

21.4. Зведена маса і зведений динамічний момент інерції механізму.
Зведеною масою, /динамічним моментом інерції/ механізму, називається така умовна маса /динамічний момент інерції/, яка будучи зосередженою в точці зведення має кінетичну енергію, що дорівнює сумі кінетичних енергій всіх ланок механізму.
Отже, кінетична енергія зведеної маси тзв, зосередженої в точці А ланки зведення /рис.21.І/
![]()
або кінетична енергія зведеного динамічного моменту інерції Ізв.
![]()
має
дорівнювати
сумі
Tj
кінетичних
енергій
усіх
ланок
механізму,
тобто:
![]() або:
або:
 /21.16/
/21.16/
Звідки дістаємо:
 /21.17/
/21.17/
 /21.18/
/21.18/
У формулах /21.17/ і /21.18/ mj і Ij - це відповідно маса j - i ланки та її динамічний момент інерції відносно осі, що проходить через центр маси перпендикулярно площині руху, Vj - швидкість центра маси ланки; ωj - кутова швидкість ланки; VA - швидкість точки зведення А; ω1 - кутова швидкість ланки зведення.
Зведена маса і зведений момент інерції залежить тільки від співвідношення швидкостей, які в свою чергу залежать від положення ланок механізму, тобто від положення ланки зведення механізму, і будуть завжди величинами додатніми.
Знайдемо зведенний динамічний момент інерції кривошипно-повзунного механізму /рис,21.2,а/.
![]() /21.19/
/21.19/
Звідки маємо:
![]() /21.20/
/21.20/
Значення лінійних і кутових швидкостей виразимо через відповідні відрізки планів швидкостей. Відомо, що:
![]()
![]()
Тоді рівняння /21.20/ прийме вигляд:
![]() /21.21/
/21.21/
Лекція 22.
Регулювання руху механізмів та машин
План лекції:
22.1. Рівняння руху машини.
22.2. Нерівномірність руху механізмів.
22.3. Середня швидкість руху. Коефіцієнт нерівномірності руху.
22.1. Рівняння руху машини.
Виконавши зведення сил і мас, будь-який механізм з однією ступінню вільності /важільний, зубчастий, кулачковий і ін./ /рис.22.1,а/, яким би складним він не був і скільки б сил на нього не діяло, можна замінити динамічною моделлю /рис.22.1,б/.
Основою для складання рівняння руху механізму чи машини з однією ступінню вільності є теорема про зміну кінетичної енергії:
Т-То =ΣА,
де Т і То- кінетична енергія механізму відповідно в довільному і початковому положенні; ΣА - сума робіт всіх сил /рушійних і опору/.
Рівняння руху в формі рівняння кінетичної енергії буде мати вигляд:
![]() /22.1/
/22.1/
де
![]() і
і
![]() робота зведених
до
ланки
зведення
сил
рушійних
і
сил опору;
робота зведених
до
ланки
зведення
сил
рушійних
і
сил опору;
![]() ,
,
![]() і
V,
V0
- зведені
маси
і
швидкості
точки
зведення
відповідно в
довільному
і
початковому
положенні.
і
V,
V0
- зведені
маси
і
швидкості
точки
зведення
відповідно в
довільному
і
початковому
положенні.
Механізм стругального верстату
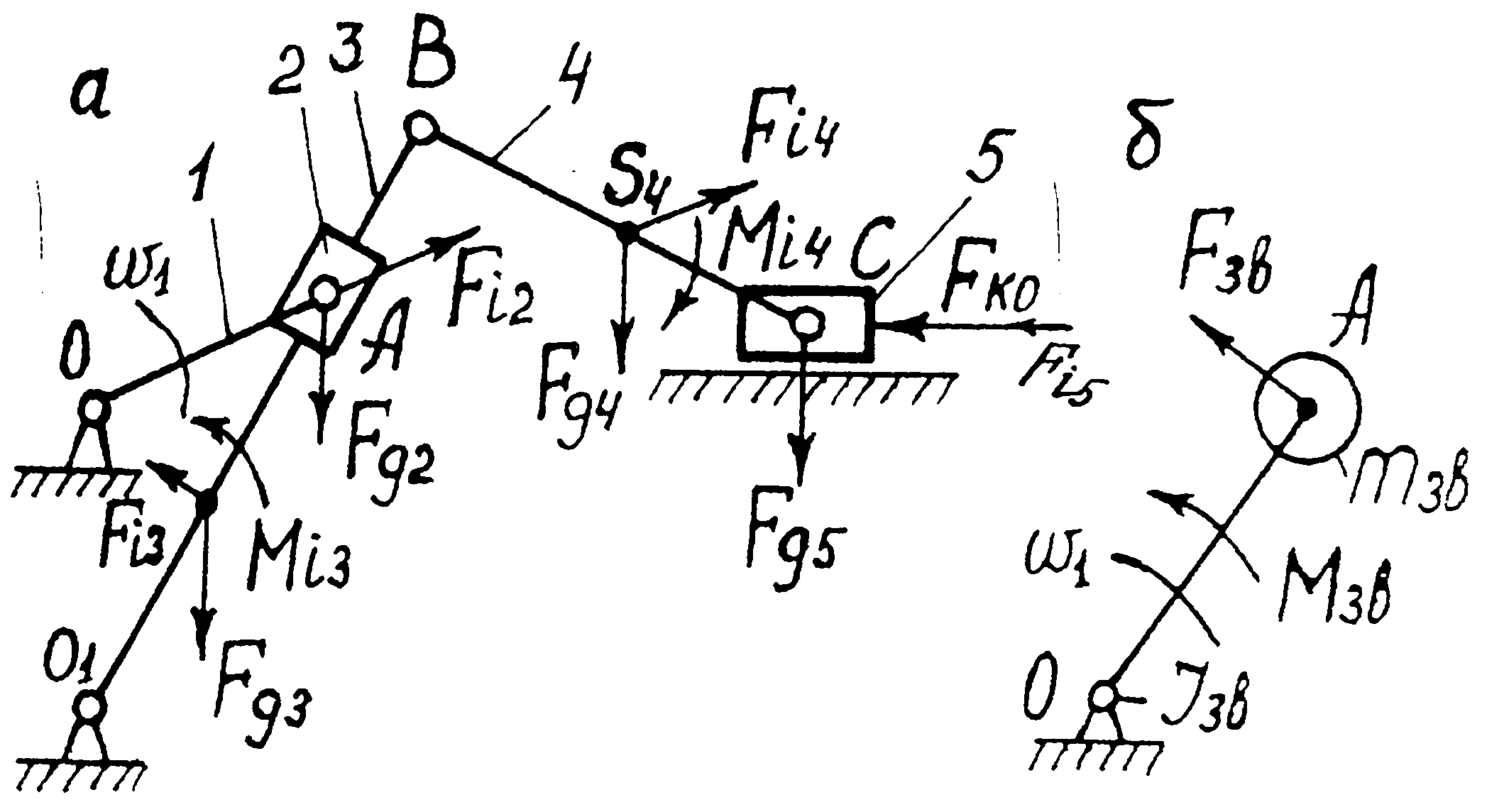
а - кінематична схема; б - динамічна модель
Рис.22.1.
Якщо ланка зведення здійснює обертальний рух навколо нерухомої осі, то рівняння руху прийме вигляд:
![]() /22.2/
/22.2/
де
![]() і
і
![]() - робота
зведених
до
ланки
зведення
моментів
рушійних
і опору;
- робота
зведених
до
ланки
зведення
моментів
рушійних
і опору;
![]() ,
,![]() і
і
![]() ,
,
![]() - зведені
динамічні
моменти
інерції
ланок і
кутова
швидкість
ланки
зведення
відповідно
в
довільному
і
початковому
положенні.
- зведені
динамічні
моменти
інерції
ланок і
кутова
швидкість
ланки
зведення
відповідно
в
довільному
і
початковому
положенні.
Порівняно простим методом складання рівнянь руху механізмів являється метод Лагранжових рівнянь. При складанні рівнянь Лагранжа другого роду вважаємо, що рух механізму досліджується в системі узагальнених координат, в якості яких прийняті незалежні параметри, які визначають положення механізму, наприклад, переміщення деяких точок ланок, або кути повороту ланок відносно нерухомих осей. Число рівнянь Лагранжа повинно дорівнювати числу ступенів вільності механізму.
Із курсу теоретичної механіки відомо, що рівняння Лагранжа другого роду має наступний вигляд:
![]() /22.3/
/22.3/
де
T-
кінетична
енергія
механізму;
![]() - узагальнена
координата;
- узагальнена
координата;
![]()
узагальнена
швидкість;
П-
потенціальна
енергія
системи;
![]() - узагальнена
сила,
яка
відповідає
узагальненій
координаті
.
- узагальнена
сила,
яка
відповідає
узагальненій
координаті
.
Замінимо механізм /рис.22.1,а/ еквівалентною схемою /рис.22.1,б/, тоді будемо мати:
![]()
або
![]()
Якщо
не
враховувати
сили
тяжіння
ланок
і
силу
пружності,
то
![]()
В цьому випадку рівняння Лагранжа приймає вигляд:
![]() /22.4/
/22.4/
Якщо механізм замінений еквівалентною схемою /рис.22.1,б/, то
маємо:
 /22.5/
/22.5/
Зведена маса від швидкості точки зведення не залежить, а тому:
 і
і
![]() /22.6/
/22.6/
Виконаємо перетворення:
![]() /22.7/
/22.7/
Крім
того,
![]() залежить
тільки
від
часу,
значить:
залежить
тільки
від
часу,
значить:
 /22.8/
/22.8/
Замінимо в рівнянні /22.5/ похідні їх значеннями із /22.6/-/22.8/, тоді остаточно отримаємо:
![]() /22.9/
/22.9/
У
випадку
заміни
механізму
еквівалентною
схемою,
яка
має
зведений
момент
інерції
і
кінетичну
енергію
![]() аналогічно
/22.9/ будемо
мати:
аналогічно
/22.9/ будемо
мати:
![]() /22.10/
/22.10/
Диференційні рівняння /22.9/ і /22.10/ називаються рівняннями руху машини. Кожна складова лівої частини рівняння /22.9/ має розмірність сили, а складові лівої частини рівняння /22.10/ - розмірність моменту.