

4.6.8. Уравнивание линейно-угловой сети
Линейно-угловая сеть представлена на рис. 4.14. В этой сети, имеющей базис АВ, измерены направления и расстояния (табл. 4.42). Для решения задачи уравнивания координат точек линейно-угловой сети коррелатным способом вычислены значения горизонтальных углов.
Координаты пунктов А и В: xA = 5343,664 м; yA = 3981,857 м; xB = 6476,326 м; yB = 4649,235 м.
Дирекционный угол направления ВА: αВА = 210°30'25,6".
Точность измерения горизонтальных углов составила mβ = 5,0". Расстояния измерены с относительной погрешностью 1 : 40000.
Выполним предварительные вычисления в линейно-угловой сети.
Определим веса измеренных величин (расстояний) с учетом формулы (3.4) – табл. 4.43.
Определим координаты точек 1 и 2 дважды по ходам (1) [В-А-2-1-В-А] и (2) [В-А-1-2-В-А] (см. табл. 4.44).
Составим условные уравнения и уравнения поправок.
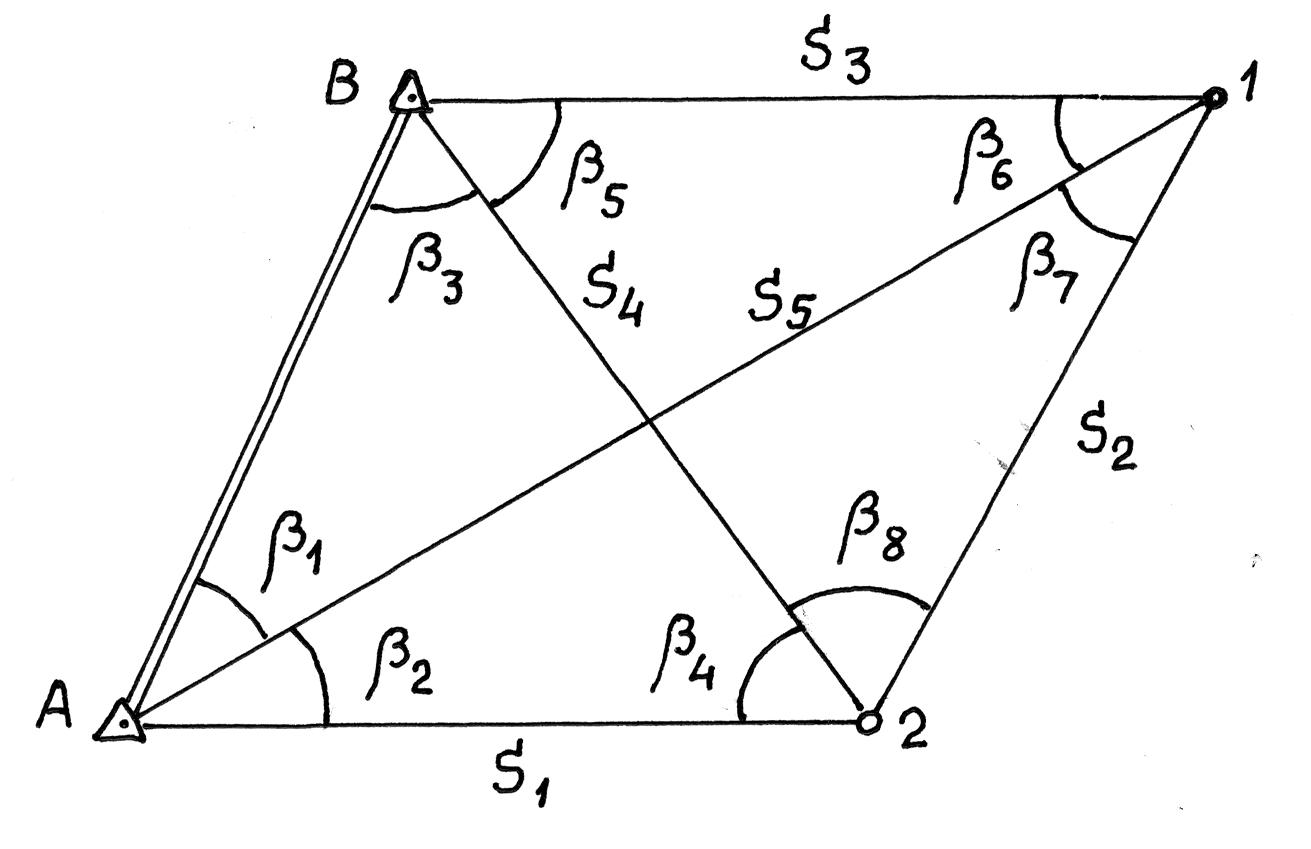
Рис. 4.14. Линейно-угловая сеть.
Таблица 4.42
Результаты измерений в линейно-угловой сети
Пункт |
Направление |
Значение измеренного направления |
Значение вычисленного угла |
Значение измеренного расстояния, м |
А |
А – В |
0° 00' 00,0" |
|
|
А – 1 |
42° 45' 02,6" |
β 1 = 42° 45' 02,6" |
S5 = 2218,342 |
|
А – 2 |
67°58' 17,7" |
β 2 = 25° 13' 15,1" |
S1 = 1632,301 |
|
В |
В – 1 |
0° 00' 00,0" |
|
S3 = 1538,317 |
В – 2 |
36° 41' 22,3" |
β 5 = 36° 41' 22,3" |
S4 = 1668,220 |
|
|
В – А |
101° 47' 13,6" |
β 3 = 65° 05' 51,3" |
|
1 |
1 – 2 |
0° 00' 00,0" |
|
S2 = 1016,748 |
1 – А |
43° 09' 48,8" |
β 7 = 43° 09' 48,8" |
|
|
1 – В |
78° 37' 27,2" |
β 6 = 35° 27' 38,4" |
|
|
2 |
2 – А |
0° 00' 00,0" |
|
|
2 – В |
46° 55' 48,6" |
β 4 = 46° 55' 48,6" |
|
|
2 - 1 |
111° 36' 58,1" |
β 8 = 64° 41' 09,5" |
|
Таблица 4.43
Значения весов и обратных весов измеренных величин
|
S1 |
S2 |
S3 |
S4 |
S5 |
mi (см) |
4,1 |
2,5 |
7,7 |
8,3 |
11,1 |
pi |
1,487 |
4,000 |
0,422 |
0,363 |
0,203 |
qi |
0,672 |
0,250 |
2,372 |
2,756 |
4,928 |
Условные уравнения:
1.
![]()
2.
![]()
3.
![]()
4.
![]() (4.181)
(4.181)
5.
![]()
6.
![]()
7.
![]()
Tаблица 4.44
Предварительные вычисления в линейно-угловой сети
№№ точек |
Гориз.углы β |
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№№ точек |
||
Δх |
Δу |
Х |
Y |
|||||
В |
|
|
|
Ход (1) |
|
|
|
|
210°30'25,6" |
|
|
|
|||||
А |
67°58'17,7"
|
5343,664 |
3981,857 |
А |
||||
98°28'43,3" |
1632,301 |
-240,669 |
+1614,461 |
|||||
2 |
111°36'58,1"
|
5102,995 |
5596,318 |
2о |
||||
30°05'41,4" |
1016,748 |
+879,687 |
+509,831 |
|||||
1 |
78°37'27,2"
|
5982,682 |
6106,149 |
1о |
||||
288°43'08,6" |
1538,317 |
+493,689 |
-1456,946 |
|||||
В |
101°47'13,6" |
6476,371 |
4649,203 |
Вo |
||||
210°30'22,2" |
|
|
|
|||||
А |
|
|
|
|
||||
|
|
Ход (2) |
|
|||||
B |
|
|
|
|
||||
210°30'25,6" |
|
|
|
|||||
A |
42°45'02,6" (левый)
|
5343,664 |
3981,857 |
А |
||||
73°15'28,2" |
2218,342 |
+639,027 |
+2124,308 |
|||||
1 |
43°09'48,8" (правый) |
5982,691 |
6106,165 |
1о
|
||||
210°05'39,4" |
1016,748 |
-879,692 |
-509,822 |
|||||
2 |
64°41'09,5" (првый)
|
5102,999 |
5596,343 |
2о |
||||
325°24'29,9" |
1668,220 |
+1373,310 |
-947,089 |
|||||
B |
65°05'51,3" (левый) |
6476,309 |
4649,254 |
Во |
||||
210°30'21,2" |
|
|
|
|||||
A |
|
|
|
|
||||
Условные уравнения поправок:
![]()
![]()
![]()
 (4.182)
(4.182)


Принцип составления условных уравнений поправок такой же, как и при решении аналогичной задачи для систем полигонометрических ходов, рассмотренных выше.
Вычислим свободные члены (невязки) по данным предварительных вычислений (табл. 4.44), а также по условиям фигур (свойств углов в четырехугольниках с диагоналями). В результате получим: W1 =- 2,4"; W2 = -3,4"; W3= =-4,4"; W4 = 6476,371 – 6476,326 = +45 мм = +4,5 см; W5 = 4649,203 – 4649,235 = - 32 мм = =- 3,2 см; W6 = 6476,309– 6476,326 = -17 мм = -1,7 см; W7 = 4649,254 - 4649,235 = + 19 мм = =+ 1,9 см.
Составим таблицу синусов и косинусов дирекционных углов и разностей координат (в км) – табл. 36.
Таблица 4.45
Значения sin и cos и разностей координат
№№ точек |
Sin αi |
Cos αi |
(хn0-xi0), км |
(yn0-yi0), км |
Ход 1 |
|
|
|
|
А |
(А-2) 0,9891 |
-0,1474 |
+1,133 |
+0,667 |
2 |
(2-1) 0,5014 |
0,8652 |
+1,373 |
-0,947 |
1 |
(1-В) -0,9471 |
0,3209 |
+0,494 |
-1,457 |
В |
|
|
|
|
Ход 2 |
|
|
|
|
А |
(А-1) 0,9576 |
0,2881 |
+1,133 |
+0,667 |
1 |
(1-2) -0,5014 |
-0,8652 |
+0,494 |
-1,457 |
2 |
(2-В) -0,5677 |
0,8232 |
+1,373 |
-0,947 |
В |
|
|
|
|
С учетом данных табл. 4.45 и значений свободных членов уравнения поправок примут окончательный вид:
![]()
![]()
![]()
![]()
![]()
![]() (4.183)
(4.183)
![]()
Составим матрицу коэффициентов aij условных уравнений поправок со строкой обратных весов (табл. 4.46).
Таблица 4.46
Матрица коэффициентов уравнений поправок и обратных весов
j→ i↓ |
qi |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
1 |
1 |
1 |
1 |
1 |
-0,3234 |
+0,5493 |
-0,3234 |
+0,5493 |
2 |
1 |
1 |
1 |
|
-0,3234 |
+0,5493 |
|
|
3 |
1 |
1 |
1 |
1 |
|
|
|
|
4 |
1 |
1 |
1 |
|
+0,4591 |
+0,6656 |
|
|
5 |
1 |
|
1 |
|
|
|
|
|
6 |
1 |
|
1 |
|
+0,7064 |
+0,2395 |
|
|
7 |
1 |
|
1 |
-1 |
+0,7064 |
+0,2395 |
+0,7064 |
+0,2395 |
8 |
1 |
|
1 |
-1 |
+0,4591 |
+0,6656 |
+0,4591 |
+0,6656 |
9 |
0,672 |
|
|
|
-0,1474 |
+0,9891 |
|
|
10 |
0,250 |
|
|
|
+0,8652 |
+0,5014 |
-0,8652 |
-0,5014 |
11 |
2,372 |
|
|
|
+0,3209 |
-0,9471 |
|
|
12 |
2,756 |
|
|
|
|
|
+0,8232 |
-0,5677 |
13 |
4,928 |
|
|
|
|
|
+0,2881 |
+0,9756 |
Составим нормальные уравнения коррелат:
1. 4k1 + 4 k2 + 2 k3 – 0,1877 k4 + 1,7642 k5 – 0,3234 k6 + 0,5493 k7 – 2,4 = 0;
2. 4 k1 + 8 k2 + 1,6842 k4 + 2,9088 k5 + 0,8421 k6 + 1,4544 k7 – 3,4 = 0;
3. 2 k1 + 4 k3 – 1,4889 k4 – 0,3558 k5 – 1,4889 k6 – 0,3558 k7 – 4,4 = 0;
4. -0,1877 k1 + 1,6842 k2 – 1,4889 k3 + 2,0747 k4 – 0,1162 k5 + 0,0720 k6 + 0,1887 k7 + 4,5 = 0;
5. 1,7462 k1 + 2,9088 k2 – 0,3558 k3 – 0,1162 k4 + 4,4522 k5 + 0,1887 k6 + 0,7393 k7 – 3,2 = 0;
6. -0,3234 k1 + 0,8421 k2 – 1,4889 k3 + 0,6272 k4 + 0,1887 k5 + 3,2782 k6 + 0,5027 k7 – 1,7 = 0;
7. 0,5493 k1 + 1,4544 k2 – 0,3558 k3 + 0,1887 k4 + 0,7393 k5 + 0,5027 k6 + 6,4436 k7 + 1,9 = 0.
Из решения данной системы линейных уравнений получим значения коррелат:
k1 = -2,6464; k2 = +2,3697; k3 = +1,4860; k4 = -3,5221; k5 = +0,2898; k6 = +1,0629; k7 = -0,5351.
Вычисляем значения поправок в измеренные величины:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Контрольная подстановка в исходные уравнения поправок (4.183) показала удовлетворительное выполнение указанных условий.
Составим ведомость уравнивания координат (по аналогии с ведомостью предварительных вычислений) с учетом полученных поправок измеренных величин (табл. 4.47).
Таблица 4.47
Ведомость уравнивания
№№ точек |
Гориз.углы β |
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№№ точек |
||
Δх |
Δу |
Х |
Y |
|||||
В |
|
|
|
Ход (1) |
|
|
|
|
210°30'25,6" |
|
|
|
|||||
А |
67°58'20,6"
|
5343,664 |
3981,857 |
А |
||||
98°28'46,2" |
1632,306 |
-240,693 |
+1614,463 |
|||||
2 |
111°36'56,0"
|
5102,971 |
5596,320 |
2 |
||||
30°05'42,2" |
1016,739 |
+879,677 |
+509,830 |
|||||
1 |
78°37'26,2"
|
5982,648 |
6106,150 |
1 |
||||
288°43'08,4" |
1538,284 |
+493,677 |
-1456,915 |
|||||
В A |
101°47'17,2" |
6476,325 |
4649,235 |
В |
||||
210°30'25,6" |
|
|
|
|||||
|
|
Ход (2) |
|
|||||
B |
|
|
|
|
||||
210°30'25,6" |
|
|
|
|||||
A |
42°45'04,5" (левый)
|
5343,664 |
3981,857 |
А |
||||
73°15'30,1" |
2218,331 |
+639,005 |
+2124,304 |
|||||
1 |
43°09'47,9" (правый) |
5982,669 |
6106,161 |
1
|
||||
210°05'42,2" |
1016,739 |
-879,677 |
-509,830 |
|||||
2 |
64°41'09,1" (првый)
|
5102,992 |
5596,331 |
2 |
||||
325°24'33,1" |
1668,252 |
+1373,351 |
-947,086 |
|||||
B А |
65°05'52,5" (левый) |
6476,343 |
4649,245 |
В |
||||
210°30'25,6" |
|
|
|
|||||
Как видно из ведомости уравнивания, остаточные угловые невязки равны нулю, а отклонения координат точки В от исходных в ходе (1) составили -1 мм, в ходе (2) +17мм и + 10 мм (остаточная абсолютная погрешность составляет порядка 2 см, относительная – 1:250000). Уравнивания во втором приближении не требуется.