

МИРОНОВ В.В.
СУДОВЫЕ АВТОМАТИЗИРОВАННЫЕ ЭЛЕКТРОПРИВОДЫ
Конспект лекций для курсантов высших морских учебных заведений
Миронов В.В. Судовые автоматизированные электрические приводы: конспект лекций для высших морских учебных заведений. Херсон. 2007. – 612 с.
Приведены основные сведения о судовых автоматизированных электроприводах.
Особое внимание уделяется системам управления судовыми автоматизированными электроприводами, а также устройству, принципу действия и особенностям эксплуатации
электрифицированных судовых технических средств.
Конспект содержит таблицы с техническими характеристиками электрических аппа
ратов и примеры расчета и выбора этих аппаратов.
Для курсантов высших морских учебных заведений. Может бать полезен судовым электрикам и электромеханикам.
Рецензенты:
В.В. Шевченко, д.т.н., профессор Национального университета кораблестроения
Г.Г. Драгомарецкий, судовой электромеханик 1-го разряда
ПРЕДИСЛОВИЕ
Конспект лекций составлен в соответствии с учебной программой дисциплины
„Судовые автоматизированные электроприводы” для специальности 6.092200 «Электри
ческие системы и комплексы транспортных средств» морских высших учебных заведений 3-го уровня аккредитации.
В конспекте рассмотрены вопросы эффективного использования и технического обслуживания систем электроприводов, широко распостраненных на современных судах транспортного флота.
Необходимое внимание уделено рассмотрению физической сущности явлений про-
цесса эксплуатации, типовым конструктивным решениям, нагрузочным диаграммах рабо-
чих механизмов и механическим характеристикам электроприводов.
Порядок изложения учебного материала облегчает усвоение курса и наиболее пол-
но отвечает современному состоянию и тенденциям развития электрооборудования судов.
Значительное место в конспекте лекций отведено практическим вопросам, связан-
ным со специфическими условиями работы судового электрооборудования, его техниче-
ского использования и обслуживания.
При составлении конспекта лекций были использованы международные и нацио-
нальные морские нормативные документы, в том числе:
1. Международная конвенция по подготовке моряков и несению вахты (STCW-78);
2. Международный кодекс по подготовке моряков и несению вахты ( CODE-95 );
3. Правила классификации и постройки морских судов ( Правила Регистра );
4. Правила технической эксплуатации морских и речных судов Украины. Раздел
«Электрооборудование», КНДЗ 31.2.002.07-96;
5. Международная Конвенция по охране человеческой жизни на море ( SOLAS-74);
6. Правила предотвращения загрязнения с судов ( МАРПОЛ-73/78 ).
В конспекте использован справочный материал, который должен помочь студентам при расчете и выборе различных видов судового электрооборудования из справочников и каталогов.
В конспект включены контрольные вопросы, имеющие целью сосредоточить вни-
мание студентов на наиболее важные особенности изучаемой темы.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
АБЛ – автоматические буксирные лебедки
АВ – автоматический выключатель
АД – асинхронный двигатель
АР – автоматический рулевой
АСУ – автоматическая система управления
АШЛ – автоматическая швартовная лебедка
БУ – блок управления
ВМХ – вахтенный механик на морских судах, вахтенный помощник механика на речных судах или лица, их заменяющие
ВП – вахтенный помощник капитана или лицо, его заменяющее
ВРШ – винт регулируемого шага
ВФШ – винт фиксированного шага
ВЭМ – вахтенный электромеханик на морских судах, вахтенный помощник электро
механика на речных судах
Г – Д – генератор-двигатель
ГПМ – грузоподъемные механизмы
ДУ – дифференцирующее устройство
ИД – исполнительный двигатель
ИМ – исполнительный механизм
ИУ – интегрирующее устройство
КОС – коэффициент обратной связи
М – машина электрическая
МХЗ – механик на морских судах, помощник механика на речных судах, в заведова
нии которых находятся соответствующие СТС
НД – нормативный документ
ПД – приводной двигатель
ПТБ – правила техники безопасности
ПТЭ – правила технической эксплуатации
ПУ – пост управления
ПСУ – пульт следящего управления
СТ – старший помощник капитана на морских судах, первый штурман ( старший помощник капитана, первый помощник капитана ) на речных судах
СТМ – старший ( главный ) механик на морских судах, механик на речных судах
СТС – судовые технические средства
ТИ – техническое использование
ТО – техническое обслуживание
ТПЧ – тиристорный преобразователь частоты
РУ – рулевое устройство
РЭГ – рулевой электрогидравлический ( привод )
РЭМ – рулевой электромеханический ( привод )
РЭП – рулевой электропривод
ЭМХ – старший механик на электроходах и приравненное к ним судах, на осталь-
ных судах – первый электромеханик, электромеханик или лицо, его заменяющее
ЭО – электрооборудование
ЭП – электропривод
ЭСА – электрические и электронные средства автоматизации
ЯШУ – якорно-швартовное устройство
ВВЕДЕНИЕ
Термины и определения
В науке, технике и производстве в области электропривода применяют следующие
термины и определения понятий ( ГОСТ 16593-79 ).
Электрическим приводом называется электромеханическая система, предназначен-
ная для приведения в движение механизма и управления этим движением.
К судовым механизмам относятся:
1. вспомогательные – насосы, вентиляторы, компрессоры;
2. рулевые;
3. грузоподъемные – лебедки, краны, тельферы;
4. якорно-швартовные – брашпили, шпили, автоматические швартовные лебедки;
5. специальные – подруливающие, кренования, успокоители качки, откренивающие ( суда типа ро-ро ), автоматические буксирные лебедки ( АБЛ ).
Под управлением движением механизма понимают выполнение таких функций:
1. пуск и остановку;
2. регулирование скорости;
3. реверсирование;
4. электрическое торможение;
5. защиту электродвигателя, например, от токов короткого замыкания, токов пере-
грузки и т.п.
Управление простейшими судовыми электроприводами, например, вентиляторами, сводится к пуску, остановке и защите.
В то же время в более сложных электроприводах, например, грузоподъемных меха
низмах, управление предусматривает выполнение всех 5 функций.
В общем случае электропривод состоит из 4-х устройств ( рис.В.1 ):
преобразовательное;
электродвигательное;
передаточное;
управляющее.
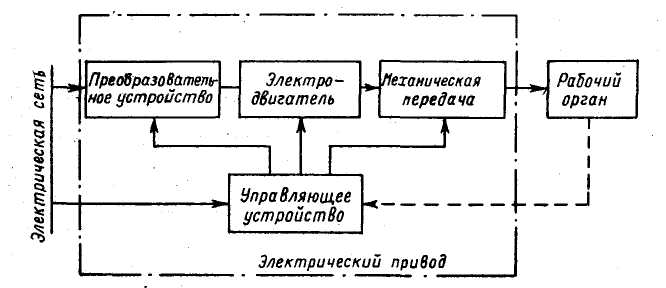
Рис. В.1. Структурная схема электропривода
Преобразовательное устройство – это электротехническое устройство, включае-
мое между питающей сетью и электрической частью электропривода и предназначенное для преобразования рода тока, напряжения и частоты тока.
На современных судах в качестве преобразовательных устройств чаще всего используются статические ( не вращающиеся ) преобразователи:
для преобразования рода тока – выпрямители, преобразующие переменный ток в постоянный;
для преобразования напряжения – трансформаторы, преобразующие перемен-
ное напряжение одного значения в переменное напряжение другого значения той же часто
ты;
для преобразования частоты тока – преобразователи частоты, преобразующие переменный ток одной частоты в переменный ток другой частоты.
Рассмотрим поочередно эти преобразовательные устройства.
Выпрямители
На судах выпрямители применяют для питания электроприводов с двигателями постоянного тока. К таким электроприводам относятся:
якорно-швартовные – брашпили и шпили;
грузоподъёмные – грузовые лебёдки и краны;
гребные электрические установки, предназначенные для движения судна.
Мощность этих электродвигателей составляет десятки и сотни кВт.
Трансформаторы
В судовых электроприводах трансформаторы применяются:
1. в цепях управления;
2. в установках двойного рода тока;
3. в тиристорных преобразователях частоты;
4. в гребных электрических установках;
5. с специализированных ЭП большой мощности ( плавучие буровые вышки и т.п. )
Мощность трансформаторов цепей управления составляет от нескольких сот ВА
до нескольких кВА .
В установках двойного рода тока переменное напряжение напряжение судовой се-
ти преобразуется при помощи трансформаторно-выпрямительного блока в напряжение по
стоянного тока и далее подается на исполнительный электродвигатель постоянного тока, например, электродвигатель якорно-швартовного устройства.
В этих установках мощность трансформаторов составляет от десятков до сотен кВ*А .
В тиристорных преобразователях частоты мощность трансформаторов составляет от десятков до сотен кВА .
Наиболее мощные судовые трансформаторы применяются в гребных электриче-
ских установках и на специализированных судах. Их мощность составляет от тысяч до десятков тысяч кВА.
Преобразователи частоты
На судах статические тиристорные преобразователи частоты применяются в элек-
троприводах переменного тока. К таким электроприводам относятся, в основном, грузо-
подъёмные тяжеловесные устройства и гребные электрические установки.
Частоту на выходе таких преобразователей можно регулировать в пределах от 0 до 50 Гц.
Электродвигательное устройство предназначено для преобразования электриче-
ской энергии в механическую или, в некоторых системах судовых электроприводов ( си
стема генератор – двигатель ), механической энергии в электрическую.
К электродвигательным устройствам относят электродвигатели постоянного и пере
менного тока, а также универсальные ( переменно-постоянного тока ). Последние нашли на судах ограниченное применение, в основном, в электроприводах мощностью до 250…300 Вт.
Передаточное устройство предназначено для передачи механической энергии от электродвигателя к исполнительному органу механизма.
К передаточным устройствам относят механические , гидравлические и другие передачи. Передаточные устройства применяют в грузоподъёмных, якорно-швартовных
и рулевых механизмах
Например, в электроприводе грузовой лебёдки передаточным устройством являет
ся редуктор, расположенный между электродвигателем и грузовым барабаном лебёдки.
В электроприводе поршневого компрессора передаточным устройством является кривошипно-шатунный механизм, который преобразует вращательное движение вала электродвигателя в поступательное движение поршня компрессора. В паровозах этот же механизм работает наоборот – преобразует поступательное движение поршней в цилинд-
рах паровых машин во вращательное движение колес паровоза.
Простейшие по устройству электроприводы, например, вентиляторы и центро-
бежные насосы, не имеют передаточного устройства, т.к. у них крыльчатка насажена непосредственно на вал электродвигателя.
Управляющее устройство предназначено для управления преобразовательным
электродвигательным и передаточным устройствами.
При помощи управляющего устройства задают необходимый режим работы всего электропривода, например, пуск, остановку, реверс, изменение скорости и др.
Например, в электроприводе грузовой лебёдки управляющее устройство состоит из командоконтроллера ( с рукояткой управления ) и станции управления, внутри корпуса которой находятся коммутационные и защитные электрические аппараты – контакторы, реле, предохранители и др.
В сложных современных судовых электроприводах составной частью управляю-
щего устройства являются бортовые компьютеры, которые получают информацию от задатчиков и датчиков обратной связи и вырабатывают сигналы управления в соответ-
ствии с заданными алгоритмами ( программами ).
При этом, в качестве задатчиков используются рукоятки управления тремя меха-
низмами крана ( подъём, поворот, стрела ), связанные с потенциометрами, в качестве дат-
чиков – большое количество чувствительных элементов, измеряющих вес груза, давление в системе гидравлики, силу тока, определяющих положение рабочих органов перечислен-
ных механизмов и многое другое.
Рабочим органом называется часть механизма, предназначенная для непосред-
ственного выполнения полезной работы. Например, рабочим органом являетя: у рулевых
электроприводов – перо руля, при повороте которого судно изменяет курс, у центробеж-
ных насосв – крыльчатка, при вращении которой перемещается жидкость, у поршневых насосов – поршень, при движении которого также пермщается жидксть, у поршневого компрессора – поршень, при движении которого происходит сжатие газа, у лебедки – грузовой барабан, при вращении которого перемещается груз, у якорно-швартовных устройств – швартовных и якорный барабаны, при вращении которых перемещаются соответственно швартовный канат или якорь с якорь-цепью и т.п.