

4.8.2. Способ эквивалентной замены
На рис. 4.18а приведена схема нивелирных ходов с тремя узловыми точками А, В и С и двумя исходными реперами Р1 и Р2. В кружках на схеме отмечены секции нивелирных линий, указаны номера превышений и длин линий в соответствующих секциях. Значения превышений указаны в миллиметрах в соответствии с направлением движения, длины линий даны в км, высоты исходных реперов – в метрах.
1. В трех замкнутых ходах (1), (2), (3) и одном разомкнутом ходе (4), например, от Р1 через т. А на Р2, определить невязки в превышениях:
W(1) = +4264 + 1205 – 1652 – 3802 = + 15 мм;
W(2) = - 2074 – 1205 + 3287 = + 8 мм;
W(3) = + 1652 + 2074 – 3732 = - 6 мм;
W(4) = + 4264 + 3287 – (83786 – 76248) = + 13 мм.
2. Вычислить измеренные значения высот узловых точек А и С.
Высоты точек определим дважды: т. А – по ходам (1) и (5); т. С – по ходам (2) и (7). Результаты вычислений следует заносить в последователь-ности расчетов в ведомость уравнивания (табл. 4.71). Запись в таблице сравнительно сложная, поэтому внимательно посмотрите по приведенному примеру последовательность занесения в нее исходных и получаемых в расчетах величин.
![]()
![]()
![]()
![]()
3. Определить веса ходов (1), (2), (5) и (7) по формуле
![]() ,
(4.232)
,
(4.232)
где s – длина хода; С – единица веса (для данных примера принято С = 2 км).
![]()
![]()
![]()
![]()
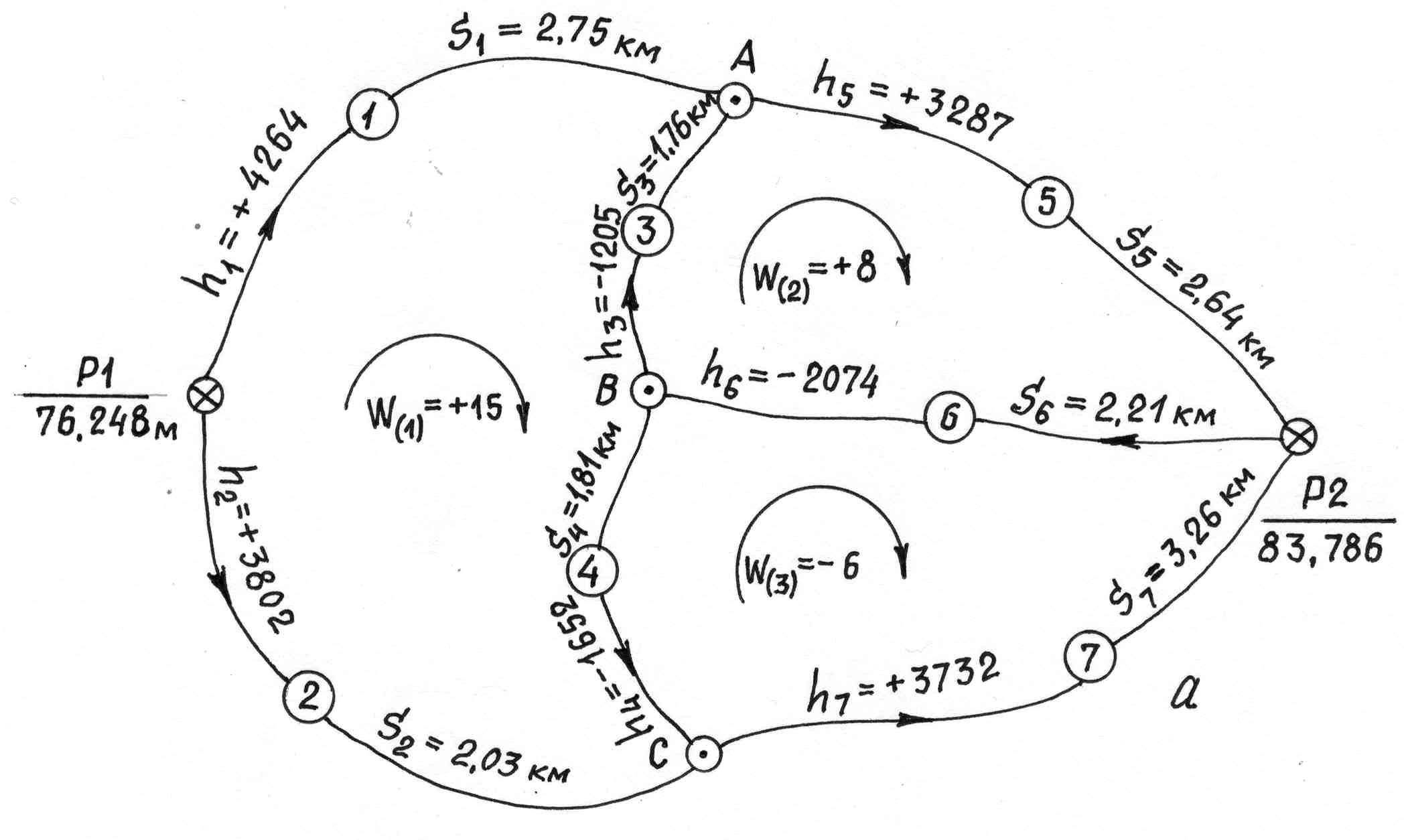
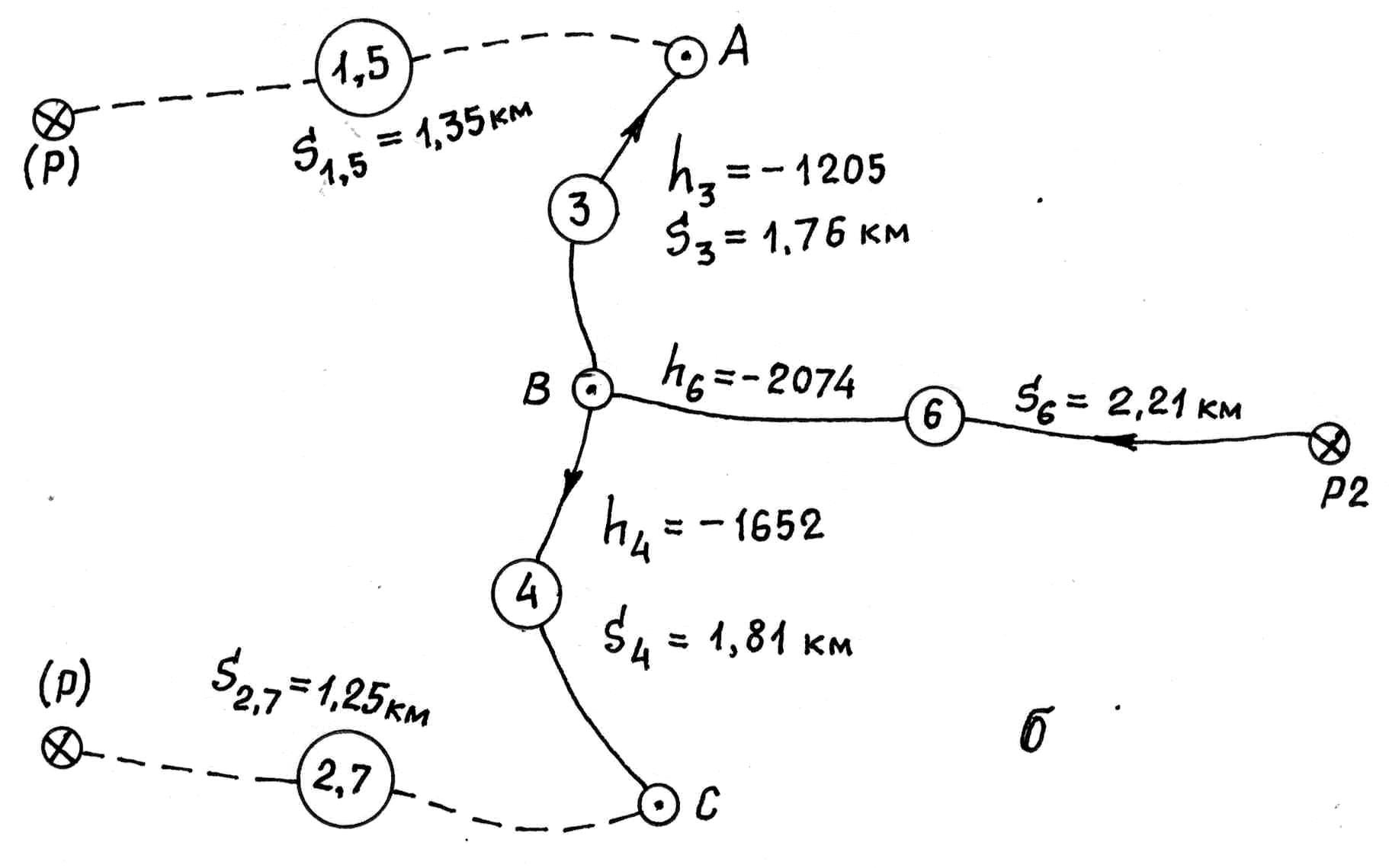
Рис. 4.18. Уравнивание нивелирных ходов способом эквивалентной замены
а) схема нивелирных ходов; б) эквивалентная схема
Таблица 4.71
Ход |
Номер исход-ного пункта и его высота, м |
Измерен- ное превы-шение, h , мм |
Длина хода Si , км |
Вычисленная высота узловой точки, м |
Вес Pi = 2/si |
Уравненное значение высоты узловой точки, м |
Поправка νi, мм |
|
|
|
|
Точка А |
|
80,5048 |
|
1 |
Р1 |
+4264 |
2,75 |
80,5120 |
0,727 |
|
-7,2 |
5 |
76,248 |
-3287 |
2,64 |
80,4990 |
0,758 |
|
+5,8 |
|
|
|
|
(80,5054) |
|
|
|
(1,5) |
Р2 |
|
(1,35) |
|
1,485 |
|
-0,6 |
3 |
83,786 |
+1205 |
1,76 |
|
1,136 |
|
-0,8 |
|
|
|
|
Точка С |
|
80,0537 |
|
2 |
Р1 |
+3802 |
2,03 |
80,0500 |
0,985 |
|
+3,7 |
7 |
Р2 |
-3732 |
3,26 |
80,0540 |
0,614 |
|
-0,3 |
|
|
|
|
(80,0515) |
|
|
|
(2,7) |
|
|
(1,25) |
|
1,599 |
|
+2,2 |
4 |
|
+1652 |
1,81 |
|
1,105 |
|
+3,3 |
|
|
|
|
Точка В |
|
81,7090 |
|
(1,5)+3 |
А |
+1205 |
3,11 |
81,7104 |
0,643 |
|
-1,4 |
(2,7)+4 |
С |
+1652 |
3,06 |
81,7035 |
0,654 |
|
+5,5 |
6 |
Р2 |
-2074 |
2,21 |
81,7120 |
0,905 |
|
-3,0 |
|
|
|
|
|
2,202 |
|
|
4. Вычислить предварительные значения высот т. А и т. С как среднее весовое полученных в п. 2 значений с учетом весов каждого хода:
![]()
![]()
5. Заменить систему одиночных ходов к точкам А и С от реперов Р1 и Р2 одним ходом: (1) + (5) → (1,5); (2) + (7) → (2,7) – рис. 4.18б. Ходы (1,5) и (2,7) называются эквивалентными (очевидно, что не друг другу, а преобразованным первоначальным ходам).
В результате произведенной замены система нивелирных ходов существенно упростится и будет представлять собой систему нивелирных ходов с одной узловой точкой В.
Веса полученных ходов будут равны суммам весов, составляющих ход:
![]()
![]()
Длины эквивалентных ходов определятся как отношение единицы веса к весу эквивалентного хода:
![]() км
;
км
;
![]() км
км
Под характеристиками ходов (1,5) и (2,7) в таблицу заносим характеристики ходов (3) и (4) от эквивалентных ходов к узловой точке В.
6. Трижды вычислим предварительное значение высоты узловой точки В по сложным ходам [(1,5) + (3)] и [(2,7) + (4)] и простому ходу (6) от репера Р2:
-
по ходу [(1,5) + (3)]:
![]()
-
по ходу [(2,7) + (4)]:
![]()
-
по ходу (6):
![]()
7. Вычислить характеристики сложных ходов:
-
длины ходов:
![]()
![]()
-
веса ходов:
![]()
![]()
8. Определить окончательное уравненное значение высоты узловой точки В с учетом веса ходов, по которым были получены предварительные высоты этой точки (см. шаг 6):

9. Вычислить поправки по ходам [(1,5)+(3)], [(2,7)+(4)] и (6) по формуле
![]() :
(4.233)
:
(4.233)
![]()
![]()
![]()
Поправки в составляющие ходы находят в весовом отношении к длинам ходов:
![]()
![]()
![]()
![]()
10. Определить окончательные уравненные значения высот узловых точек А и С.
Для этого к их предварительным значениям необходимо прибавить полученные по соответствующим ходам поправки:
![]()
![]()
11. Определить поправки по ходам (1), (5), (2), (7).
Величины поправок по ходам (1) и (5) получаются как разность между уравненным значением высоты узловой точки А и ее высотами, полученными по соответствующим ходам:
![]()
![]()
Аналогично для ходов (2) и (7) через узловую точку С:
![]()
![]()
12. Выполнить контроль уравнивания по формуле
![]() (4.234)
(4.234)
по каждому из замкнутых полигонов и разомкнутому ходу. Для этого занесем на схему нивелирных ходов значения полученных поправок. Знак поправки на схеме устанавливают в соответствии с направлением движения.
![]()
![]()
![]()
![]()