

7.3. Аналітична кінематика кривошипно-повзунного механізму.
На рис. 7.2 показана кінематична схема кривошипно-повзунного механізму. Знайдемо в аналітичній формі залежності переміщення, швидкості і прискорення повзуна в функції повороту кривошипа.
Кривошипно-повзунного механізм
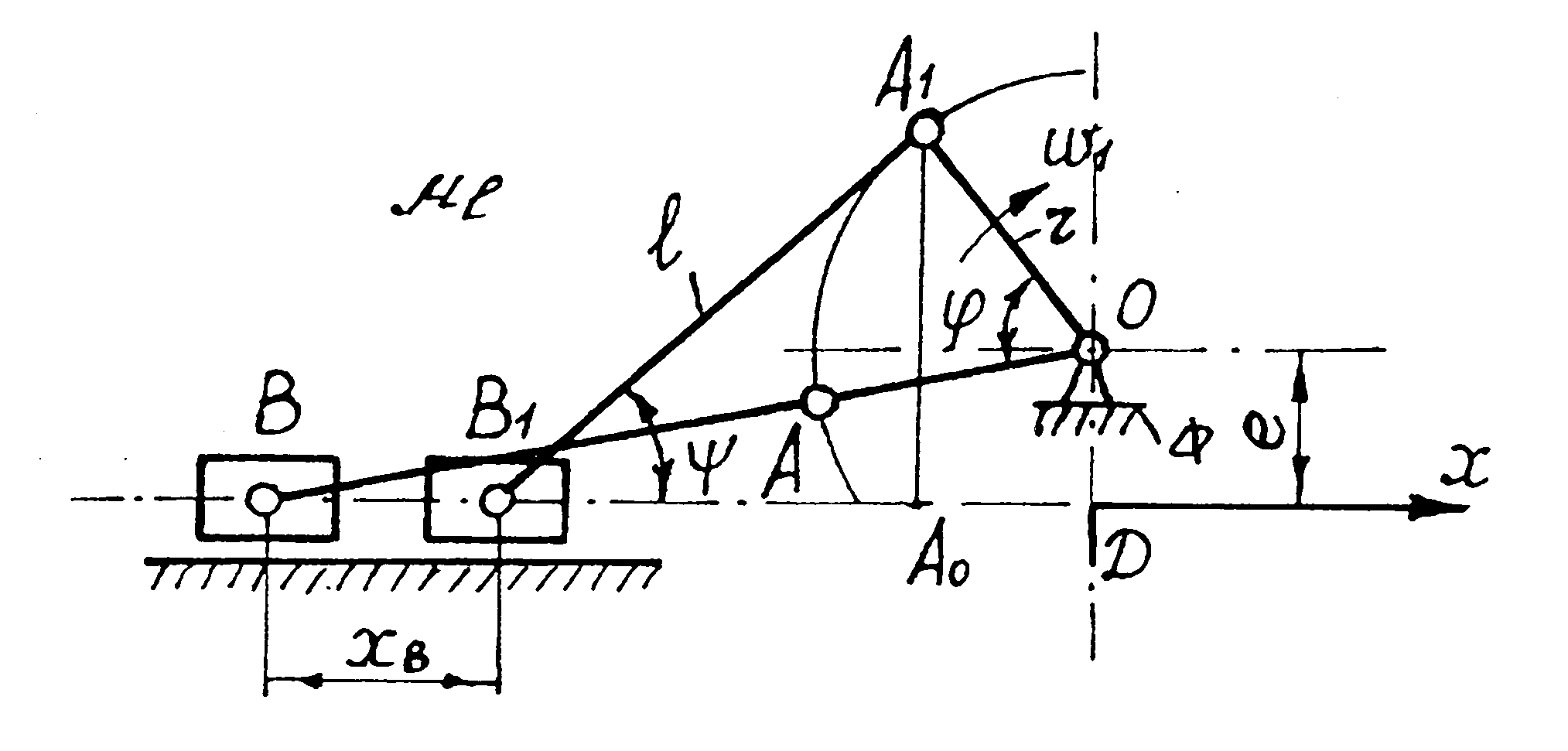
Рис. 7.2
Нехай кривошип ОА обертається з постійною кутовою швидкістю ω1, тоді кут повороту кривошипа φ = ωt.
Приймемо за початок відліку пройдених повзуном відстаней x точку, яка відповідає крайньому лівому положенню т.В.
Тоді в момент часу t величнина xB визначиться:
xB = ВД – В1Д . /7.16/
Позначимо довжину кривошипа r, довжину шатуна l, величину зміщення e і кут, який складає шатун з напрямом осі Bx, ψ.
Із рис. 7.2 знайдемо:
xB
=
![]() .
/7.17/
.
/7.17/
Довжина перпендикуляра A1A0, опущеного із т.А1 на вісь Bx:
А0А1 = r sinφ + e = l sinψ . /7.18/
Із рівняння /7.18/ знаходимо:
sinψ
=
![]() . /7.19/
. /7.19/
Із тригонометрії відомо, що
cos
ψ
=
![]() .
/7.20/
.
/7.20/
Підставимо значення cos ψ із /7.20/, враховуючи sinψ із /7.19/, в рівняння /7.17/, отримаємо:
xB
=
![]() . /7.21/
. /7.21/
Розкладемо другий радикал правої частини рівняння /7.21/ в ряд за формулою бінома Ньютона:
![]() /7.22/
/7.22/
В більшості випадків буває достатнім обмежитися першими двома членами рівняння /7.22/, оскiльки наступні члени рівняння дають порівняно малі значення.
Підставимо значення перших двох членів із /7.22/ в /7.21/, отримаємо наближене рівняння руху повзуна:
xB
=
![]() . /7.23/
. /7.23/
Візьмемо від x першу і другу похідну по часу, знайдемо швидкість і прискорення повзуна:
VB
= rω(sinφ
+
![]() sin
2φ
+
sin
2φ
+
![]() cosφ);
/7.24/
cosφ);
/7.24/
aB
= rω2(cosφ
+
![]() cos
2φ
-
sinφ).
/7.25/
cos
2φ
-
sinφ).
/7.25/
Для центрального кривошипно-повзунного механізму e=0. Крім того, позначимо відношення = λ. Тоді рівняння /7.23/... /7.25/ будуть мати вигляд:
xB
=
![]() ;
/7.26/
;
/7.26/
VB
= rω(sinφ
+
![]() λ
sin
2φ);
/7.27/
λ
sin
2φ);
/7.27/
aB = rω2(cosφ – λ cos 2φ). /7.28/
7.4. Аналітична кінематика кулісного механізму.
Розглянемо кінематичну схему механізму, зображену на рис. 7.3.
К улісний механізм
Рис. 7.3
Позначимо відстані: ОА = r1 ; O1A = l3 ; O1O = l4.
Із векторного контуру OAO1O маємо:
![]() .
/7.29/
.
/7.29/
Рівняння проекцій на осі координат xo1y:
![]() /7.30/
/7.30/
Для визначення кута ψ поділимо друге рівняння на перше системи рівнянь /7.30/
tg
ψ
=
![]() . /7.31/
. /7.31/
Із трикутника OAO1 за теоремою косинусів маємо:
![]() ,
/7.32/
,
/7.32/
де
cos (900 + φ) = - sin φ.
Рівняння /7.32/ дозволяє за заданим кутом поворота φ визначити миттєву довжину ланки l3.
Продиференціюємо рівняння /7.32/ за часом t, знайдемо:
l3![]() , /7.33/
, /7.33/
де
![]() = ω1;
= ω1;
![]() =
=
![]() .
/7.34/
.
/7.34/
Із рівняння /7.33/, враховуючи /7.34/, маємо:
= r1ω1![]() cosφ.
/7.35/
cosφ.
/7.35/
Взявши
похідну
вiд
по часу
t
можна знайти відносне прискорення
![]() .
.
=
![]() .
/7.36/
.
/7.36/
Кутову швидкість ω3 та кутове прискорення ε3 ланки 3 можна знайти дифернціюванням по часу t рівняння /7.31/
ω3
=
ω1
![]() . /7.36/
. /7.36/
Застосовуючи сучасні ЕОМ можна швидко розв’язати аналітичні рівняння і отримати лінійні швидкості та прискорення точок окремих ланок та кутові швидкості і прискорення ланок для різних механізмів, що утворені із двоповідкових груп Ассура.
Таким чином, підбираючи необхідні співвідношення між параметрами механізму, можна визначити раціональне їх поєднання для покращення роботи механізму в цілому.
ЗМІСТОВИЙ МОДУЛЬ 2.
Синтез та аналіз механізмів передач
Лекція 8.
Аналіз кулачкових механізмів
План лекції:
8.1 Загальні відомості. Види кулачкових механізмів.
8.2 Закони руху веденої ланки. Фазові кути.
8.3 Кінематичний аналіз кулачкових механізмів.
8.3.1. Аналіз методом діаграм.
8.3.2. Аналіз методом планів.
Механізм, в склад якого входить кулачок, називається кулачковим механізмом. Кулачком називається ланка, яка має змінну кривизну поверхні і надає переміщення штовхачу. Штовхач – це ланка, яка отримує рух безпосередньо від кулачка.
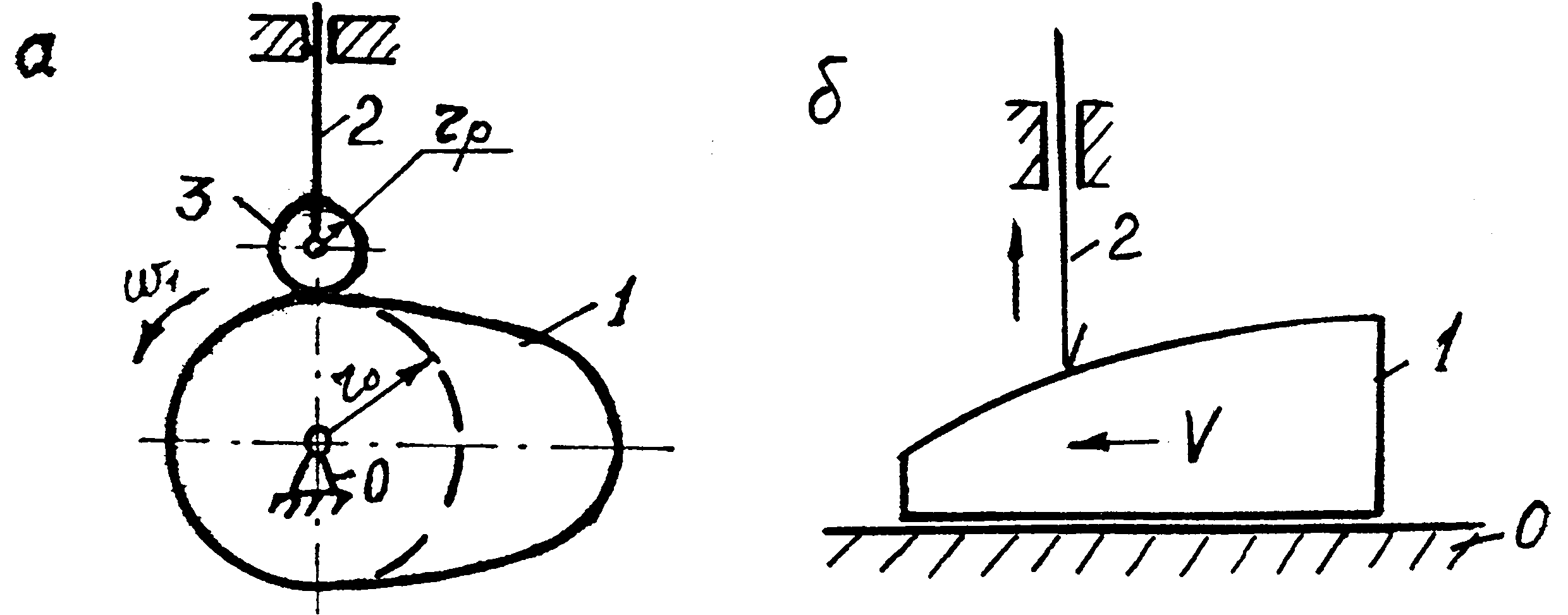 Кулачковий
механізм
Кулачковий
механізм
Рис.8.1
Найпростіший кулачковий механізм /рис.8.1/ складається із трьох ланок: кулачка 1, штовхача 2 і стояка 0.
Кулачкові механізми призначаються для перетворення будь – якого /безперервного/ руху ведучої ланки /кулачка/ в зворотно-поступальний або коливальний рух веденої ланки /штовхача/.
В деяких конструкціях кулачкових механізмів між кулачком і штовхачем розміщують проміжну ланку – ролик 3, який вільно обертається навколо осі, закріпленій на штовхачі. Цим досягається заміна тертя ковзання, тертям кочення, що значно зменшує знос поверхонь, як кулачка так і штовхача. Однак ролик ускладнює конструкцію кулачкового механізму.
При заданому законі обертання кулачка 1, штовхач 2 також буде виконувати рухи, згідно свого закону. Надаючи профілю кулачка відповідні обриси, завжди можна віднайти необхідний закон руху штовхача. Внаслідок цього кулачкові механізми широко застосовуються в різних галузях машинобудування.
Кулачок 1 і штовхач 2 утворюють кінематичну пару ІV класу. А тому кулачковому механізму властиві і ряд недоліків. Внаслідок точкового або лінійного контакту кулачка зі штовхачем виникає значний питомий тиск і, значить, знос ланок. Для зменшення зносу, ланки кулачкового механізму потрібно виготовляти із високоякісних матеріалів, а їх робочі поверхні відповідним чином обробляти. Крім цього, кінематична пара ІV класу дозволяє само розмикатися ланкам. Після того, як штовхач буде піднятий в крайнє верхнє положення, кулачок може почати відходити від штовхача, якщо не застосувати додаткових конструктивних заходів.
Кулачкові механізми діляться на плоскі і просторові.
За характером руху штовхача кулачкові механізми діляться на:
1/ кулачкові механізми з обертальним рухом кулачка і поступальним рухом штовхача /рис.8.2,а/;
2/ кулачкові механізми з обертальним рухом кулачка і обертальним рухом штовхача /рис.8.2,б/;
3/ кулачкові механізми з поступальним рухом кулачка і поступальним /обертальним/ рухом штовхача /рис.8.1,б/;
4/ кулачкові механізми із змішаним рухом, зустрічаються рідко.