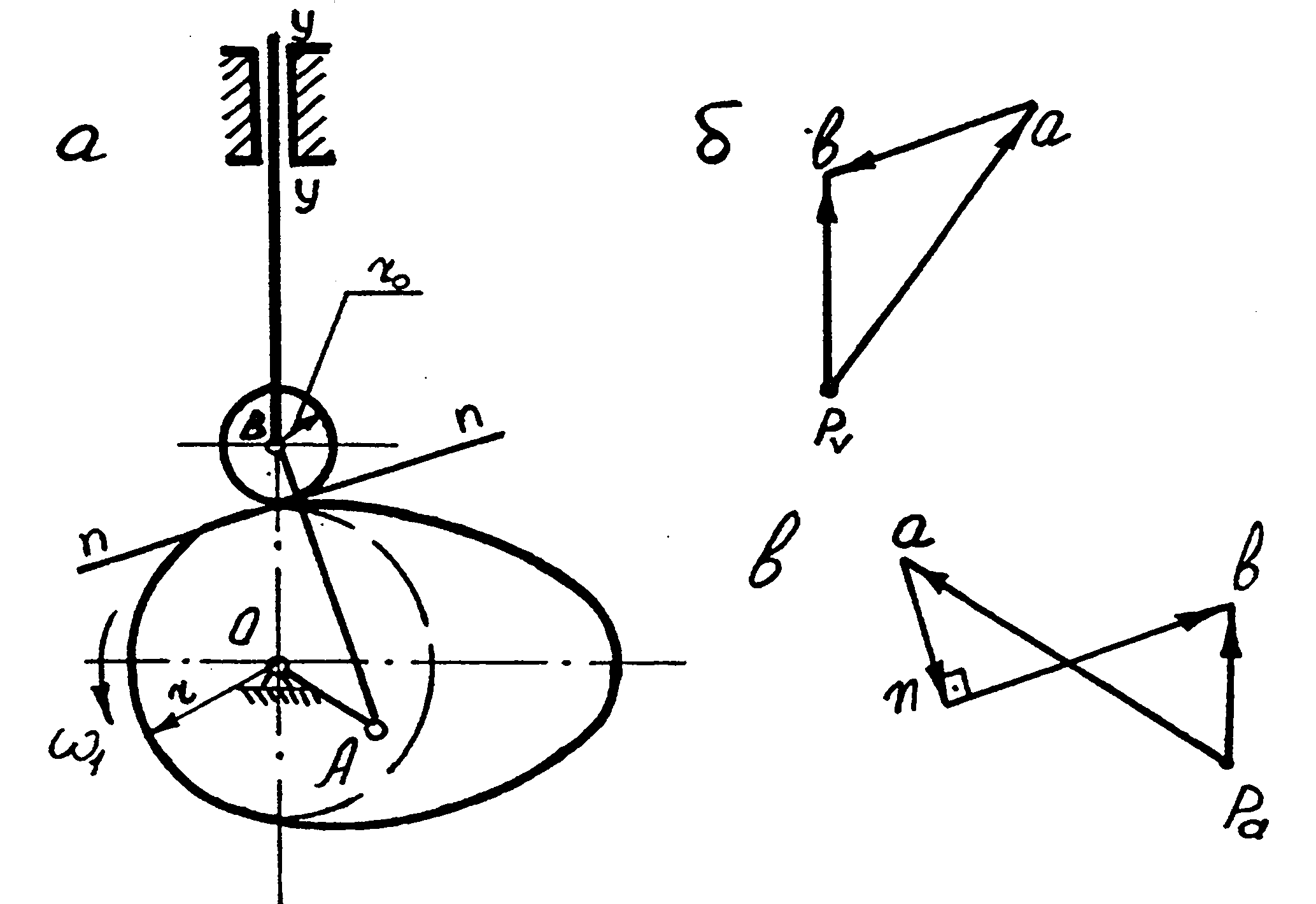
Аналіз кулачкових механізмів полягає у визначенні закону руху штовхача за відомою кінематичною схемою механізму /тобто профіль кулачка заданий/, /рис.8.6,а/.
Кінематичне дослідження кулачкових механізмів можна виконати аналітичними і графічними методами. Найчастіше застосовують графічні методи: метод графіків /діаграм/ та метод планів.
К інематичний аналіз кулачкових механізмів методом діаграм
Рис.8.6
8.3.1. Аналіз методом діаграм.
Почнемо аналіз кулачкових механізмів з методу кінематичних діаграм. Розмітимо переміщення з точки А штовхача умовної теоретичної схеми кулачкового механізму /рис.8.6,а/.
Для цього поділимо
коло, проведене з центру кулачка 0
найменшим радіусом rо
= ОА,
на довільне число рівних частин, наприклад
на вісім /дванадцять/. Коло радіуса rо
називають основним /початковим/ колом
кулачка. Через точки поділу з центра 0
кулачка проведемо промені до перетину
з профілем кулачка в точках 1![]() ,
2
,
3
...
З центра обертання кулачка 0 через точки
1
,
2
,
3
...
проведемо дуги до перетину їх з лінією
АС
руху центру штовхача. Дістанемо точки
1, 2, 3.., що зображають відповідні положення
точки А.
Відрізок А4
є найбільший хід штовхача.
,
2
,
3
...
З центра обертання кулачка 0 через точки
1
,
2
,
3
...
проведемо дуги до перетину їх з лінією
АС
руху центру штовхача. Дістанемо точки
1, 2, 3.., що зображають відповідні положення
точки А.
Відрізок А4
є найбільший хід штовхача.
Розмітивши переміщення точки А штовхача, побудуємо графік її руху /переміщення/ /рис.8.6,б/.
Відкладемо на осі
абсцис прямокутної системи координат
у деякому масштабі
![]()
![]() кути повороту кулачка, відповідно до
розмітки його профілю; по осі ординат
у масштабі
s
відповідні переміщення точки А
штовхача від його нижнього положення.
Сполучивши плавною кривою кінці ординат,
отримаємо діаграму переміщення штовхача
залежно від кута повороту кулачка.
кути повороту кулачка, відповідно до
розмітки його профілю; по осі ординат
у масштабі
s
відповідні переміщення точки А
штовхача від його нижнього положення.
Сполучивши плавною кривою кінці ординат,
отримаємо діаграму переміщення штовхача
залежно від кута повороту кулачка.
Затим, відомими
методами графічного диференціювання
можна побудувати діаграми аналогів
швидкості та прискорення штовхача
/рис.![]() 8.5,
в,г/.
8.5,
в,г/.
Побудова діаграм виконується методами, аналогічно, викладеним при кінематичному дослідженні важільних механізмів методом діаграм.
Масштаби побудованих діаграм визначаються за формулами:
Масштаб кута повороту кулачка
=
![]() ;
/8.1/
;
/8.1/
Масштаб переміщення
S
=
е,
![]() ; /8.2/
; /8.2/
масштаб аналогів швидкостей
![]() =
=
![]() ,
; /8.3/
,
; /8.3/
масштаб аналогів прискорень
![]() =
=
 ,
;
/8.4/
,
;
/8.4/
масштаб швидкості
v
=
![]()
![]() .
,
.
,
![]() ;
/8.5/
;
/8.5/
масштаб прискорення
![]() =
=
![]() *
*
![]() /8.6/
/8.6/
8.3.2. Аналіз методом планів.
Якщо потрібно більш точно визначити швидкість та прискорення штовхача в заданому положенні кулачкового механізму, то застосовують метод планів. Для цього будуємо замінюючий механізм, тобто кінематичну пару ІУ класу замінимо умовно кінематичними парами У класу. Кожному окремому положенню кулачкового механізму буде відповідати свій замінюючий механізм. Для його побудови необхідно визначити положення центра кривизни кулачка. В центрі кривизни кулачка /рис. 8.7, а/, та в центрі ролика ставляться кінематичні пари У класу і з’єднаються між собою, та центр обертання кулачка з’єднується з центром його кривизни. Отримаємо замінюючий механізм.
Затим будуємо план швидкостей в масштабі v та прискорень в масштабі для замінюючого механізму, як для звичайного кривошипно шатунного механізму /рис. 8.7, б, в/.
Визначимо швидкість точки А
VA
=
![]() . LOA.
/8.7/
. LOA.
/8.7/
Визначимо швидкість точки В
![]() ,
,
![]() –
ІІ у-у.
/8.8/
–
ІІ у-у.
/8.8/
Визначимо прискорення точки А
![]() А
=ω21.
LОА.
/8.9/
А
=ω21.
LОА.
/8.9/
Кінематичний аналіз кулачкових механізмів методом планів
Рис. 8.7
Визначимо прискорення точки В
![]() ,
/8.10/
,
/8.10/
![]() //.у-у.
//.у-у.
Побудову планів виконуємо методами, аналогічно викладеним при кінематичному дослідженні важільних механізмів методом планів.
Аналітичні методи дослідження кулачкових механізмів тут не розглядаються.
Дослідження кулачкових механізмів аналітичними методами можна виконати шляхом заміни вищих кінематичних пар ІУ класу нижчими парами У класу, тобто побудовою замінюючи механізмів, а затим досліджувати замінюючи механізми, аналогічно аналітичному дослідженню відповідних важільних механізмів, розглянутому в розділі І /лекція 7/.
Лекція 9. Синтез кулачкових механізмів
План лекції:
9.1. Кінематичний синтез кулачкових механізмів з роликовим та тарілчастим штовхачами.
9.2. Кут тиску та кут передачі руху.
9.3. Динамічний синтез кулачкових механізмів.
9.3.1. Визначення початкового радіуса профілю кулачка для кулачкових механізмів з роликовим штовхачем.
9.3.2. Визначення початкового радіуса профілю кулачка для кулачкових механізмів з тарілчастим штовхачем.
9.1. Кінематичний синтез кулачкових механізмів з роликовим та тарілчастим штовхачами.
Кінематичний синтез кулачкових механізмів полягає в тому, щоб за необхідними умовами побудувати профіль кулачка. До числа необхідних умов входять наступні вихідні дані:
1/ хід штовхача;
2/ найменший /початковий/ радіус профілю кулачка;
3/ фазові кути;
4/ закон руху штовхача;
5/ закон руху кулачка.
На
рис. 9.1. у певному масштабі побудовано
діаграму переміщень штовхача (µs,µφ)![]()
Діаграма переміщень штовхача
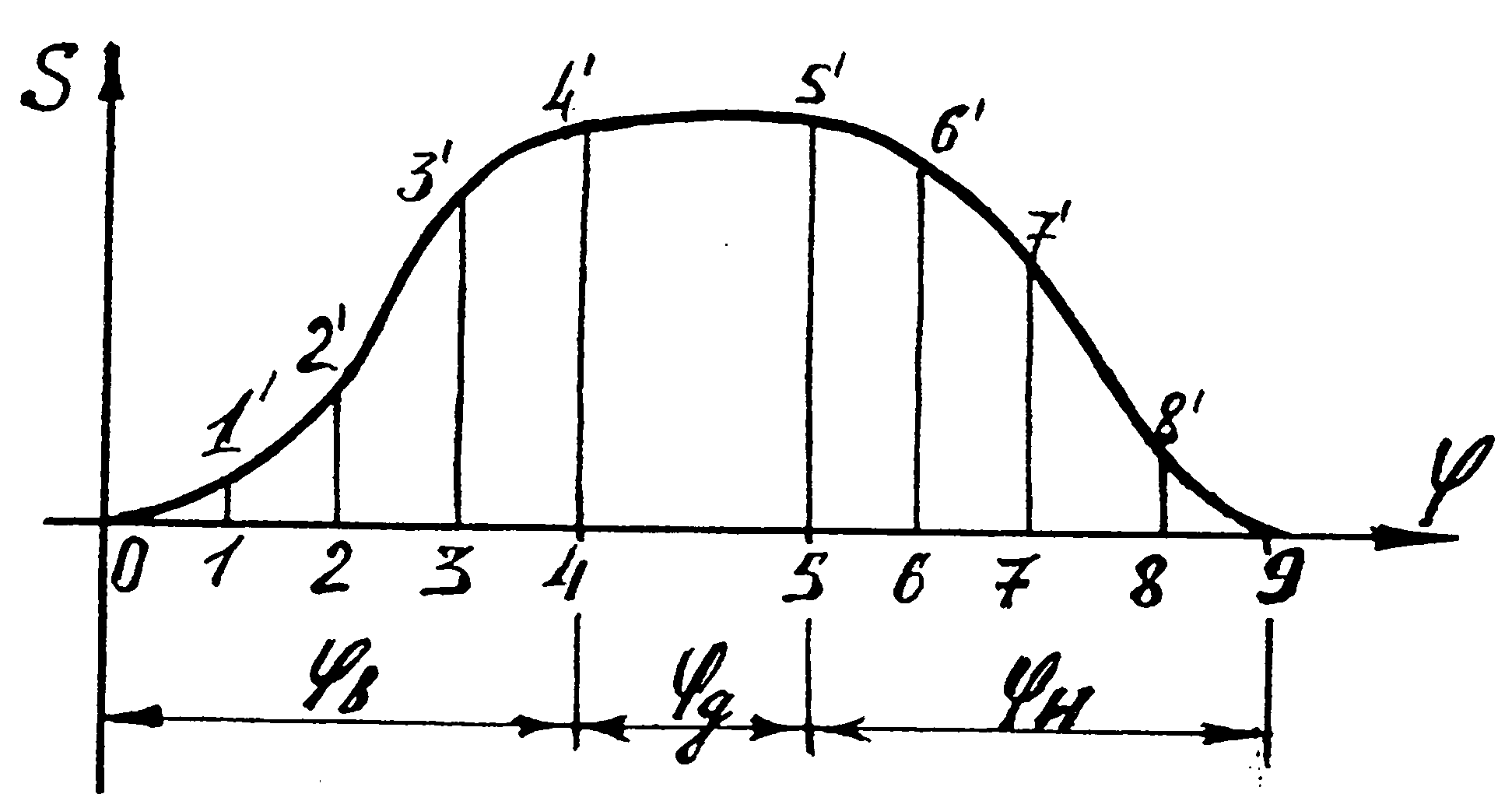
Рис. 9.1
По
осі абсцис відкладені фазові кути: кут
віддалення φв![]() ,
кут дальнього вистою φд
,
кут наближення φн
,
кут дальнього вистою φд
,
кут наближення φн
![]() .
По осі ординат – переміщення штовхача
на кожному фазовому куті. Керуючись
цією діаграмою, розмітимо хід штовхача.
Для цього поділимо фазові кути φв
і
φн
на декілька рівних частин, наприклад,
на чотири. Позначимо точки 0, 1, 2, 3 ... 9.
Проведемо із точок 1, 2, 3... вертикальні
лінії до перетину із діаграмою переміщення
штовхача. На перетині отримаємо точки
1’,
2`,
3` … Якщо кулачок повертається із
положення 0 в положення 1, то штовхач
віддалиться на величину 1-1`,
при повороті кулачка в положення 2
штовхач віддалиться на величину 2-2` і
т.д.
.
По осі ординат – переміщення штовхача
на кожному фазовому куті. Керуючись
цією діаграмою, розмітимо хід штовхача.
Для цього поділимо фазові кути φв
і
φн
на декілька рівних частин, наприклад,
на чотири. Позначимо точки 0, 1, 2, 3 ... 9.
Проведемо із точок 1, 2, 3... вертикальні
лінії до перетину із діаграмою переміщення
штовхача. На перетині отримаємо точки
1’,
2`,
3` … Якщо кулачок повертається із
положення 0 в положення 1, то штовхач
віддалиться на величину 1-1`,
при повороті кулачка в положення 2
штовхач віддалиться на величину 2-2` і
т.д.
Розглянемо профілювання кулачкового механізму з роликовим штовхачем.
Побудову
профілю кулачка будемо виконувати
методом інверсії, або методом оберненого
руху. Кулачковому механізму надано
кутову швидкість -
![]() ωk,
тоді кулачок зупиниться, а штовхач почне
обертатися навколо кулачка в напрямі,
протилежному обертанню кулачка, з
кутовою швидкістю ωk
ωk,
тоді кулачок зупиниться, а штовхач почне
обертатися навколо кулачка в напрямі,
протилежному обертанню кулачка, з
кутовою швидкістю ωk
Вибираємо точку 0 – положення центра обертання кулачка. Із центра 0 найменшим /початковим/ радіусом профілю кулачка r0 в масштабі описуємо основне /початкове/ коло /рис. 9.2, а/.
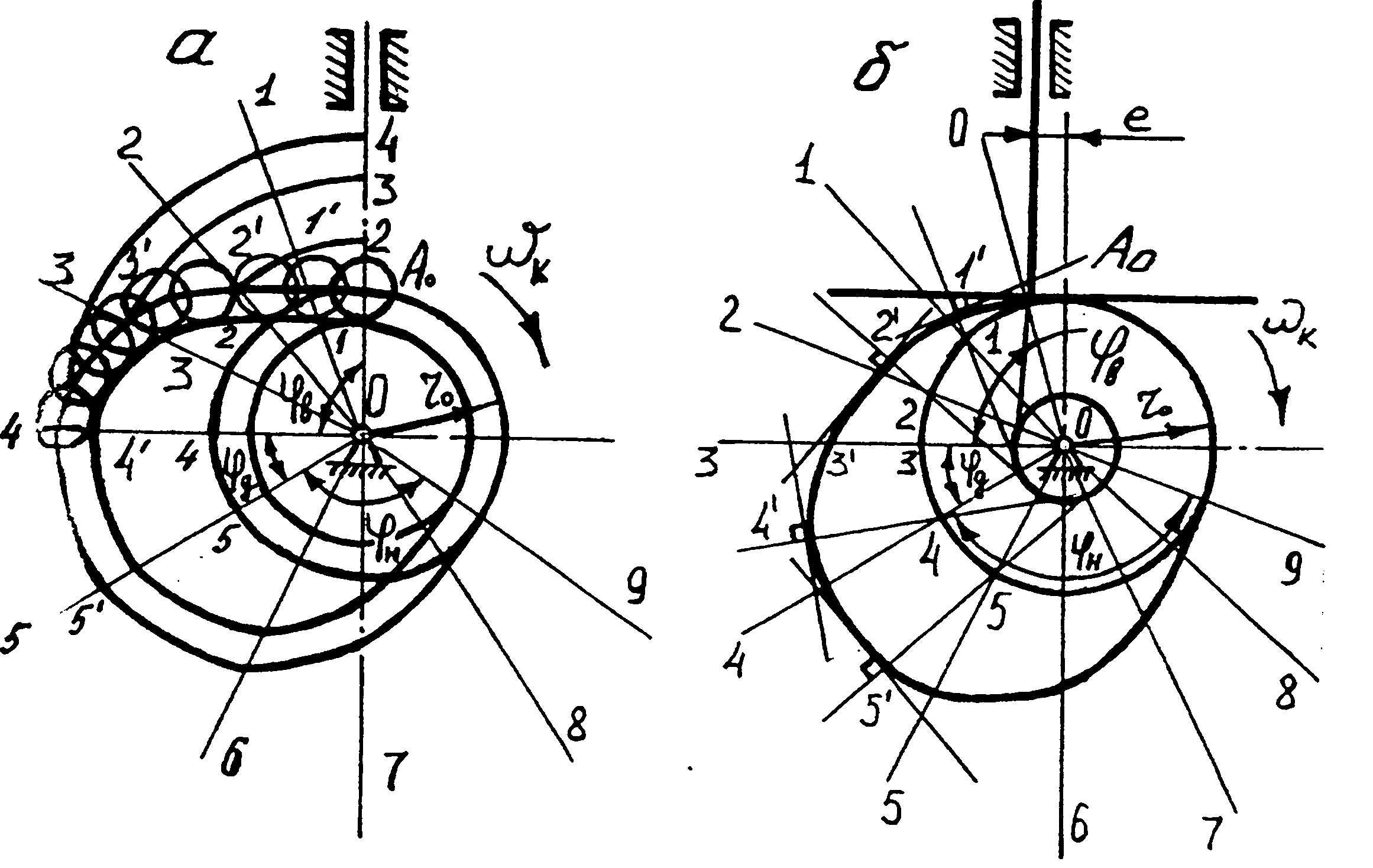 Профілювання
кулачка
Профілювання
кулачка
Рис. 9.2
Нехай штовхач обертається навколо основного кола профілю кулачка так, що точка А0 штовхача переміщується відносно основного кола у відповідності з діаграмою руху штовхача /рис. 9.1/. Точка А0 опише необхідний теоретичний профіль кулачка. Для практичного знаходження профілю кулачка поступаємо так. Відкладемо, починаючи від точки А0 в напрямі, зворотному обертанню кулачка, фазові кути φв ,φд ,φн . Радіальними лініями поділимо кути φв і φн на стільки рівних частин, на скільки вони поділені на діаграмі руху штовхача /рис. 9.1/, наприклад, на чотири. Отримаємо на основному колі точки 1,2,3 ... 9.
На променях 01, 02, 03 ... відкладемо від початкового кола, переміщення штовхача 1-1`, 2-2`, 3-3` … взяті із діаграми руху /рис. 9.1/. З’єднаємо плавною кривою отримані, на відповідних променях, точки 1`, 2`, 3`… отримаємо частину профіля кулачка на кутах φв і φн. Профілі кулачка, що відповідають фазам дальнього вистою φд і ближнього вистою φб будуть обмежені дугами кіл, які описано із центра 0 радіусами 0-4 і ОА0.
Таким чином, отримаємо повний теоретичний профіль кулачка. Якщо цей профіль обертати з кутовою швидкістю ω1, то можна стверджувати, що точка штовхача А0 здійснюватиме завданий закон руху, відповідно діаграмі /рис. 9.1/.
Якщо штовхач закінчується роликом, то будуємо еквідистантний центровому /теоретичному / профілю, практичний /конструктивний/профіль кулачка.
Радіус rp ролика визначаємо
rp = /0,3…0,4/ r0 /9.1/
Тепер штовхач разом з роликом обкатуємо по теоретичному профілю кулачка, так щоб центр ролика знаходився на теоретичному профілі. Для цього ніжку циркуля ставимо на теоретичний профіль і радіусом ролика rp робимо кола /засічки/ до їх взаємного перетину.
Вписавши плавну криву на відстані радіуса ролика rp від теоретичного профілю, отримаємо практичний, або конструктивний профіль кулачка.
Розглянемо профілювання кулачкового механізму з тарілчастим штовхачем, коли вісь штовхача зміщена відносно осі обертання кулачка /кулачковий механізм з ексцентриситетом/.
Побудову будемо виконувати методом інверсії, тобто аналогічно побудові кулачкового механізму з роликовим штовхачем.
Із центра 0 початковим радіусом профілю кулачка r0 = ОА0 в масштабі опишемо початкове коло /рис. 9.2, б/, а радіусом е – коло ексцентриситету. Сполучимо точку АО з центром 0. В напрямі, зворотному обертанню кулачка, починаючи від радіуса ОА0 , відкладемо фазові кути φв, φд, φн. Радіальними лініями поділимо фазові кути φв і φн на декілька рівних частин, наприклад, на чотири. Отримаємо на початковому колі точки 1,2,3 ... 9. через точки 1,2,3 ... проведемо дотичні до кола ексцентриситету. На цих дотичних будемо відкладати, від початкового положення штовхача т. 0 переміщення штовхача 1-1', 2-2', 3-3' ... із діаграми руху /рис. 9.1/. Затим в точках 1', 2', 3' ... проведемо прямі, перпендикулярні до відповідних дотичних, до взаємного перетину. Впишемо плавну криву в побудований багатокутник. Це і буде теоретичний і одночасно, для кулачкового механізму з тарілчастим штовхачем, конструктивний профіль кулачка.