

З убчасте зачеплення
Рис.11.2
Швидкість т. К, що належить колесу 2 перпендикулярна радіусу 02К рівна
![]() /11.4/
/11.4/
Проведемо через т.К загальну дотичну Т-Т і загальну нормаль N-N. Відмітимо т. Р перетину цієї нормалі з лінією центрів 0102. Із центрів 01і 02 опустимо перпендикуляри на нормаль N-N, отримаємо точки L1 та L2.
Ш![]() видкість
Vk1
розкладемо на два напрямки: по N-N
і
по Т-Т.
Нормальна складова швидкості
/11.5/
видкість
Vk1
розкладемо на два напрямки: по N-N
і
по Т-Т.
Нормальна складова швидкості
/11.5/
А![]() налогічно
отримаємо:
налогічно
отримаємо:
/11.6/
Д![]() ля
того, щоб зуби коліс не відходили один
від одного і не врізались один в другий
потрібно, щоб нормальні складові
швидкостей
ля
того, щоб зуби коліс не відходили один
від одного і не врізались один в другий
потрібно, щоб нормальні складові
швидкостей
![]() і
і
![]() були
рівні між собою за величиною і мали
однаковий напрям
були
рівні між собою за величиною і мали
однаковий напрям
/11.7/
Підставимо в /11.7/ значення із /11.5/ і /11.6/, отримаємо:
ω1O1L1=ω2O2L2. /11.8/
З![]() відси
маємо:
відси
маємо:
/11.9/
Я![]() кщо
трикутники О1
і L1P
і O2
L2P
подібні, то можна записати:
кщо
трикутники О1
і L1P
і O2
L2P
подібні, то можна записати:
. /11.10/
З![]() амінивши
відношення
амінивши
відношення
![]() в
/11.9/ із /11.10/ отримаємо:
в
/11.9/ із /11.10/ отримаємо:
/11.11/
З рівняння /11.11/ випливає формулювання основної теореми зачеплення – теорема Вілліса.
Загальна нормаль до профілів зубів в точці їх дотику ділить віддаль між центрами обертання зубчастих коліс на частини, обернено пропорційні їх кутовим швидкостям.
Точка Р називається полюсом зачеплення. При ω1/ω2=coпst, на основі /11.11/ знаходимо, що 02Р/01Р = coпst, тобто полюс зачеплення т.Р на лінії центрів займає стале положення. У випадку передачі обертального руху з сталим відношенням кутових швидкостей, профілі зубів повинні бути підібрані так, щоб загальна нормаль до них в будь – якій точці дотику К завжди проходила через одну і ту ж точку на лінії центрів.
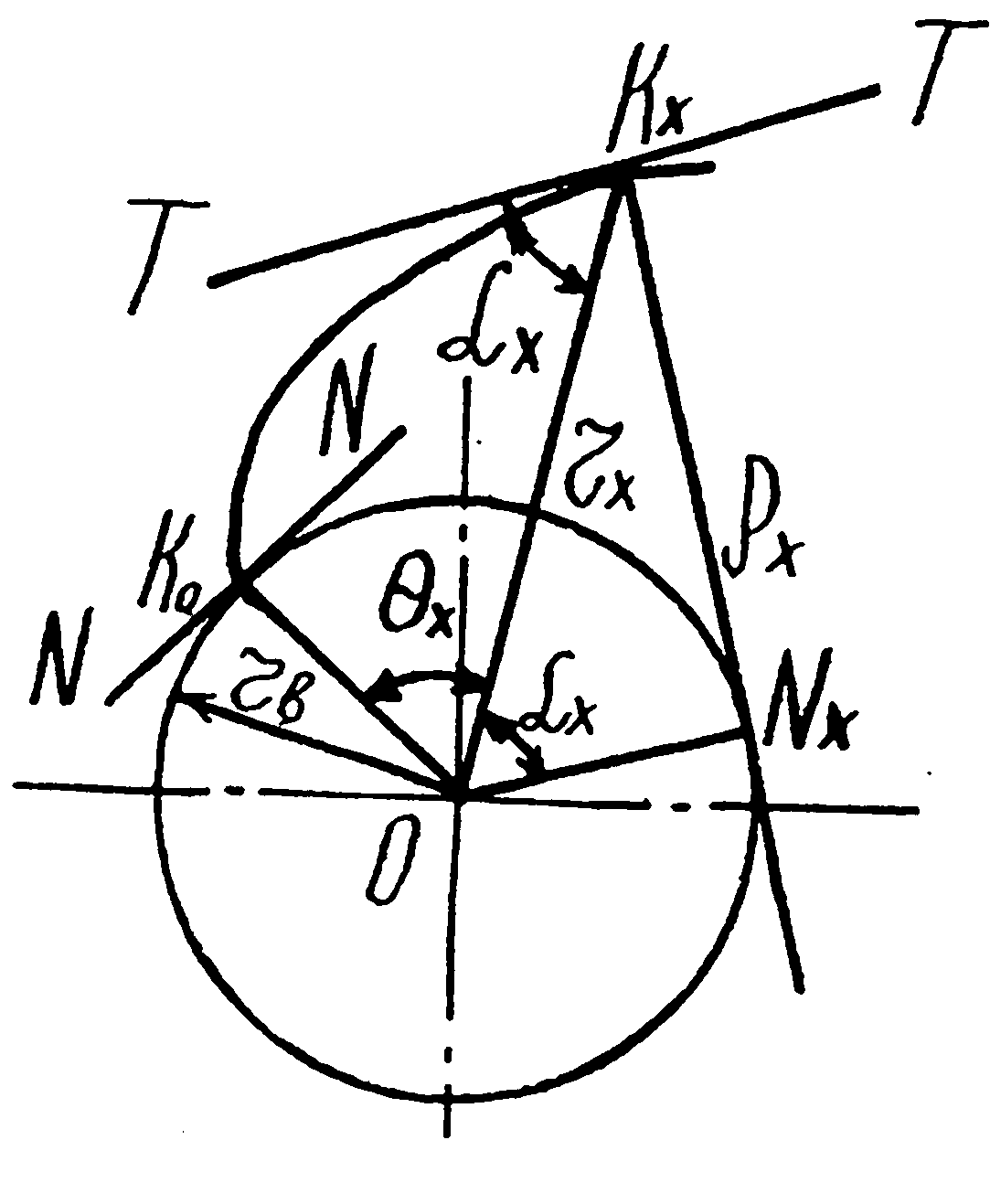
11.2 Евольвента кола та її властивості.
Евольвентою кола – називається крива, яку описує будь – яка точка прямої лінії, що котиться по колу без ковзання. Це коло називається основним, а пряма, що перекочується по колу твірною, або виробляючою прямою /рис. 11.3/.
Нехай пряма N-N котиться по основному колу радіуса rь без ковзання. Точка К описує евольвенту. Біжучий радіус – вектор точки Кх
е![]() вольвенти
позначимо rx.
Початковий радіус – вектор евольвенти
Oko=rb.
Гострий кут між дотичною до евольвенти
в точці Кх
і її радіусом – вектором Окх
позначимо αx.
Кут Ох
між початковим радіусом – вектором
евольвенти Око
і
її біжучим радіусом Окх,
називається евольвент ним кутом або
інволютою кута αx,
тобто /11.12/
вольвенти
позначимо rx.
Початковий радіус – вектор евольвенти
Oko=rb.
Гострий кут між дотичною до евольвенти
в точці Кх
і її радіусом – вектором Окх
позначимо αx.
Кут Ох
між початковим радіусом – вектором
евольвенти Око
і
її біжучим радіусом Окх,
називається евольвент ним кутом або
інволютою кута αx,
тобто /11.12/
 Евольвента
кола
Евольвента
кола
Рис.11.3
Б![]() удь
– яка точка евольвенти визначається
радіусом-вектора rx
і
евольвент ним кутом θх.
Оскільки пряма N-N
котиться по основному колу без ковзання,
то можна скласти рівність /11.13/
удь
– яка точка евольвенти визначається
радіусом-вектора rx
і
евольвент ним кутом θх.
Оскільки пряма N-N
котиться по основному колу без ковзання,
то можна скласти рівність /11.13/
Із прямокутного трикутника OkxNx маємо:
![]()
![]() /11.14/
/11.14/
Знайдемо дуги знайдемо:
![]() /11.15/ Підставимо
значення із /11.14/ і /11.15/ в /11.13/, отримаємо:
/11.15/ Підставимо
значення із /11.14/ і /11.15/ в /11.13/, отримаємо:
rb tgαx=rb(θx+αx). /11.16/ Розділимо обидві частини рівняння /11.16/ на rb, отримаємо:
θx+αx=tgαx, або
θx=tgαx-αx. /11.17/
Використавши позначення в рівнянні /11.12/, отримаємо
inVαx=tgαx-αx, або
Ox=tgαx-αx=inVαx. /11.18/
Зв’язок між rx і £x запишемо із трикутника KxONx
rx=![]() .
/11.19/
.
/11.19/
Рівняння /11.18/ і /11.19/ називаються параметричними рівняннями евольвенти.
Властивості евольвенти:
1/ евольвента – симетрична крива, яка має дві вітки, що збігаються у початковій точці Ко;
2/ будь – які дотичні NN до основного кола є нормалями до евольвенти у відповідних точках Кх;
3/ основне коло є геометричним місцем центрів кривизна евольвент описаних прямою NN, тобто їх еволютою, а значить вектор KxNx є радіусом кривизна евольвенти у точці Кх.