

4.6.7.Уравнивание триангуляции по условию координат
Как известно, в триангуляции измеряют только горизонтальные углы в цепочке геодезических фигур. При этом ряд геодезических фигур, например, треугольников, на концах имеют базисные стороны, либо, как в рассматриваемом ниже примере, на другом конце имеют исходный пункт 5 (рис. 4.13).
В табл. 4.37 и 4.38 приведены значения координат исходных пунктов и значения измеренных горизонтальных углов.
Выполним предварительные вычисления в триангуляции.
Из решения обратной геодезической задачи найдем значение дирекционного угла исходной стороны 1-2 и расстояние s:
![]()
![]() ;
;
![]()
По теореме синусов найдем длины сторон ходовой линии 2-1-3-4-5:
![]() ;
;
![]() ;
;
![]()
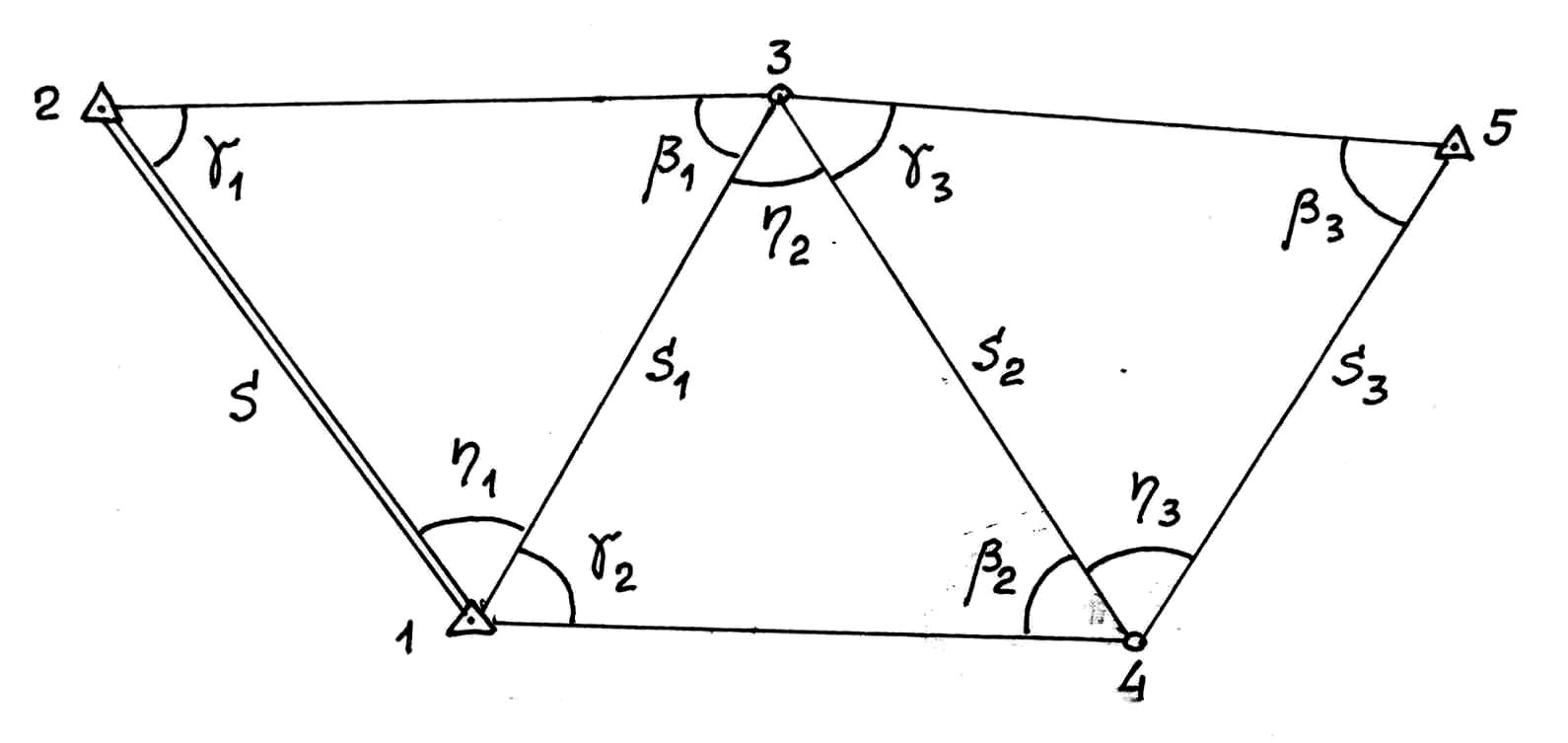
Рис. 4.13. Ряд триангуляции. Уравнивание по условию координат.
Таблица 4.37
Координаты исходных пунктов
-
№№ пунктов
1
2
5
Х, м
3387,324
7088,605
4359,096
Y, м
4315,770
3245,309
13698,519
Таблица 4.38
Значения измеренных горизонтальных углов
-
γi
Значение угла
βi
Значение угла
ηi
Значение
угла
γ1
63° 17' 12,4"
β1
54° 53' 45,6"
η1
61° 49' 05,6"
γ2
69° 05' 49,6"
β2
47° 38' 49,3"
η2
63° 15' 18,8"
γ3
55° 16' 40,1"
β3
50° 12' 47,4"
η3
74° 30' 27,7"
Таблица 4.39
Предварительные вычисления в триангуляции
№№ точек |
Гориз.углы
|
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№№ точек |
||
Δх |
Δу |
Х |
Y |
|||||
2 |
|
|
|
|
|
|
|
|
163°52'09,9" |
|
|
|
|||||
1 |
61°49'05,6"
|
3387,324 |
4315,770 |
1 |
||||
45°41'15,5" |
4206,934 |
+2938,837 |
+3010,238 |
|||||
3 |
63°15'18,8"
|
6326,161 |
7326,008 |
3О |
||||
162°25'56,7" |
5318,018 |
-5069,994 |
+1605,140 |
|||||
4 |
74°30'27,7"
|
1256,167 |
8931,148 |
4О |
||||
56°56'24,4" |
5688,222 |
+3103,012 |
+4767,304 |
|||||
5 |
|
4359,179 |
13698,452 |
5О |
||||
|
|
|
|
|||||
Значения дирекционных углов определим в таблице вычисления координат по значениям правых или левых по ходу горизонтальных углов ηi и дирекционного угла исходного направления 2-1 (табл. 4.39).
Далее, так же, как и в предыдущем примере, не будем по тексту отмечать шаги решения задачи уравнивания углов, но практически сохраним стандартную последовательность действий.
Составим уравнения для условия фигур и условия координат.
1.![]()
2.
![]()
3.
![]() (4.176)
(4.176)
4.
![]()
5.
![]()
Приведем уравнения (4.176) к линейному виду и запишем условные уравнения поправок:
1.
![]()
2.
![]() (4.177)
(4.177)
3.
![]()
4.
![]()
5.
![]()
В
уравнениях (4.177):
![]() - поправки в соответствующие измеренные
углы; W(i)
– угловые невязки в треугольниках (1),
(2) и (3) по их счету от базовой линии; xno
и yno
– вычисленные координаты конечной
точки ходовой линии (в примере –
вычисленные координаты точки 5);
xio
и yio
– текущие координаты точек ходовой
линии.
- поправки в соответствующие измеренные
углы; W(i)
– угловые невязки в треугольниках (1),
(2) и (3) по их счету от базовой линии; xno
и yno
– вычисленные координаты конечной
точки ходовой линии (в примере –
вычисленные координаты точки 5);
xio
и yio
– текущие координаты точек ходовой
линии.
Поправку
![]() записывают в уравнениях 4 и 5 со знаком
плюс, если угол
ηi
является левым по ходу, и со знаком
минус, если этот угол – правый по ходу.
записывают в уравнениях 4 и 5 со знаком
плюс, если угол
ηi
является левым по ходу, и со знаком
минус, если этот угол – правый по ходу.
В уравнениях (4.177) значения разностей координат следует брать в километрах, невязки Wx и Wy – в дециметрах, а угловые невязки и поправки в углы – в секундах.
Таблица 4.40
Ведомость котангенсов измеренных углов и разностей координат
-
Направление
(x5o - xio), км
(y5 o - yio), км
5 – 1
+0,972
+9,383
5 – 3
-1,967
+6,372
5 - 4
+3,103
+4,767
βi
Котангенс
γ i
Котангенс
β1
0,70292
γ 1
0,50324
β2
0,91162
γ 2
0,38192
β3
0,83278
γ 3
0,69301
Найдем свободные члены уравнений поправок (т.е.невязки):
![]()
![]()
![]()
![]()
![]()
Составим таблицу значений разностей координат (в км) и котангенсов углов (табл. 4.40).
Приведем уравнения поправок (4.177) в развернутом виде:
1.
2.
3. (4.178)

С учетом значений, приведенных в табл. 4.40, запишем окончательные уравнения поправок:
1.
![]()
2.
![]()
3.
![]() (4.179)
(4.179)
![]()
![]()
Составим матрицу коэффициентов уравнений поправок с учетом того, что измерения углов выполнены равноточно с весами, равными единице.
Таблица 4.41
Матрица коэффициентов уравнений поправок
|
1(νγ1) |
2(νγ2) |
3(νγ3) |
4(νβ1) |
5(νβ2) |
6(νβ3) |
7(νη1) |
8(νη2) |
9(νη3) |
1(k1) |
1 |
|
|
1 |
|
|
1 |
|
|
2(k2) |
|
1 |
|
|
1 |
|
|
1 |
|
3(k3) |
|
|
1 |
|
|
1 |
|
|
1 |
4(k4) |
0,0237 |
-0,0364 |
0,1043 |
-0,0331 |
0,0869 |
-0,1253 |
-0,4549 |
0,3089 |
-0,2311 |
5(k5) |
0,2289 |
0,1180 |
0,1602 |
-0,3192 |
-0,2816 |
-0,1925 |
0,0471 |
0,0954 |
0,1504 |
Составим и решим систему нормальных уравнений коррелат, пользуясь данными табл. 4.41.
1. 3k1 – 0,4643 k4 – 0,0432 k5 + 3,6 = 0;
2. 3 k2 + 0,3594 k4 – 0,0682 k5 – 2,3 = 0;
3. 3 k3 – 0,2521 k4 + 0,1181 k5 – 4,8 = 0;
4. – 0,4643 k1 + 0,3594 k2 – 0,2521 k3 + 0,3929 k4 + 0,0013 k5 + 0,83 = 0;
5. – 0,0432 k1 – 0,0682 k2 + 0,1181 k3 + 0,0013 k4 + 0,3442 k5 – 0,67 = 0.
Из решения полученной системы уравнений: k1 = -1,9481; k2 = +1,4004; k3 = +1,1176; k4 = -4,9860; k5 = +1,6149.
Вычисляем поправки в измеренные углы, пользуясь данными табл. 4.41:
![]()
![]() (4.180)
(4.180)
![]()
Подстановка полученных значений поправок (4.180) в уравнения (4.178) показывает выполнение указанных условий.
После вычисления уравненных значений углов выполняют проверку уравнивания подстановкой их значений в уравнения 1, 2 и 3 (4.176).
Предоставляем читателю возможность завершения процесса уравнивания.