

14.3. Підрізування зубів. Найменше число зубів на колесі.
Розглянемо можливий випадок, коли вершина зуба колеса вкорінюється в тіло шестерні. При цьому зуби колеса защемлятимуться в западинах шестерні що викличе посилений знос зубів або їхню поломку. Щоб запобігти заклинанню зубів, ніжку зуба шестерні треба підрізати. При нарізанні зубчастих коліс методом обкатування різальний інструмент і заготовку також можна розглядати як зубчасту передачу. Однак в процесі нарізання заклинювання не виникає тому, що інструмент зрізає частину профілю зуба, що йому мішає. В результаті отримуємо підріз зубів колеса /рис.14.3/
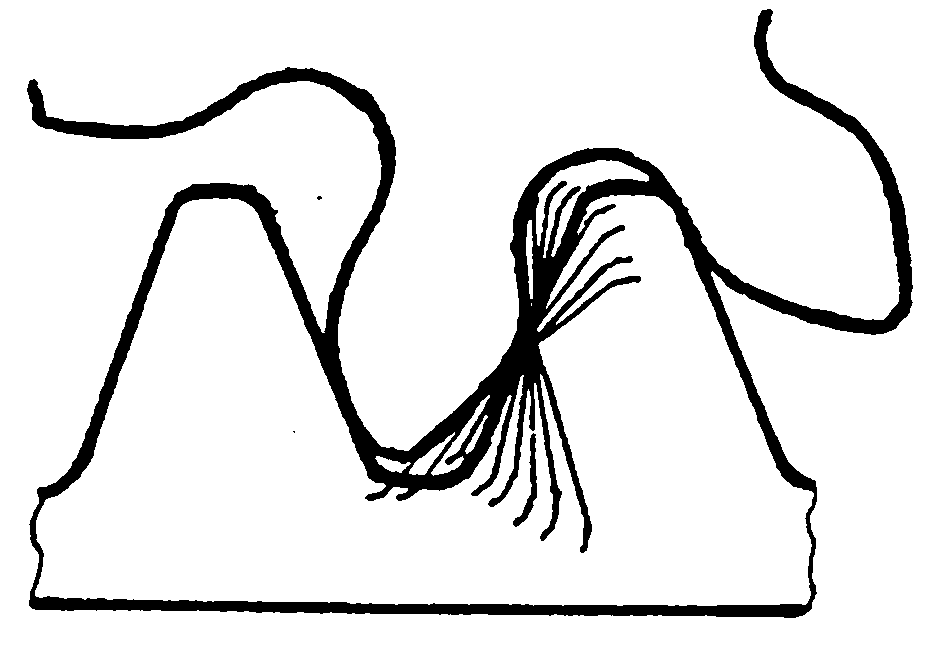 Підрізування
зубів
Підрізування
зубів
Рис 14.3
Підрізування зовсім не бажане тому, що при цьому видаляється деяка частина активного профілю зуба і це призводить до зменшення коефіцієнта і опору згину, а також збільшення питомих тисків отже, збільшення спрацювання зубів.
Питання про граничне число зубів, яке можна призначити для шестерні, дуже важливе, бо з цим зв’язана зміна габаритів усього механізму, а значить, і збільшення передаточних відношень.
Основною умовою, що обмежує можливість зменшення числа зубів на шестерні, є відсутність підрізування.
Визначимо найменше число зубів Zmin на меншому колесі, при якому відсутнє підрізування.
Для нормального зубчастого зачеплення, у якого кут зачеплення αw = 200 і коефіцієнт висоти зуба ha* = 1,0, найменше число зубів колеса /приведено без виводу/ Zmin = 17.
14.4 Виправлення /корегування/ зубчастих коліс.
Граничне мінімальне число зубів в нормальних евольвентних колесах /αw = 200 і ha* = 1,0/ Zmin = 17 надто велике. Це число можна зменшити, збільшивши кут зачеплення αw і зменшивши висоту головки зубця ha = 0,8m.
Для того, щоб передача була особливо компактною, можна відступити від норм стандарту і застосувати такі індивідуальні геометричні умови зачеплення, які дозволяли б здійснити передачу з мінімальними числами зубців і забезпечити при цьому нормальну роботу коліс.
Зубчасті колеса, що відхиляються від норми, мають загальну назву виправлених, або коригованих, зубчастих коліс.
Виправлені колеса широко застосовуються в сучасному машинобудуванні в усіх тих випадках, коли умова замінюваності коліс є неістотною і на перший план висовується умова компактності передачі. Таким чином, виправлені колеса – це парні колеса.
Нарізування зубчастих коліс методом обкатування дає можливість дуже просто замінювати окремі параметри зубчастого колеса і виготовляти не тільки нормальні, а й кореговані зубчасті колеса з іншими раціональнішими параметрами.
Для виготовлення таких коліс гребінка або вихідний контур черв’ячної фрези мають крок P = πm, однаковий на будь-який горизонтальній прямій. Профіль зубців прямолінійний з нахилом під кутом α = 200 /рис.14.4/.
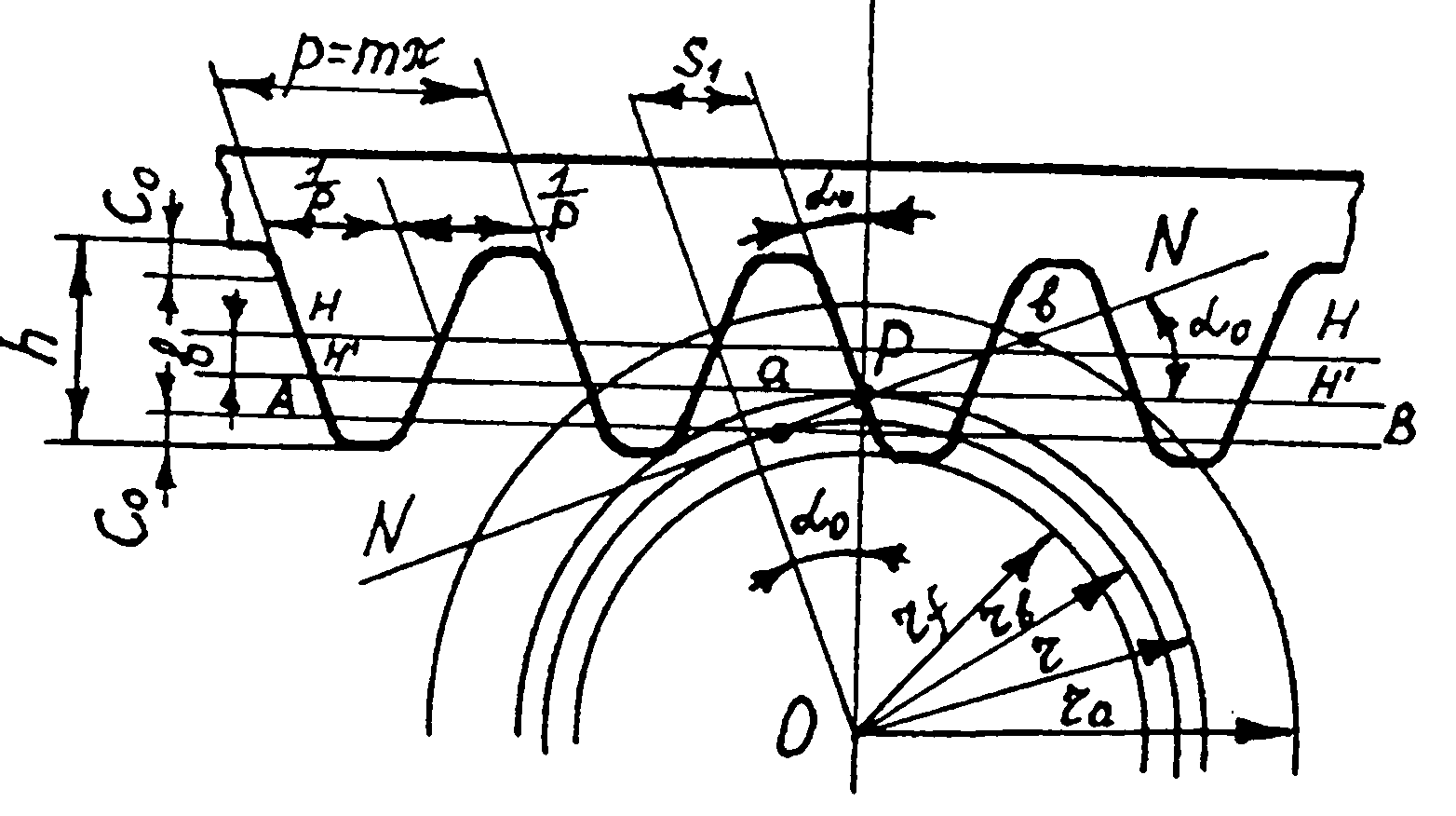 Вихідний
контур.
Вихідний
контур.
Рис.14.4
Якщо установити центр заготовки колеса відносно гребінки, так, щоб початкове коло заготовки дотикалось до середньої /модульної/ прямої гребінки, то в результаті гребінка наріже нормальне колесо із заданим числом зубів Z. Якщо ж, тепер, не змінюючи положення колеса, відвести гребінку або черв'ячну фрезу від нормального положення до центру заготовки /від'ємне зміщення/ або від центра /додатнє/ на деяку величину, то буде нарізано кориговане зубчасте колесо.
При зачепленні двох коригованих коліс між осьова віддаль у загальному випадку вже не дорівнюватиме між осьовій віддалі нормальних коліс. Тому ділильні кола, що правили за початкові при нарізуванні коліс, не дотикатимуться одне до одного і, отже не будуть початковими колами при з'єднуванні цих коліс.