

Структурна будова механізмів
План лекції:
2.1. Кінематичні пари та їхня класифікація.
2.2. Кінематичні ланцюги та їхня класифікація.
2.3. Структурні формули кінематичних ланцюгів. Сімейства меха- нізмів.
2.4. Принцип утворення механізмів.
2.1. Кінематичні пари та їхня класифікація.
Місце рухомого з'єднання двох ланок називається кінематичною парою. За характером стикання поверхонь кінематичні пари діляться на вищі і нижчі.
До нижчих пар відносяться пари, у яких стикання елементів проходить по поверхням /поршень з циліндром/.
До вищих пар відносяться пари, у яких стикання елементів проходить по лініям або точкам /колесо з рейкою/.
Способи з'єднання ланок в кінематичні пари, тобто сполучення елементів кінематичних пар бувають різноманітні. Теорію кінематичних пар розробив вчений Х.І.Гохман /1890р./. Ця теорія була вдосконалена вченими А.П.Малишевим, В.В. Добровольським і І.І.Артоболевським. Коротко її суть в наступному.
На відносний рух кожної ланки кінематичної пари накладаються певні обмеження, які залежать від способу з'єднання ланок пари.
Обмеження, накладені на відносний рух ланок кінематичної пари, називаються умовами зв'язку.
Розглянемо, які ж зв'язки і в якій кількості можуть бути накладені на відносний рух ланок кінематичної пари.
В загальному випадку всяке абсолютно тверде тіло, що вільно, рухається в просторі, має шість незалежних переміщень, тобто має шість ступенів вільності /рис.2.1/.
Абсолютно тверде тіло в просторі
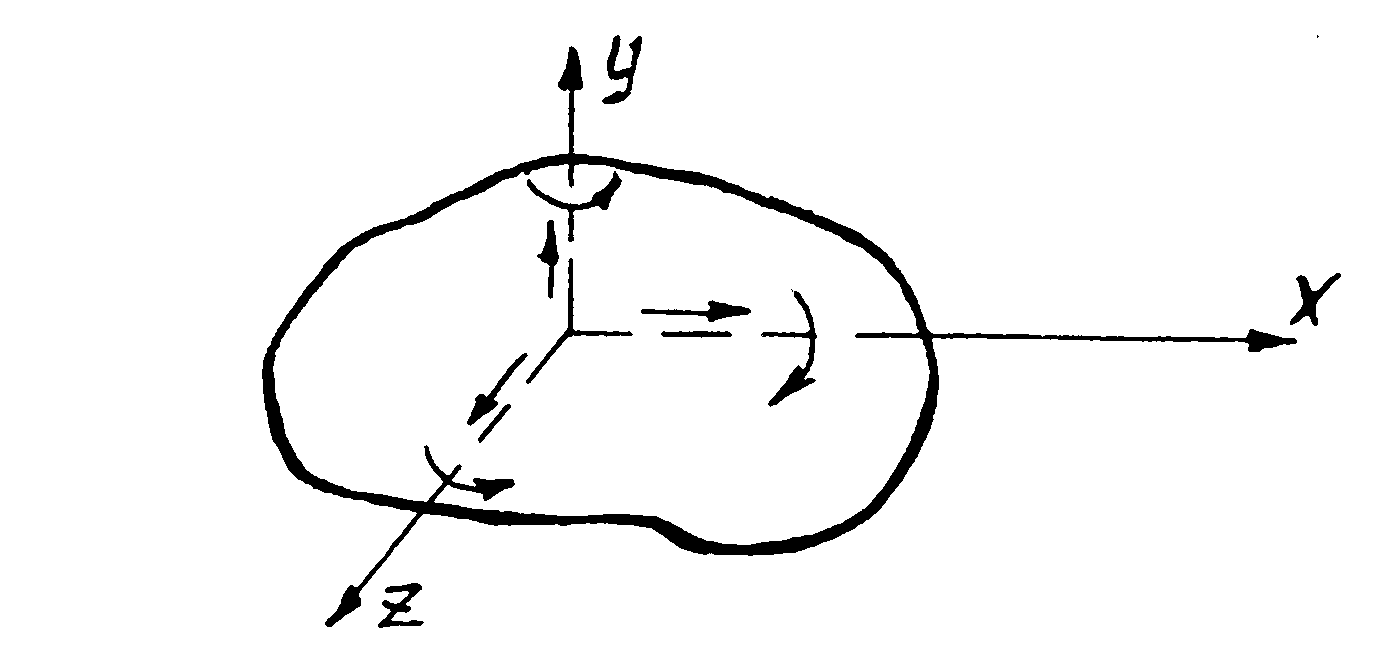
Рис.2.1
З’єднання однієї ланки рухомо з іншою ланкою, тобто утворення кінематичної пари накладає на відносний рух цих ланок обмеження, тобто умови зв'язку. Число умов зв'язку, очевидно, повинно бути цілим і меншим шести. Якщо число умов зв'язку дорівнює 6, ланки втрачають відносний рух і переходять в жорстке з'єднання. Якщо число умов зв'язку дорівнює нулю, то ланки не дотикаються і отже не утворюють кінематичної пари. Таким чином, число умов зв'язку змінюється від І до 5.
Число ступенів вільності Н ланки кінематичної пари з числом умов зв'язку S можна зв'язати виразом
Н = 6 - S . /2.1/
Зв'язки, накладені на відносний рух ланок кінематичної пари, обмежують ті можливі відносні рухи, які мають ланки. Всі кінематичні пари діляться на класи в залезкності від числа умов зв'язку.
Очевидно, оскiльки число умов зв'язку змінюється від І до 5, то число класів кінематичких пар дорівнює п'яти.
Клас кінематичної пари визначається числом умов, зв'язку. Із /2.1/ маємо
S = 6 - Н . /2.2/
Якщо кінематична пара має 5 ступенів вільності Н = 5, то згідно /2.2/ S = 6 -5= І; така кінематична пара відноситься до І класу.
Розглянемо найпоширеніші кінематичні пари /рис.2.2/.
На рис.2.2, а показано кінематичну пару - кулю І, що перекочується з ковзанням відносно площини 2. Рух кулі 1 відносно площини 2 можна розкласти на три обертальні рухи навколо осей x, y, z і два поступальні - вздовж осей х і y.
Переміщення кулі, вздовж осі z неможливе, тому що рух вниз обмежує площина, а при русі вверх пара пєрестає існувати. Для такої пари Н = 5, тоді згідно /2.2/ S = І, а тому ця пара відноситься до пар 1 класу.
Аналогічно розглянемо пару - куля І, розміщена в циліндрі 2 /рис.2.2, б/. Ця пара має чотири, ступені вільності та два зв'язки, отже вона відноситься до пар ІІ класу.
Трирухома кінематична пара /рис.2.2, в/ має три обертальні рухи навколо осей x, y, z і три зв'язки, а тому відноситься до пар ІІІ класу.
Дворухома кінематична пара /рис.2.2, г/ допускає два відносні рухи: обертальний і поступальний. Така пара має чотири зв'язки і відноситься до пар ІV класу.
До V-класу відносяться всі поступальні і обертальні кінематичні пари, а також умовно гвинтова пара - V кл. 3 вид /рис.2.2. д/.
Вид кінематичної пари визначається числом поступальних і обертальних рухів. Обертальним рухам надається перевага. Так, якщо для даного класу кінематичної пари є максимальне число обертальних рухів, то пара відноситься до першого виду, якщо обертальний рух замінено поступальним, то пара відноситься до другого виду і т.д.